 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample complexity of unbalanced entropic OT
Jun 23, 2026Optimal transport (OT) has become a central language for comparing probability measures, but exact balanced OT is often both too rigid for data with missing, created, or destroyed mass and subject to unfavorable high-dimensional sample complexity. Entropic regularization and unbalanced relaxations address these limitations in complementary ways. Entropy smooths the geometry, improves statistical behavior, and enables fast Sinkhorn-type algorithms, while unbalanced marginal penalties replace hard conservation constraints by divergence terms adapted to noisy empirical data. This paper studies the sample complexity of entropic unbalanced OT at the level of the optimal coupling, rather than only the scalar transport value. We develop a translation-invariant dual formulation, prove compactness and strong convexity properties for the intrinsic dual variables, and convert these geometric estimates into high-probability finite-sample bounds for empirical couplings. The results clarify why regularization is a practical necessity in machine learning applications: it softens the curse of dimensionality, reduces the number of samples needed for stable transport estimation, and keeps the resulting estimators compatible with scalable Sinkhorn-type solvers.
Optimal Transport under Group Fairness Constraints
Jan 12, 2026Ensuring fairness in matching algorithms is a key challenge in allocating scarce resources and positions. Focusing on Optimal Transport (OT), we introduce a novel notion of group fairness requiring that the probability of matching two individuals from any two given groups in the OT plan satisfies a predefined target. We first propose \texttt{FairSinkhorn}, a modified Sinkhorn algorithm to compute perfectly fair transport plans efficiently. Since exact fairness can significantly degrade matching quality in practice, we then develop two relaxation strategies. The first one involves solving a penalised OT problem, for which we derive novel finite-sample complexity guarantees. This result is of independent interest as it can be generalized to arbitrary convex penalties. Our second strategy leverages bilevel optimization to learn a ground cost that induces a fair OT solution, and we establish a bound guaranteeing that the learned cost yields fair matchings on unseen data. Finally, we present empirical results that illustrate the trade-offs between fairness and performance.
Learning from Samples: Inverse Problems over measures via Sharpened Fenchel-Young Losses
May 11, 2025



Estimating parameters from samples of an optimal probability distribution is essential in applications ranging from socio-economic modeling to biological system analysis. In these settings, the probability distribution arises as the solution to an optimization problem that captures either static interactions among agents or the dynamic evolution of a system over time. Our approach relies on minimizing a new class of loss functions, called sharpened Fenchel-Young losses, which measure the sub-optimality gap of the optimization problem over the space of measures. We study the stability of this estimation method when only a finite number of sample is available. The parameters to be estimated typically correspond to a cost function in static problems and to a potential function in dynamic problems. To analyze stability, we introduce a general methodology that leverages the strong convexity of the loss function together with the sample complexity of the forward optimization problem. Our analysis emphasizes two specific settings in the context of optimal transport, where our method provides explicit stability guarantees: The first is inverse unbalanced optimal transport (iUOT) with entropic regularization, where the parameters to estimate are cost functions that govern transport computations; this method has applications such as link prediction in machine learning. The second is inverse gradient flow (iJKO), where the objective is to recover a potential function that drives the evolution of a probability distribution via the Jordan-Kinderlehrer-Otto (JKO) time-discretization scheme; this is particularly relevant for understanding cell population dynamics in single-cell genomics. Finally, we validate our approach through numerical experiments on Gaussian distributions, where closed-form solutions are available, to demonstrate the practical performance of our methods
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018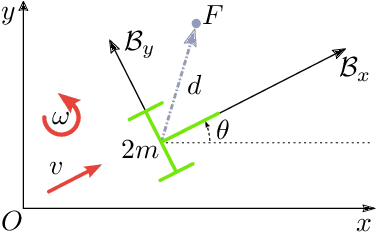
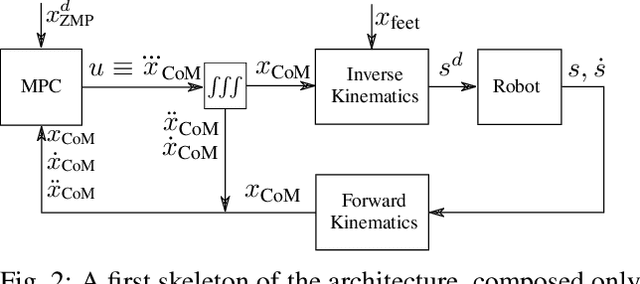
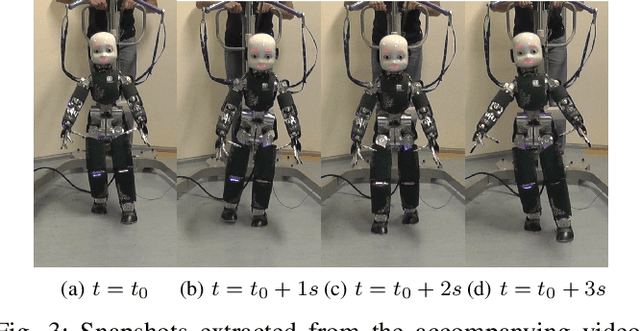
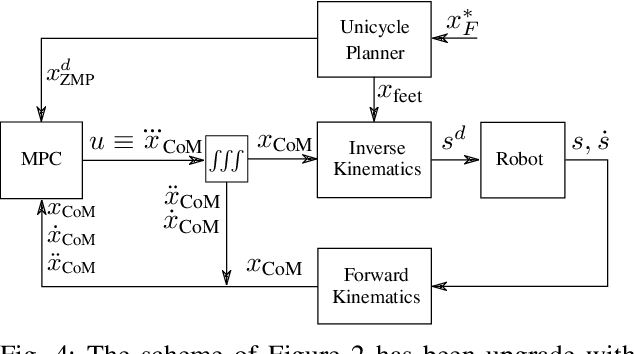
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.