 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety-aware Policy Optimisation for Autonomous Racing
Oct 14, 2021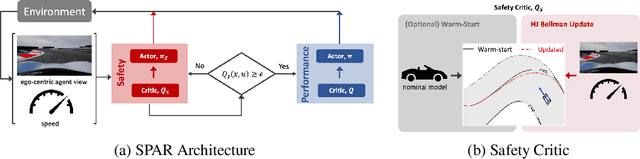
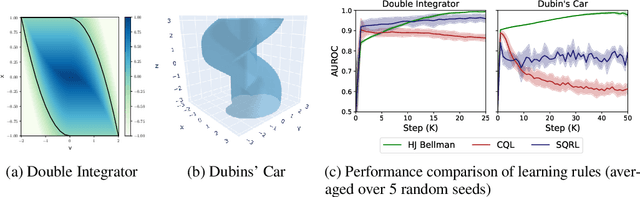
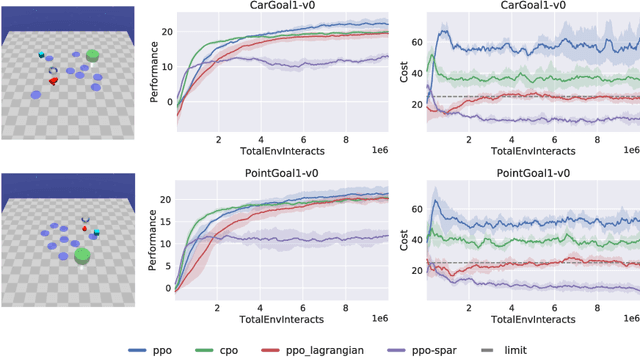
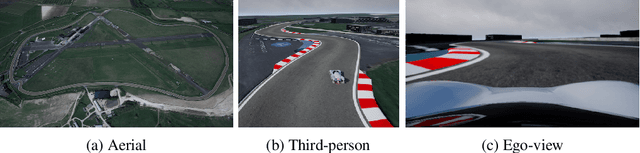
To be viable for safety-critical applications, such as autonomous driving and assistive robotics, autonomous agents should adhere to safety constraints throughout the interactions with their environments. Instead of learning about safety by collecting samples, including unsafe ones, methods such as Hamilton-Jacobi (HJ) reachability compute safe sets with theoretical guarantees using models of the system dynamics. However, HJ reachability is not scalable to high-dimensional systems, and the guarantees hinge on the quality of the model. In this work, we inject HJ reachability theory into the constrained Markov decision process (CMDP) framework, as a control-theoretical approach for safety analysis via model-free updates on state-action pairs. Furthermore, we demonstrate that the HJ safety value can be learned directly on vision context, the highest-dimensional problem studied via the method to-date. We evaluate our method on several benchmark tasks, including Safety Gym and Learn-to-Race (L2R), a recently-released high-fidelity autonomous racing environment. Our approach has significantly fewer constraint violations in comparison to other constrained RL baselines, and achieve the new state-of-the-art results on the L2R benchmark task.
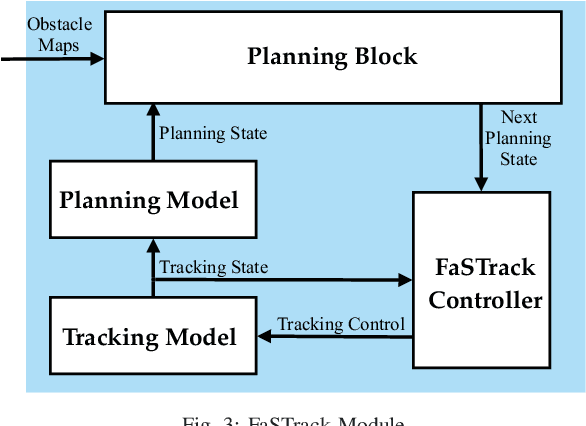
FaSTrack: a Modular Framework for Real-Time Motion Planning and Guaranteed Safe Tracking
Mar 13, 2021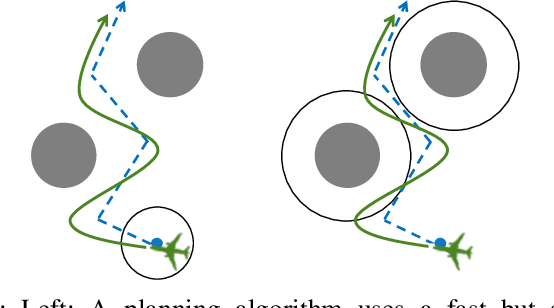
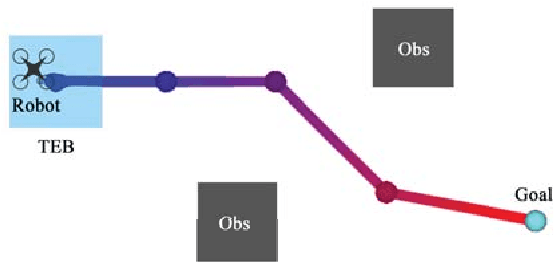
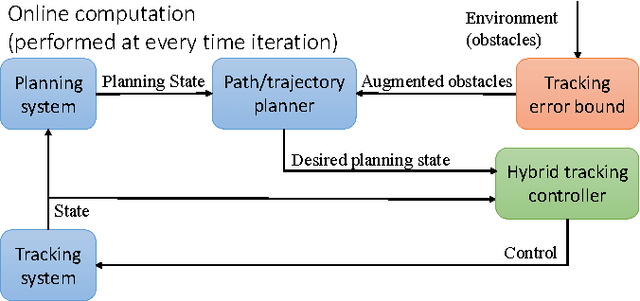
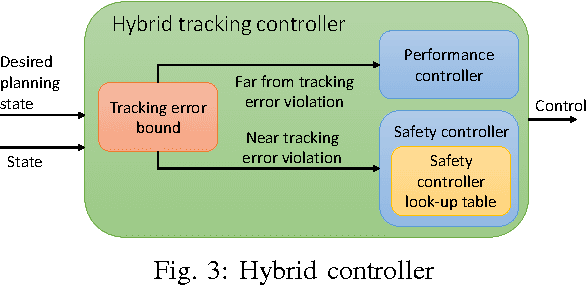
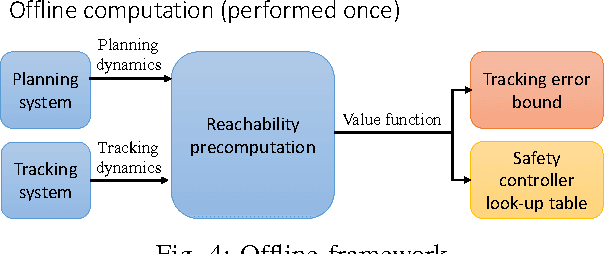
Real-time, guaranteed safe trajectory planning is vital for navigation in unknown environments. However, real-time navigation algorithms typically sacrifice robustness for computation speed. Alternatively, provably safe trajectory planning tends to be too computationally intensive for real-time replanning. We propose FaSTrack, Fast and Safe Tracking, a framework that achieves both real-time replanning and guaranteed safety. In this framework, real-time computation is achieved by allowing any trajectory planner to use a simplified \textit{planning model} of the system. The plan is tracked by the system, represented by a more realistic, higher-dimensional \textit{tracking model}. We precompute the tracking error bound (TEB) due to mismatch between the two models and due to external disturbances. We also obtain the corresponding tracking controller used to stay within the TEB. The precomputation does not require prior knowledge of the environment. We demonstrate FaSTrack using Hamilton-Jacobi reachability for precomputation and three different real-time trajectory planners with three different tracking-planning model pairs.
A Scalable Framework For Real-Time Multi-Robot, Multi-Human Collision Avoidance
Nov 14, 2018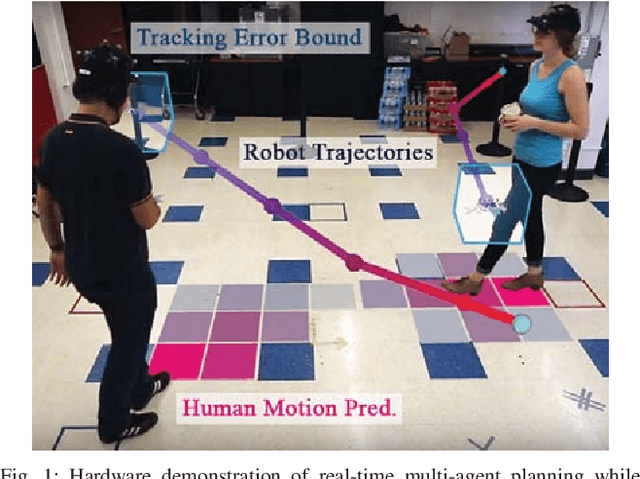
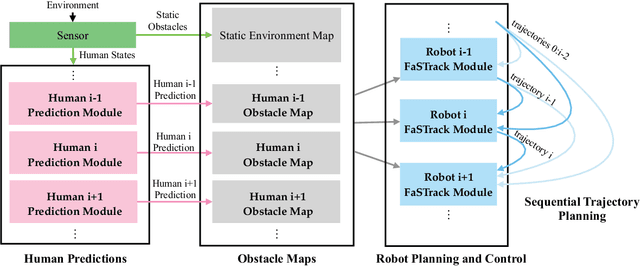
Robust motion planning is a well-studied problem in the robotics literature, yet current algorithms struggle to operate scalably and safely in the presence of other moving agents, such as humans. This paper introduces a novel framework for robot navigation that accounts for high-order system dynamics and maintains safety in the presence of external disturbances, other robots, and non-deterministic intentional agents. Our approach precomputes a tracking error margin for each robot, generates confidence-aware human motion predictions, and coordinates multiple robots with a sequential priority ordering, effectively enabling scalable safe trajectory planning and execution. We demonstrate our approach in hardware with two robots and two humans. We also showcase our work's scalability in a larger simulation.
Robust Tracking with Model Mismatch for Fast and Safe Planning: an SOS Optimization Approach
Aug 02, 2018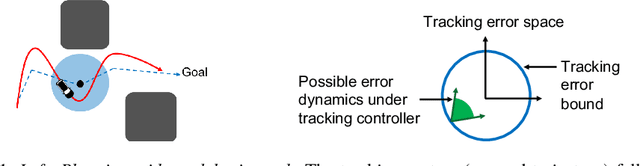
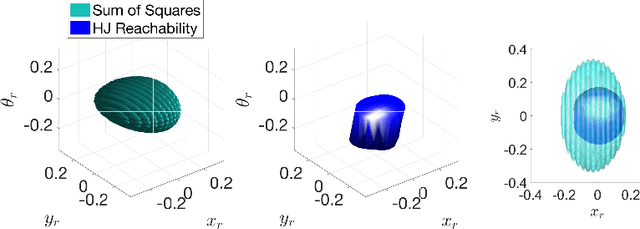
In the pursuit of real-time motion planning, a commonly adopted practice is to compute a trajectory by running a planning algorithm on a simplified, low-dimensional dynamical model, and then employ a feedback tracking controller that tracks such a trajectory by accounting for the full, high-dimensional system dynamics. While this strategy of planning with model mismatch generally yields fast computation times, there are no guarantees of dynamic feasibility, which hampers application to safety-critical systems. Building upon recent work that addressed this problem through the lens of Hamilton-Jacobi (HJ) reachability, we devise an algorithmic framework whereby one computes, offline, for a pair of "planner" (i.e., low-dimensional) and "tracking" (i.e., high-dimensional) models, a feedback tracking controller and associated tracking bound. This bound is then used as a safety margin when generating motion plans via the low-dimensional model. Specifically, we harness the computational tool of sum-of-squares (SOS) programming to design a bilinear optimization algorithm for the computation of the feedback tracking controller and associated tracking bound. The algorithm is demonstrated via numerical experiments, with an emphasis on investigating the trade-off between the increased computational scalability afforded by SOS and its intrinsic conservativeness. Collectively, our results enable scaling the appealing strategy of planning with model mismatch to systems that are beyond the reach of HJ analysis, while maintaining safety guarantees.
Probabilistically Safe Robot Planning with Confidence-Based Human Predictions
May 31, 2018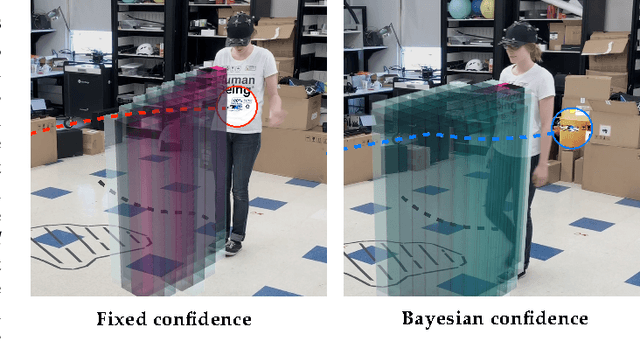
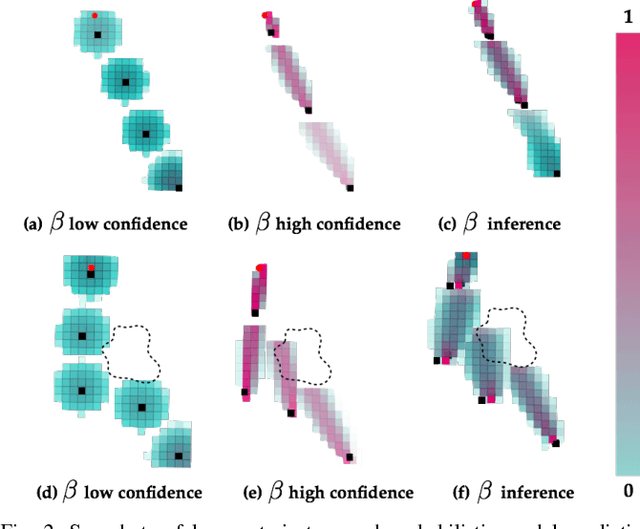
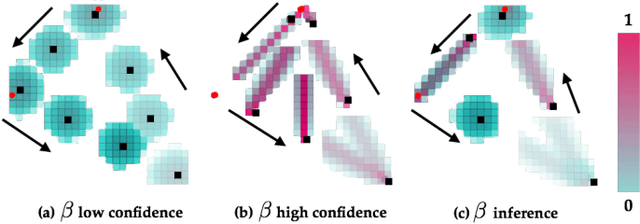
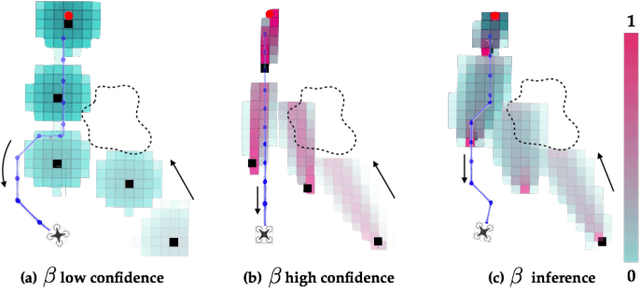
In order to safely operate around humans, robots can employ predictive models of human motion. Unfortunately, these models cannot capture the full complexity of human behavior and necessarily introduce simplifying assumptions. As a result, predictions may degrade whenever the observed human behavior departs from the assumed structure, which can have negative implications for safety. In this paper, we observe that how "rational" human actions appear under a particular model can be viewed as an indicator of that model's ability to describe the human's current motion. By reasoning about this model confidence in a real-time Bayesian framework, we show that the robot can very quickly modulate its predictions to become more uncertain when the model performs poorly. Building on recent work in provably-safe trajectory planning, we leverage these confidence-aware human motion predictions to generate assured autonomous robot motion. Our new analysis combines worst-case tracking error guarantees for the physical robot with probabilistic time-varying human predictions, yielding a quantitative, probabilistic safety certificate. We demonstrate our approach with a quadcopter navigating around a human.
FaSTrack: a Modular Framework for Fast and Guaranteed Safe Motion Planning
Mar 21, 2017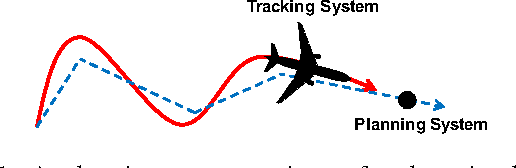
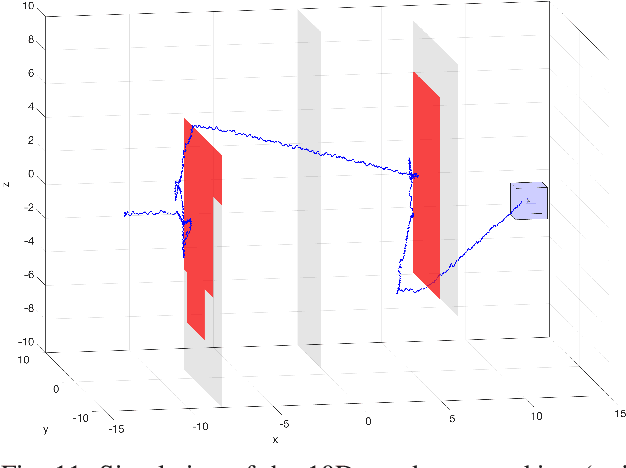
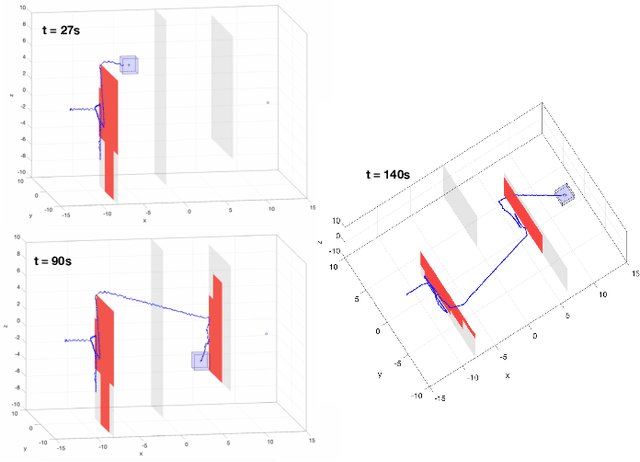
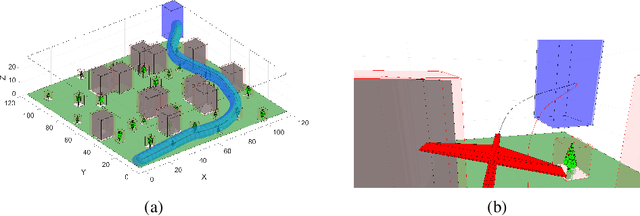
Fast and safe navigation of dynamical systems through a priori unknown cluttered environments is vital to many applications of autonomous systems. However, trajectory planning for autonomous systems is computationally intensive, often requiring simplified dynamics that sacrifice safety and dynamic feasibility in order to plan efficiently. Conversely, safe trajectories can be computed using more sophisticated dynamic models, but this is typically too slow to be used for real-time planning. We propose a new algorithm FaSTrack: Fast and Safe Tracking for High Dimensional systems. A path or trajectory planner using simplified dynamics to plan quickly can be incorporated into the FaSTrack framework, which provides a safety controller for the vehicle along with a guaranteed tracking error bound. This bound captures all possible deviations due to high dimensional dynamics and external disturbances. Note that FaSTrack is modular and can be used with most current path or trajectory planners. We demonstrate this framework using a 10D nonlinear quadrotor model tracking a 3D path obtained from an RRT planner.