 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTelexistence and Teleoperation for Walking Humanoid Robots
Apr 04, 2019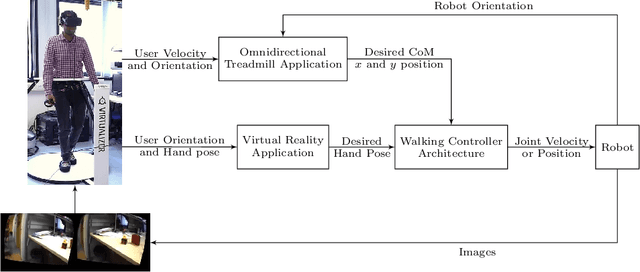
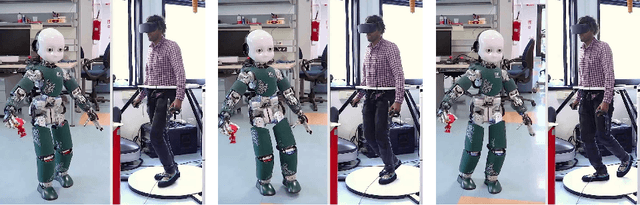
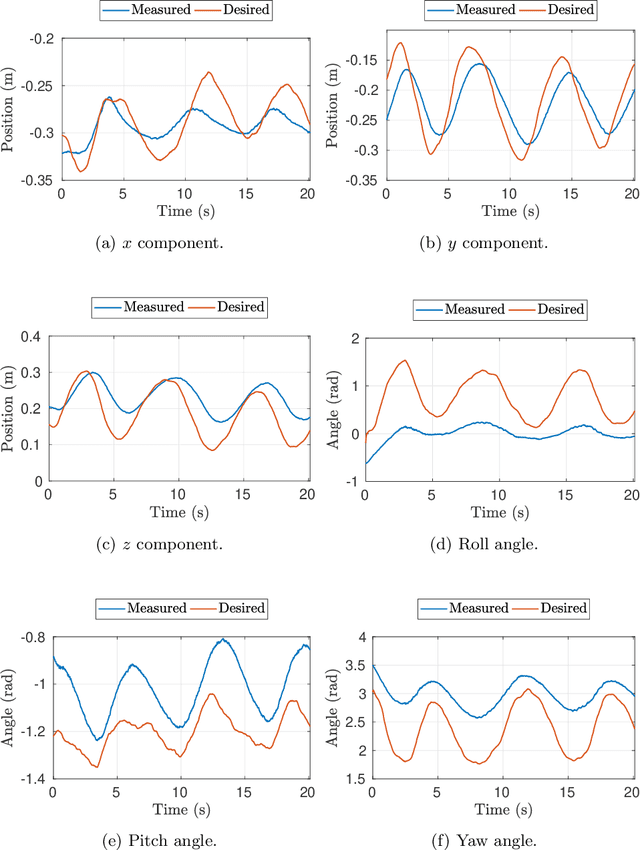
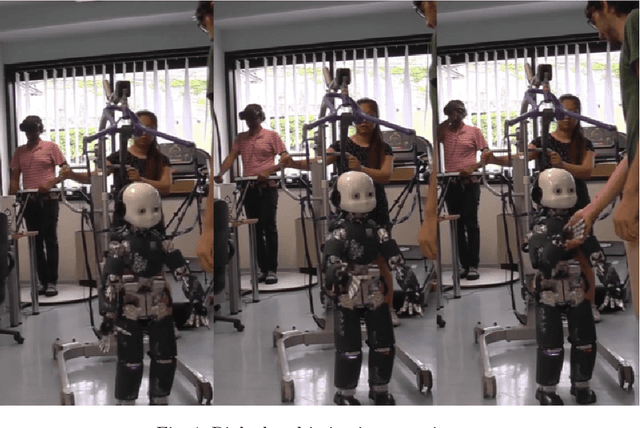
This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.
A Benchmarking of DCM Based Architectures for Position and Velocity Controlled Walking of Humanoid Robots
Nov 10, 2018
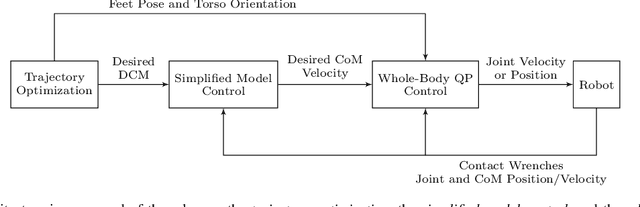
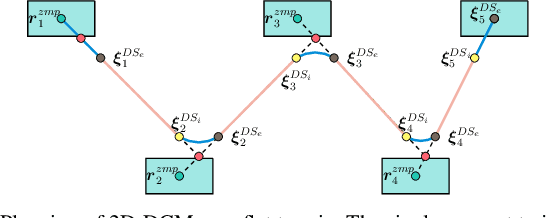
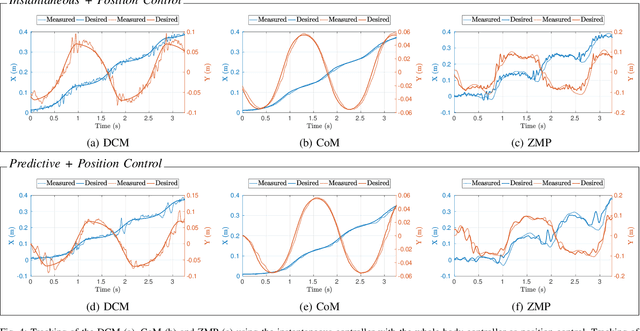
This paper contributes towards the development and comparison of Divergent-Component-of-Motion (DCM) based control architectures for humanoid robot locomotion. More precisely, we present and compare several DCM based implementations of a three layer control architecture. From top to bottom, these three layers are here called: trajectory optimization, simplified model control, and whole-body QP control. All layers use the DCM concept to generate references for the layer below. For the simplified model control layer, we present and compare both instantaneous and Receding Horizon Control controllers. For the whole-body QP control layer, we present and compare controllers for position and velocity control robots. Experimental results are carried out on the one-meter tall iCub humanoid robot. We show which implementation of the above control architecture allows the robot to achieve a walking velocity of 0.41 meters per second.
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.
Modeling and Control of Humanoid Robots in Dynamic Environments: iCub Balancing on a Seesaw
Mar 09, 2018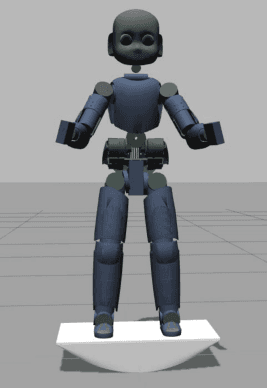
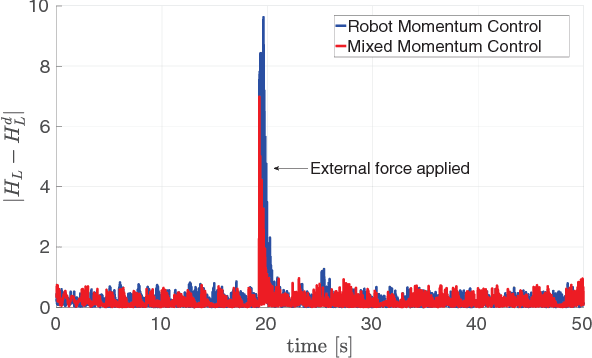
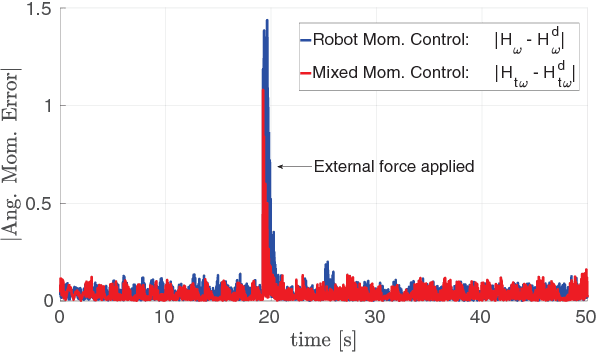
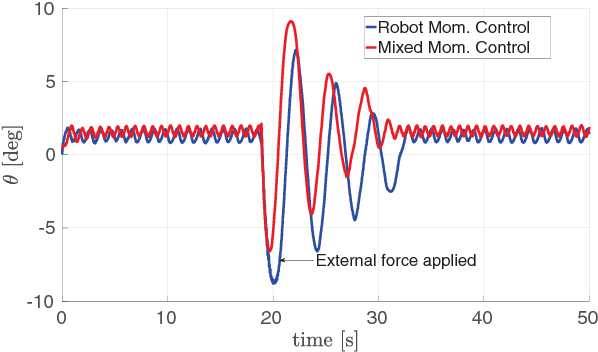
Forthcoming applications concerning humanoid robots may involve physical interaction between the robot and a dynamic environment. In such scenario, classical balancing and walking controllers that neglect the environment dynamics may not be sufficient for achieving a stable robot behavior. This paper presents a modeling and control framework for balancing humanoid robots in contact with a dynamic environment. We first model the robot and environment dynamics, together with the contact constraints. Then, a control strategy for stabilizing the full system is proposed. Theoretical results are verified in simulation with robot iCub balancing on a seesaw.
A Predictive Momentum-Based Whole-Body Torque Controller: Theory and Simulations for the iCub Stepping
Jul 28, 2017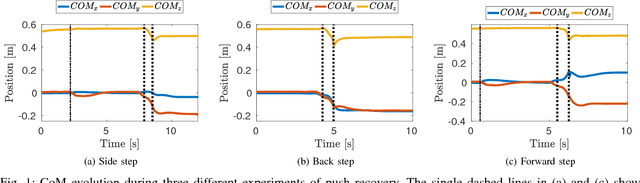
When balancing, a humanoid robot can be easily subjected to unexpected disturbances like external pushes. In these circumstances, reactive movements as steps become a necessary requirement in order to avoid potentially harmful falling states. In this paper we conceive a Model Predictive Controller which determines a desired set of contact wrenches by predicting the future evolution of the robot, while taking into account constraints switching in case of steps. The control inputs computed by this strategy, namely the desired contact wrenches, are directly obtained on the robot through a modification of the momentum-based whole-body torque controller currently implemented on iCub. The proposed approach is validated through simulations in a stepping scenario, revealing high robustness and reliability when executing a recovery strategy.
A Receding Horizon Push Recovery Strategy for Balancing the iCub Humanoid Robot
May 30, 2017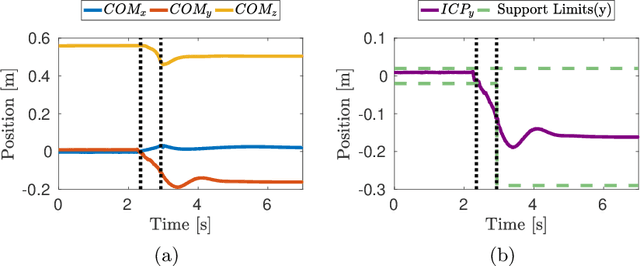
Balancing and reacting to strong and unexpected pushes is a critical requirement for humanoid robots. We recently designed a capture point based approach which interfaces with a momentum-based torque controller and we implemented and validated it on the iCub humanoid robot. In this work we implement a Receding Horizon control, also known as Model Predictive Control, to add the possibility to predict the future evolution of the robot, especially the constraints switching given by the hybrid nature of the system. We prove that the proposed MPC extension makes the step-recovery controller more robust and reliable when executing the recovery strategy. Experiments in simulation show the results of the proposed approach.
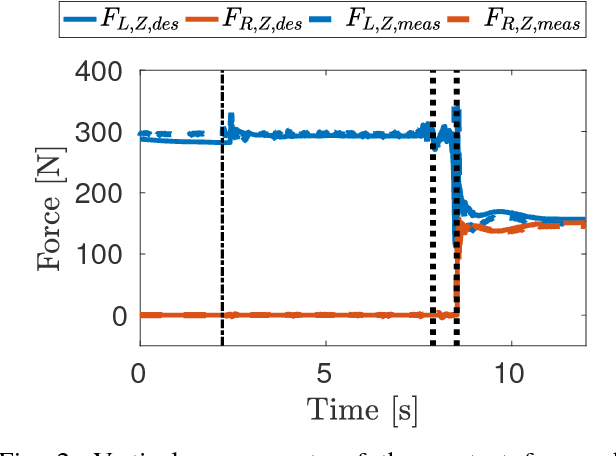
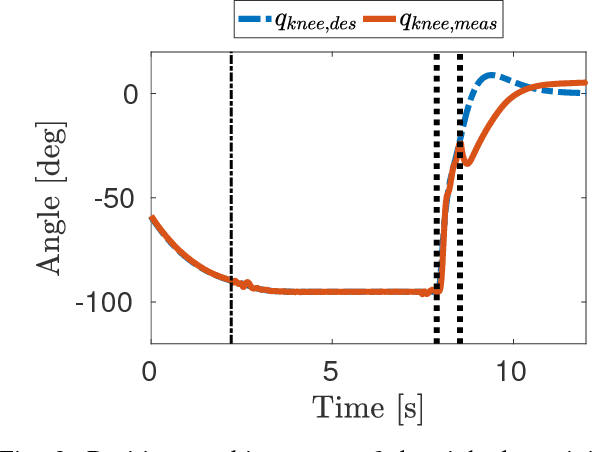
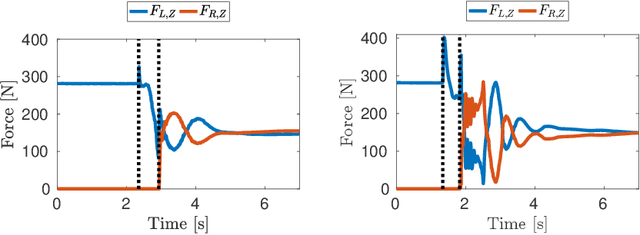
Torque-Controlled Stepping-Strategy Push Recovery: Design and Implementation on the iCub Humanoid Robot
May 30, 2017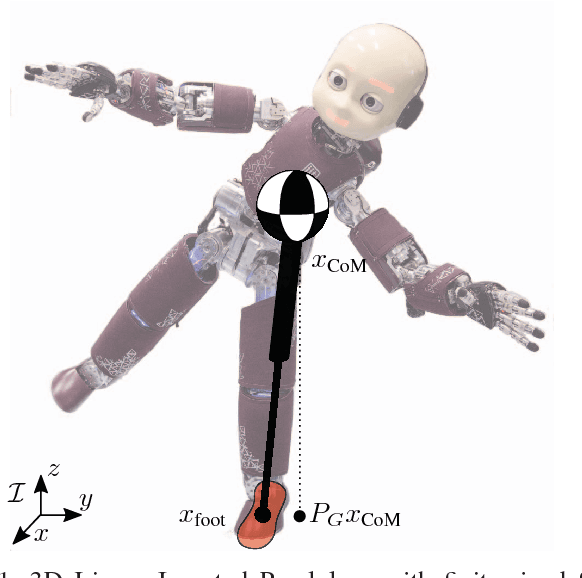
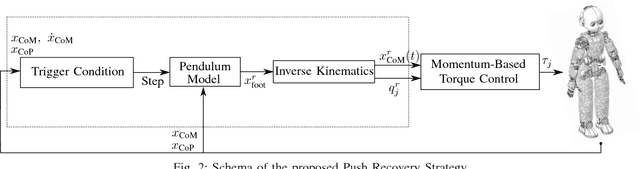
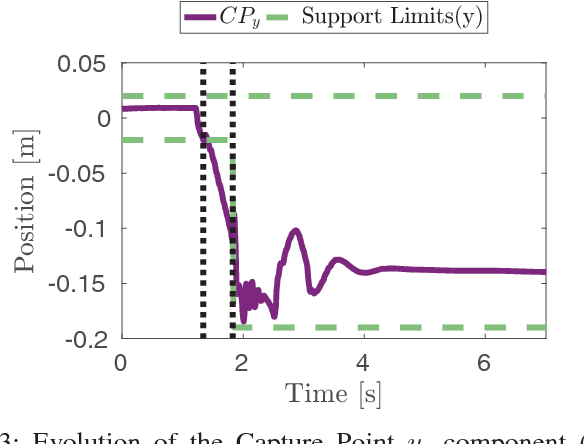
One of the challenges for the robotics community is to deploy robots which can reliably operate in real world scenarios together with humans. A crucial requirement for legged robots is the capability to properly balance on their feet, rejecting external disturbances. iCub is a state-of-the-art humanoid robot which has only recently started to balance on its feet. While the current balancing controller has proved successful in various scenarios, it still misses the capability to properly react to strong pushes by taking steps. This paper goes in this direction. It proposes and implements a control strategy based on the Capture Point concept [1]. Instead of relying on position control, like most of Capture Point related approaches, the proposed strategy generates references for the momentum-based torque controller already implemented on the iCub, thus extending its capabilities to react to external disturbances, while retaining the advantages of torque control when interacting with the environment. Experiments in the Gazebo simulator and on the iCub humanoid robot validate the proposed strategy.