 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstraint-based graph network simulator
Dec 16, 2021
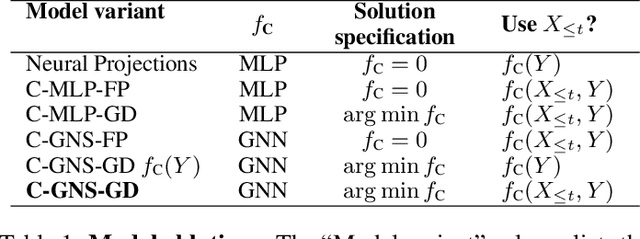

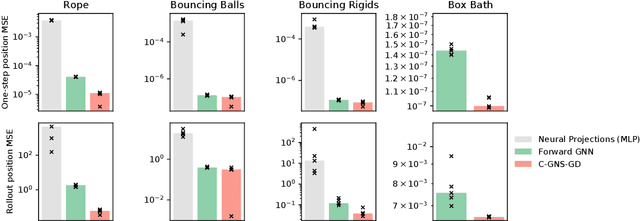
In the rapidly advancing area of learned physical simulators, nearly all methods train forward models that directly predict future states from input states. However, many traditional simulation engines use a constraint-based approach instead of direct prediction. Here we present a framework for constraint-based learned simulation, where a scalar constraint function is implemented as a neural network, and future predictions are computed as the solutions to optimization problems under these learned constraints. We implement our method using a graph neural network as the constraint function and gradient descent as the constraint solver. The architecture can be trained by standard backpropagation. We test the model on a variety of challenging physical domains, including simulated ropes, bouncing balls, colliding irregular shapes and splashing fluids. Our model achieves better or comparable performance to top learned simulators. A key advantage of our model is the ability to generalize to more solver iterations at test time to improve the simulation accuracy. We also show how hand-designed constraints can be added at test time to satisfy objectives which were not present in the training data, which is not possible with forward approaches. Our constraint-based framework is applicable to any setting where forward learned simulators are used, and demonstrates how learned simulators can leverage additional inductive biases as well as the techniques from the field of numerical methods.
Learning ground states of quantum Hamiltonians with graph networks
Oct 12, 2021
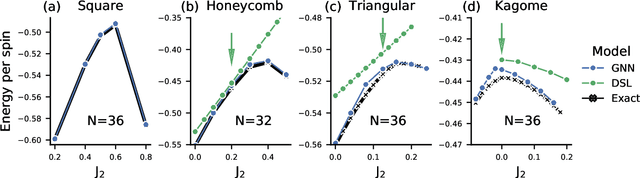
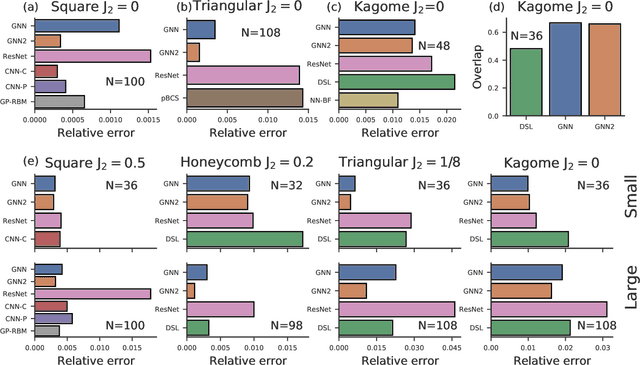
Solving for the lowest energy eigenstate of the many-body Schrodinger equation is a cornerstone problem that hinders understanding of a variety of quantum phenomena. The difficulty arises from the exponential nature of the Hilbert space which casts the governing equations as an eigenvalue problem of exponentially large, structured matrices. Variational methods approach this problem by searching for the best approximation within a lower-dimensional variational manifold. In this work we use graph neural networks to define a structured variational manifold and optimize its parameters to find high quality approximations of the lowest energy solutions on a diverse set of Heisenberg Hamiltonians. Using graph networks we learn distributed representations that by construction respect underlying physical symmetries of the problem and generalize to problems of larger size. Our approach achieves state-of-the-art results on a set of quantum many-body benchmark problems and works well on problems whose solutions are not positive-definite. The discussed techniques hold promise of being a useful tool for studying quantum many-body systems and providing insights into optimization and implicit modeling of exponentially-sized objects.
Learning Mesh-Based Simulation with Graph Networks
Oct 07, 2020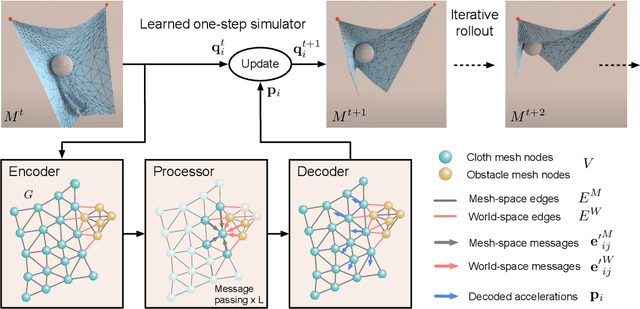
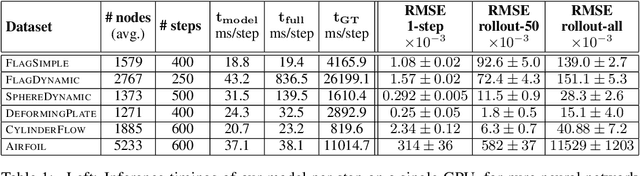
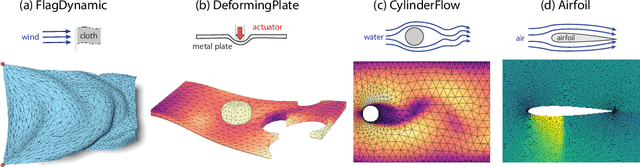
Mesh-based simulations are central to modeling complex physical systems in many disciplines across science and engineering. Mesh representations support powerful numerical integration methods and their resolution can be adapted to strike favorable trade-offs between accuracy and efficiency. However, high-dimensional scientific simulations are very expensive to run, and solvers and parameters must often be tuned individually to each system studied. Here we introduce MeshGraphNets, a framework for learning mesh-based simulations using graph neural networks. Our model can be trained to pass messages on a mesh graph and to adapt the mesh discretization during forward simulation. Our results show it can accurately predict the dynamics of a wide range of physical systems, including aerodynamics, structural mechanics, and cloth. The model's adaptivity supports learning resolution-independent dynamics and can scale to more complex state spaces at test time. Our method is also highly efficient, running 1-2 orders of magnitude faster than the simulation on which it is trained. Our approach broadens the range of problems on which neural network simulators can operate and promises to improve the efficiency of complex, scientific modeling tasks.
Learning to Simulate Complex Physics with Graph Networks
Feb 21, 2020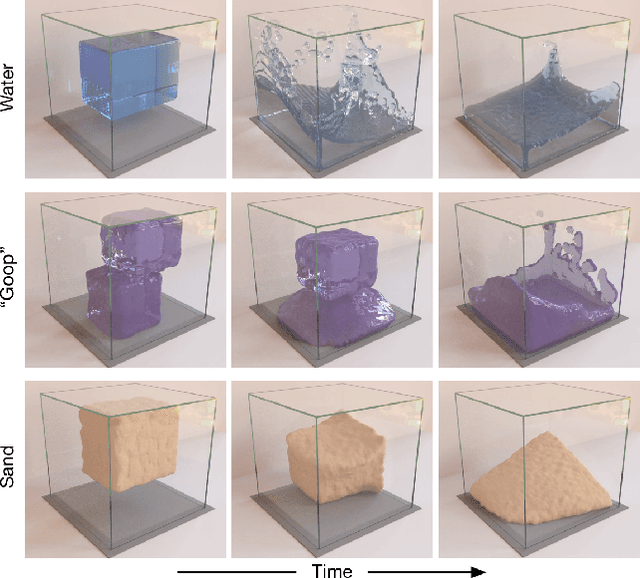
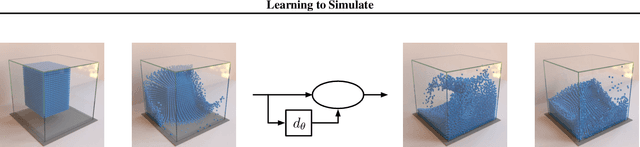
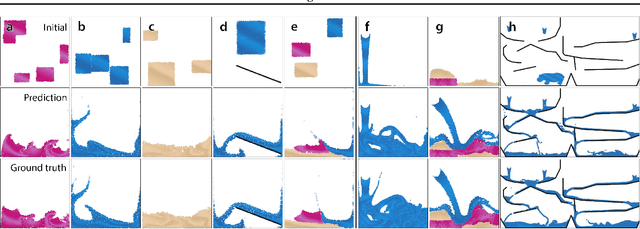
Here we present a general framework for learning simulation, and provide a single model implementation that yields state-of-the-art performance across a variety of challenging physical domains, involving fluids, rigid solids, and deformable materials interacting with one another. Our framework---which we term "Graph Network-based Simulators" (GNS)---represents the state of a physical system with particles, expressed as nodes in a graph, and computes dynamics via learned message-passing. Our results show that our model can generalize from single-timestep predictions with thousands of particles during training, to different initial conditions, thousands of timesteps, and at least an order of magnitude more particles at test time. Our model was robust to hyperparameter choices across various evaluation metrics: the main determinants of long-term performance were the number of message-passing steps, and mitigating the accumulation of error by corrupting the training data with noise. Our GNS framework is the most accurate general-purpose learned physics simulator to date, and holds promise for solving a wide range of complex forward and inverse problems.
Combining Q-Learning and Search with Amortized Value Estimates
Jan 10, 2020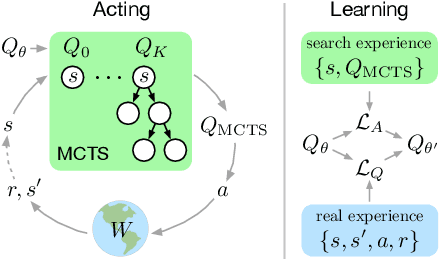
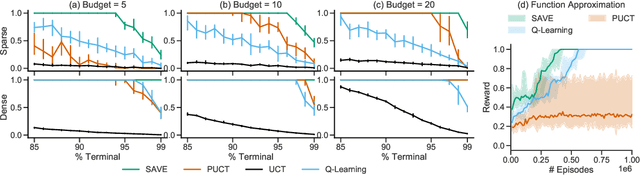
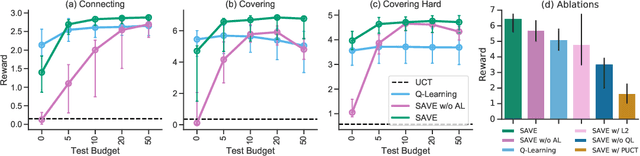
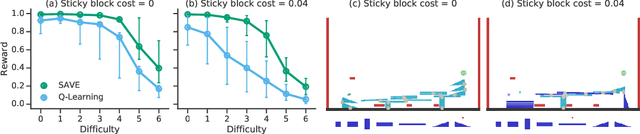
We introduce "Search with Amortized Value Estimates" (SAVE), an approach for combining model-free Q-learning with model-based Monte-Carlo Tree Search (MCTS). In SAVE, a learned prior over state-action values is used to guide MCTS, which estimates an improved set of state-action values. The new Q-estimates are then used in combination with real experience to update the prior. This effectively amortizes the value computation performed by MCTS, resulting in a cooperative relationship between model-free learning and model-based search. SAVE can be implemented on top of any Q-learning agent with access to a model, which we demonstrate by incorporating it into agents that perform challenging physical reasoning tasks and Atari. SAVE consistently achieves higher rewards with fewer training steps, and---in contrast to typical model-based search approaches---yields strong performance with very small search budgets. By combining real experience with information computed during search, SAVE demonstrates that it is possible to improve on both the performance of model-free learning and the computational cost of planning.
One-Shot High-Fidelity Imitation: Training Large-Scale Deep Nets with RL
Oct 11, 2018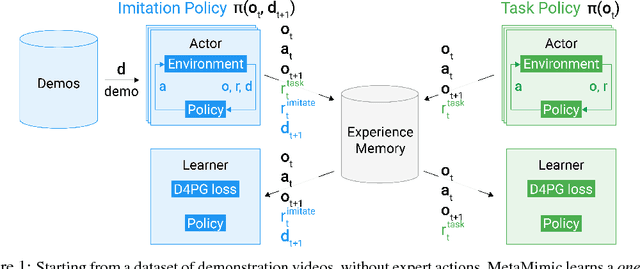
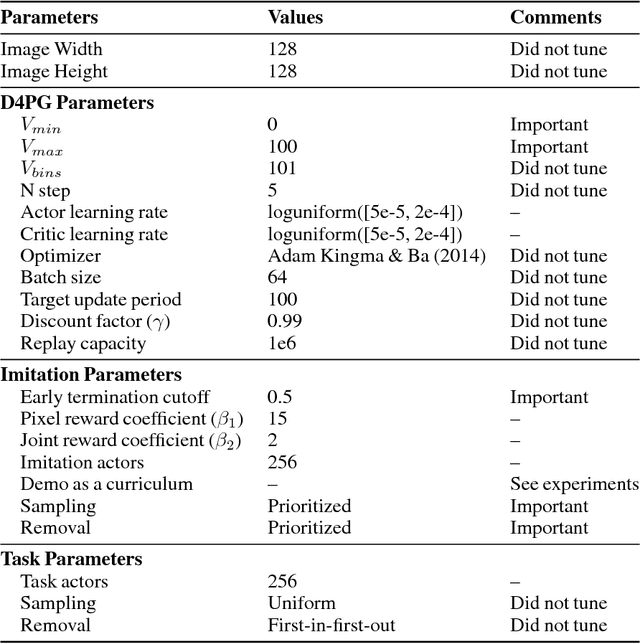
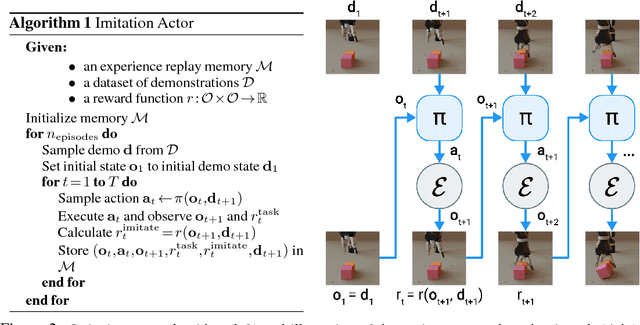
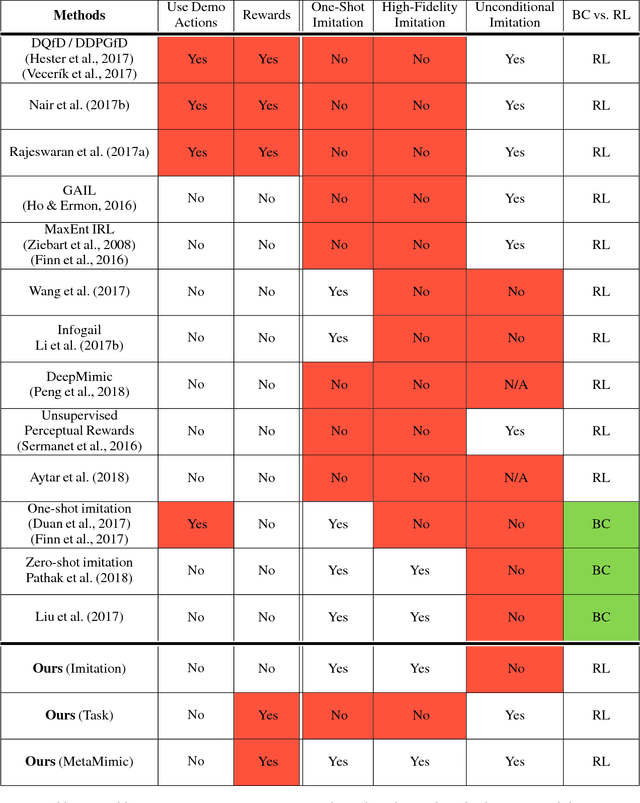
Humans are experts at high-fidelity imitation -- closely mimicking a demonstration, often in one attempt. Humans use this ability to quickly solve a task instance, and to bootstrap learning of new tasks. Achieving these abilities in autonomous agents is an open problem. In this paper, we introduce an off-policy RL algorithm (MetaMimic) to narrow this gap. MetaMimic can learn both (i) policies for high-fidelity one-shot imitation of diverse novel skills, and (ii) policies that enable the agent to solve tasks more efficiently than the demonstrators. MetaMimic relies on the principle of storing all experiences in a memory and replaying these to learn massive deep neural network policies by off-policy RL. This paper introduces, to the best of our knowledge, the largest existing neural networks for deep RL and shows that larger networks with normalization are needed to achieve one-shot high-fidelity imitation on a challenging manipulation task. The results also show that both types of policy can be learned from vision, in spite of the task rewards being sparse, and without access to demonstrator actions.
Playing hard exploration games by watching YouTube
May 29, 2018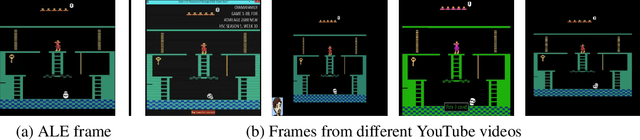
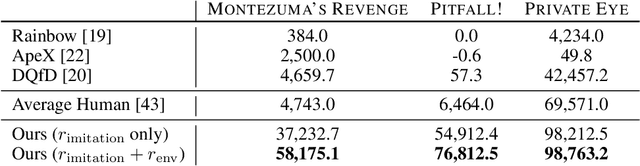
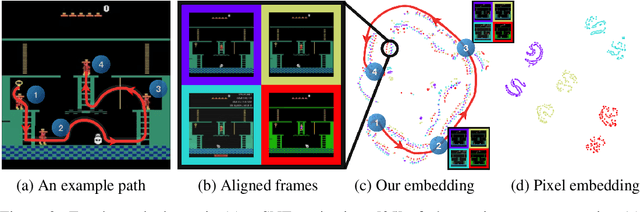
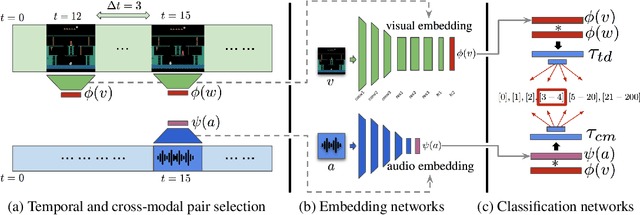
Deep reinforcement learning methods traditionally struggle with tasks where environment rewards are particularly sparse. One successful method of guiding exploration in these domains is to imitate trajectories provided by a human demonstrator. However, these demonstrations are typically collected under artificial conditions, i.e. with access to the agent's exact environment setup and the demonstrator's action and reward trajectories. Here we propose a two-stage method that overcomes these limitations by relying on noisy, unaligned footage without access to such data. First, we learn to map unaligned videos from multiple sources to a common representation using self-supervised objectives constructed over both time and modality (i.e. vision and sound). Second, we embed a single YouTube video in this representation to construct a reward function that encourages an agent to imitate human gameplay. This method of one-shot imitation allows our agent to convincingly exceed human-level performance on the infamously hard exploration games Montezuma's Revenge, Pitfall! and Private Eye for the first time, even if the agent is not presented with any environment rewards.