 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Life Gives You BC, Make Q-functions: Extracting Q-values from Behavior Cloning for On-Robot Reinforcement Learning
May 06, 2026Behavior Cloning (BC) has emerged as a highly effective paradigm for robot learning. However, BC lacks a self-guided mechanism for online improvement after demonstrations have been collected. Existing offline-to-online learning methods often cause policies to replace previously learned good actions due to a distribution mismatch between offline data and online learning. In this work, we propose Q2RL, Q-Estimation and Q-Gating from BC for Reinforcement Learning, an algorithm for efficient offline-to-online learning. Our method consists of two parts: (1) Q-Estimation extracts a Q-function from a BC policy using a few interaction steps with the environment, followed by online RL with (2) Q-Gating, which switches between BC and RL policy actions based on their respective Q-values to collect samples for RL policy training. Across manipulation tasks from D4RL and robomimic benchmarks, Q2RL outperforms SOTA offline-to-online learning baselines on success rate and time to convergence. Q2RL is efficient enough to be applied in an on-robot RL setting, learning robust policies for contact-rich and high precision manipulation tasks such as pipe assembly and kitting, in 1-2 hours of online interaction, achieving success rates of up to 100% and up to 3.75x improvement against the original BC policy. Code and video are available at https://pages.rai-inst.com/q2rl_website/
SOLE-R1: Video-Language Reasoning as the Sole Reward for On-Robot Reinforcement Learning
Mar 30, 2026Vision-language models (VLMs) have shown impressive capabilities across diverse tasks, motivating efforts to leverage these models to supervise robot learning. However, when used as evaluators in reinforcement learning (RL), today's strongest models often fail under partial observability and distribution shift, enabling policies to exploit perceptual errors rather than solve the task. To address this limitation, we introduce SOLE-R1 (Self-Observing LEarner), a video-language reasoning model explicitly designed to serve as the sole reward signal for online RL. Given only raw video observations and a natural-language goal, SOLE-R1 performs per-timestep spatiotemporal chain-of-thought (CoT) reasoning and produces dense estimates of task progress that can be used directly as rewards. To train SOLE-R1, we develop a large-scale video trajectory and reasoning synthesis pipeline that generates temporally grounded CoT traces aligned with continuous progress supervision. This data is combined with foundational spatial and multi-frame temporal reasoning, and used to train the model with a hybrid framework that couples supervised fine-tuning with RL from verifiable rewards. Across four different simulation environments and a real-robot setting, SOLE-R1 enables zero-shot online RL from random initialization: robots learn previously unseen manipulation tasks without ground-truth rewards, success indicators, demonstrations, or task-specific tuning. SOLE-R1 succeeds on 24 unseen tasks and substantially outperforms strong vision-language rewarders, including GPT-5 and Gemini-3-Pro, while exhibiting markedly greater robustness to reward hacking.
You've Got a Golden Ticket: Improving Generative Robot Policies With A Single Noise Vector
Mar 16, 2026What happens when a pretrained generative robot policy is provided a constant initial noise as input, rather than repeatedly sampling it from a Gaussian? We demonstrate that the performance of a pretrained, frozen diffusion or flow matching policy can be improved with respect to a downstream reward by swapping the sampling of initial noise from the prior distribution (typically isotropic Gaussian) with a well-chosen, constant initial noise input -- a golden ticket. We propose a search method to find golden tickets using Monte-Carlo policy evaluation that keeps the pretrained policy frozen, does not train any new networks, and is applicable to all diffusion/flow matching policies (and therefore many VLAs). Our approach to policy improvement makes no assumptions beyond being able to inject initial noise into the policy and calculate (sparse) task rewards of episode rollouts, making it deployable with no additional infrastructure or models. Our method improves the performance of policies in 38 out of 43 tasks across simulated and real-world robot manipulation benchmarks, with relative improvements in success rate by up to 58% for some simulated tasks, and 60% within 50 search episodes for real-world tasks. We also show unique benefits of golden tickets for multi-task settings: the diversity of behaviors from different tickets naturally defines a Pareto frontier for balancing different objectives (e.g., speed, success rates); in VLAs, we find that a golden ticket optimized for one task can also boost performance in other related tasks. We release a codebase with pretrained policies and golden tickets for simulation benchmarks using VLAs, diffusion policies, and flow matching policies.
On-Robot Reinforcement Learning with Goal-Contrastive Rewards
Oct 25, 2024Reinforcement Learning (RL) has the potential to enable robots to learn from their own actions in the real world. Unfortunately, RL can be prohibitively expensive, in terms of on-robot runtime, due to inefficient exploration when learning from a sparse reward signal. Designing dense reward functions is labour-intensive and requires domain expertise. In our work, we propose GCR (Goal-Contrastive Rewards), a dense reward function learning method that can be trained on passive video demonstrations. By using videos without actions, our method is easier to scale, as we can use arbitrary videos. GCR combines two loss functions, an implicit value loss function that models how the reward increases when traversing a successful trajectory, and a goal-contrastive loss that discriminates between successful and failed trajectories. We perform experiments in simulated manipulation environments across RoboMimic and MimicGen tasks, as well as in the real world using a Franka arm and a Spot quadruped. We find that GCR leads to a more-sample efficient RL, enabling model-free RL to solve about twice as many tasks as our baseline reward learning methods. We also demonstrate positive cross-embodiment transfer from videos of people and of other robots performing a task. Appendix: \url{https://tinyurl.com/gcr-appendix-2}.
Neural Grasp Distance Fields for Robot Manipulation
Nov 04, 2022We formulate grasp learning as a neural field and present Neural Grasp Distance Fields (NGDF). Here, the input is a 6D pose of a robot end effector and output is a distance to a continuous manifold of valid grasps for an object. In contrast to current approaches that predict a set of discrete candidate grasps, the distance-based NGDF representation is easily interpreted as a cost, and minimizing this cost produces a successful grasp pose. This grasp distance cost can be incorporated directly into a trajectory optimizer for joint optimization with other costs such as trajectory smoothness and collision avoidance. During optimization, as the various costs are balanced and minimized, the grasp target is allowed to smoothly vary, as the learned grasp field is continuous. In simulation benchmarks with a Franka arm, we find that joint grasping and planning with NGDF outperforms baselines by 63% execution success while generalizing to unseen query poses and unseen object shapes. Project page: https://sites.google.com/view/neural-grasp-distance-fields.
Learning to Singulate Layers of Cloth using Tactile Feedback
Jul 22, 2022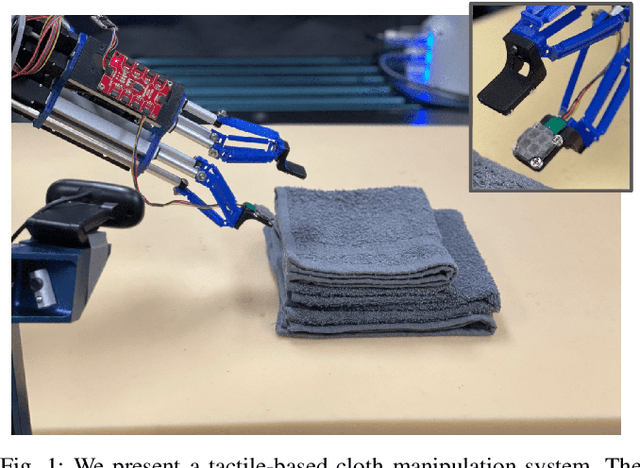
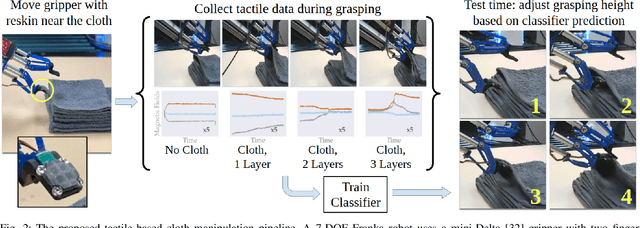
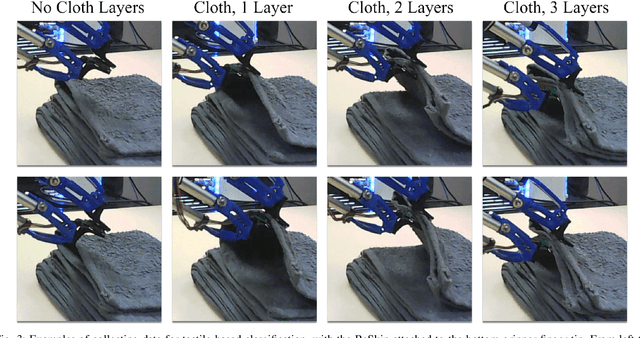
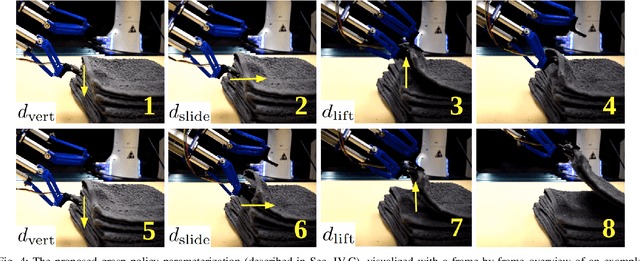
Robotic manipulation of cloth has applications ranging from fabrics manufacturing to handling blankets and laundry. Cloth manipulation is challenging for robots largely due to their high degrees of freedom, complex dynamics, and severe self-occlusions when in folded or crumpled configurations. Prior work on robotic manipulation of cloth relies primarily on vision sensors alone, which may pose challenges for fine-grained manipulation tasks such as grasping a desired number of cloth layers from a stack of cloth. In this paper, we propose to use tactile sensing for cloth manipulation; we attach a tactile sensor (ReSkin) to one of the two fingertips of a Franka robot and train a classifier to determine whether the robot is grasping a specific number of cloth layers. During test-time experiments, the robot uses this classifier as part of its policy to grasp one or two cloth layers using tactile feedback to determine suitable grasping points. Experimental results over 180 physical trials suggest that the proposed method outperforms baselines that do not use tactile feedback and has better generalization to unseen cloth compared to methods that use image classifiers. Code, data, and videos are available at https://sites.google.com/view/reskin-cloth.
FabricFlowNet: Bimanual Cloth Manipulation with a Flow-based Policy
Nov 10, 2021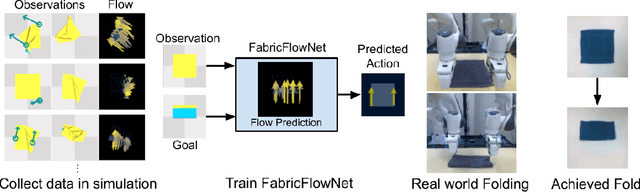

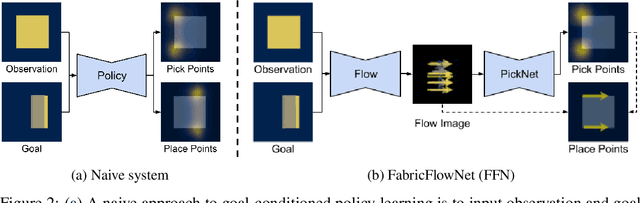

We address the problem of goal-directed cloth manipulation, a challenging task due to the deformability of cloth. Our insight is that optical flow, a technique normally used for motion estimation in video, can also provide an effective representation for corresponding cloth poses across observation and goal images. We introduce FabricFlowNet (FFN), a cloth manipulation policy that leverages flow as both an input and as an action representation to improve performance. FabricFlowNet also elegantly switches between bimanual and single-arm actions based on the desired goal. We show that FabricFlowNet significantly outperforms state-of-the-art model-free and model-based cloth manipulation policies that take image input. We also present real-world experiments on a bimanual system, demonstrating effective sim-to-real transfer. Finally, we show that our method generalizes when trained on a single square cloth to other cloth shapes, such as T-shirts and rectangular cloths. Video and other supplementary materials are available at: https://sites.google.com/view/fabricflownet.
Cloth Region Segmentation for Robust Grasp Selection
Aug 13, 2020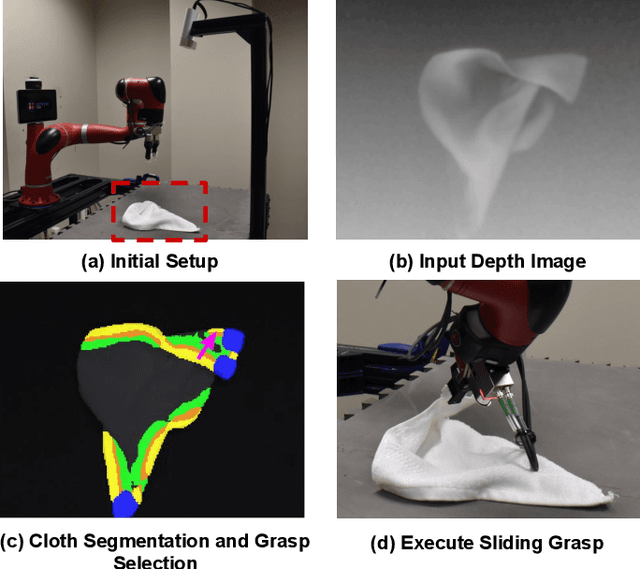
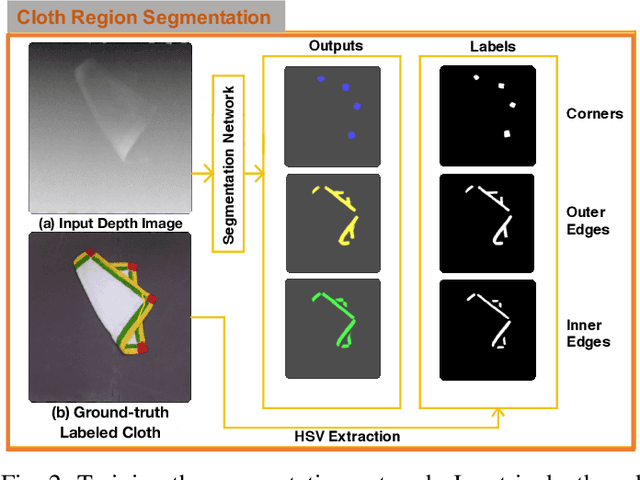
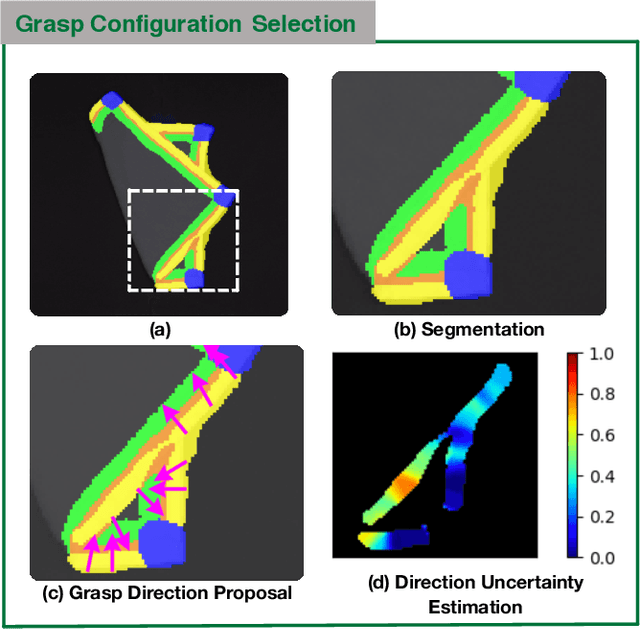

Cloth detection and manipulation is a common task in domestic and industrial settings, yet such tasks remain a challenge for robots due to cloth deformability. Furthermore, in many cloth-related tasks like laundry folding and bed making, it is crucial to manipulate specific regions like edges and corners, as opposed to folds. In this work, we focus on the problem of segmenting and grasping these key regions. Our approach trains a network to segment the edges and corners of a cloth from a depth image, distinguishing such regions from wrinkles or folds. We also provide a novel algorithm for estimating the grasp location, direction, and directional uncertainty from the segmentation. We demonstrate our method on a real robot system and show that it outperforms baseline methods on grasping success. Video and other supplementary materials are available at: https://sites.google.com/view/cloth-segmentation.
Multi-modal Transfer Learning for Grasping Transparent and Specular Objects
May 29, 2020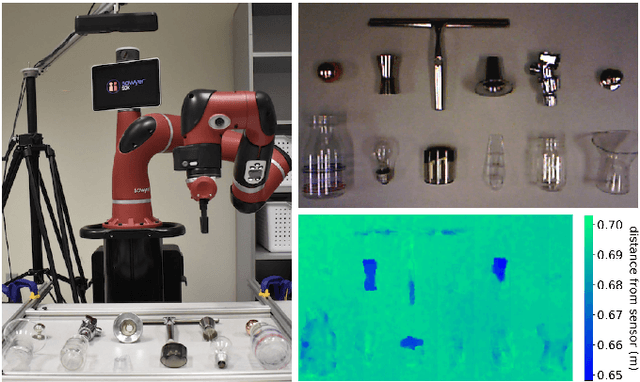
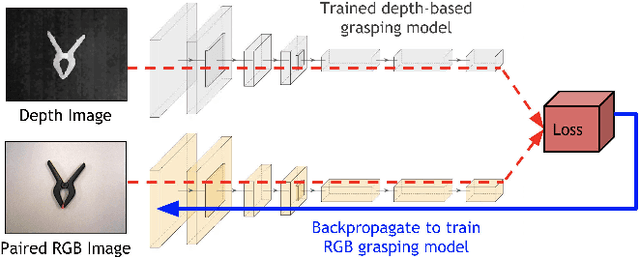
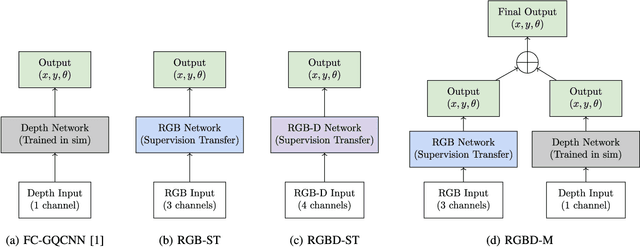

State-of-the-art object grasping methods rely on depth sensing to plan robust grasps, but commercially available depth sensors fail to detect transparent and specular objects. To improve grasping performance on such objects, we introduce a method for learning a multi-modal perception model by bootstrapping from an existing uni-modal model. This transfer learning approach requires only a pre-existing uni-modal grasping model and paired multi-modal image data for training, foregoing the need for ground-truth grasp success labels nor real grasp attempts. Our experiments demonstrate that our approach is able to reliably grasp transparent and reflective objects. Video and supplementary material are available at https://sites.google.com/view/transparent-specular-grasping.
* RA-L with presentation at ICRA 2020