 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Flexible MATLAB/Simulink Simulator for Robotic Floating-base Systems in Contact with the Ground
Nov 17, 2022Physics simulators are widely used in robotics fields, from mechanical design to dynamic simulation, and controller design. This paper presents an open-source MATLAB/Simulink simulator for rigid-body articulated systems, including manipulators and floating-base robots. Thanks to MATLAB/Simulink features like MATLAB system classes and Simulink function blocks, the presented simulator combines a programmatic and block-based approach, resulting in a flexible design in the sense that different parts, including its physics engine, robot-ground interaction model, and state evolution algorithm are simply accessible and editable. Moreover, through the use of Simulink dynamic mask blocks, the proposed simulation framework supports robot models integrating open-chain and closed-chain kinematics with any desired number of links interacting with the ground. The simulator can also integrate second-order actuator dynamics. Furthermore, the simulator benefits from a one-line installation and an easy-to-use Simulink interface.
Identification of Motor Parameters on Coupled Joints
Jun 12, 2019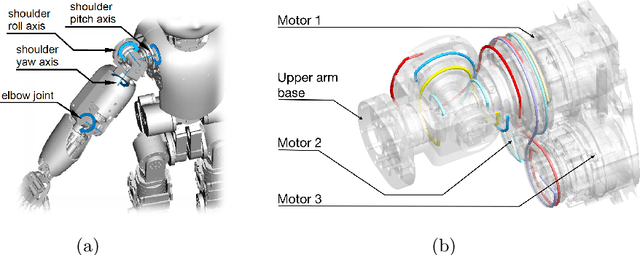
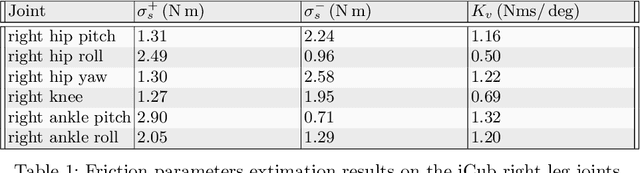
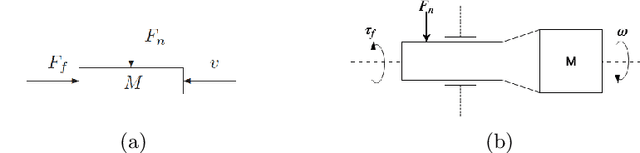
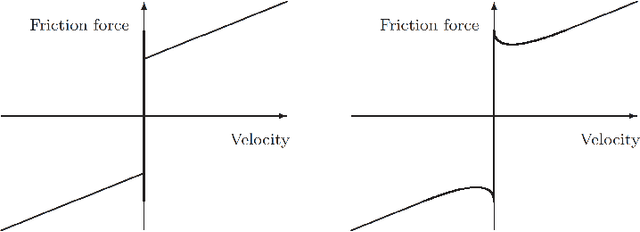
The estimation of the motor torque and friction parameters are crucial for implementing an efficient low level joint torque control. In a set of coupled joints, the actuators torques are mapped to the output joint torques through a coupling matrix, such that the motor torque and friction parameters appear entangled from the point of view of the joints. As a result, their identification is problematic when using the same methodology as for single joints. This paper proposes an identification method with an improved accuracy with respect to classical closed loop methods on coupled joints. The method stands out through the following key points: it is a direct open loop identification; it addresses separately each motor in the coupling; it accounts for the static friction in the actuation elements. The identified parameters should significantly improve the contribution of the feed-forward terms in the low level control of coupled joints with static friction.
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018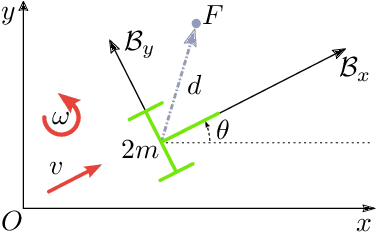
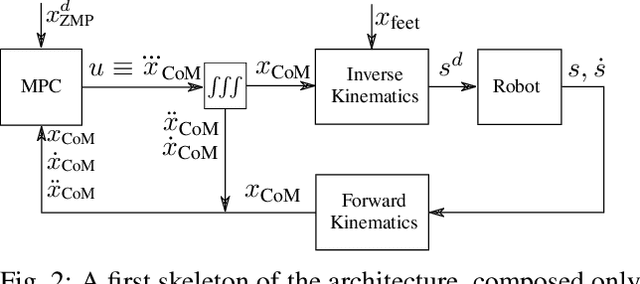
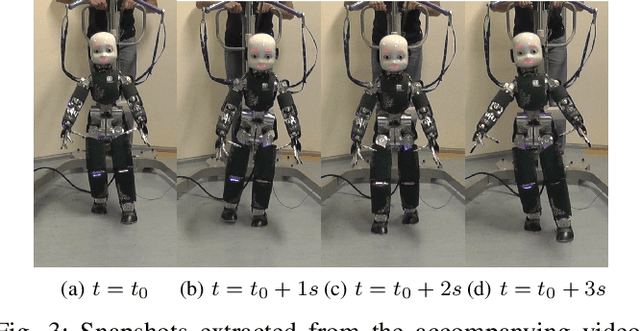
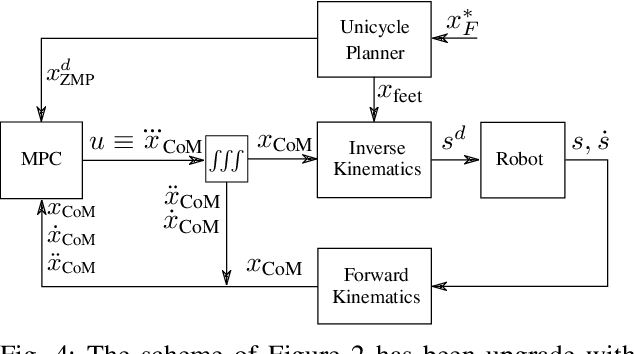
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.
Modeling and Control of Humanoid Robots in Dynamic Environments: iCub Balancing on a Seesaw
Mar 09, 2018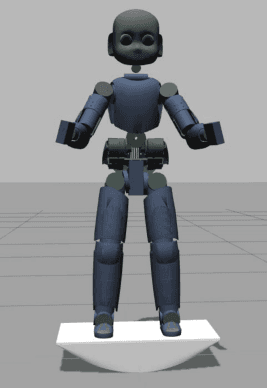
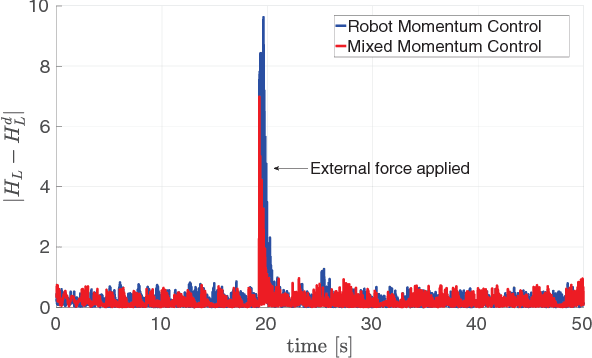
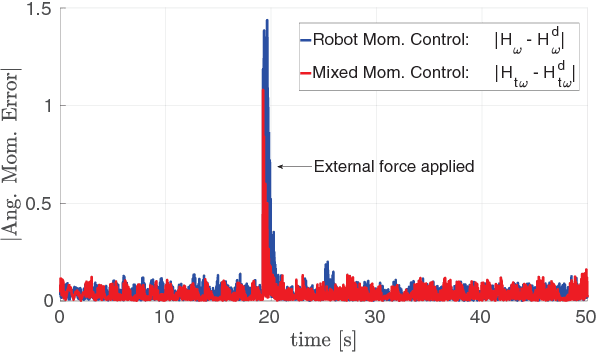
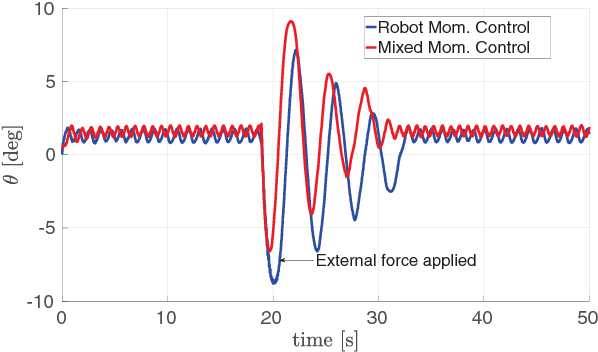
Forthcoming applications concerning humanoid robots may involve physical interaction between the robot and a dynamic environment. In such scenario, classical balancing and walking controllers that neglect the environment dynamics may not be sufficient for achieving a stable robot behavior. This paper presents a modeling and control framework for balancing humanoid robots in contact with a dynamic environment. We first model the robot and environment dynamics, together with the contact constraints. Then, a control strategy for stabilizing the full system is proposed. Theoretical results are verified in simulation with robot iCub balancing on a seesaw.