 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeiCub3 Avatar System
Mar 14, 2022
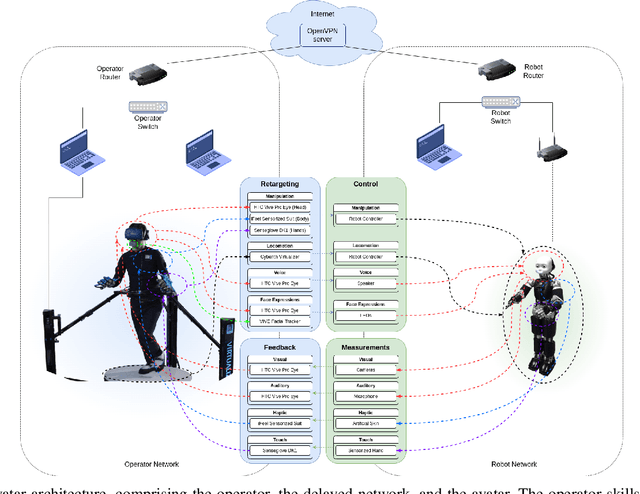
We present an avatar system that enables a human operator to visit a remote location via iCub3, a new humanoid robot developed at the Italian Institute of Technology (IIT) paving the way for the next generation of the iCub platforms. On the one hand, we present the humanoid iCub3 that plays the role of the robotic avatar. Particular attention is paid to the differences between iCub3 and the classical iCub humanoid robot. On the other hand, we present the set of technologies of the avatar system at the operator side. They are mainly composed of iFeel, namely, IIT lightweight non-invasive wearable devices for motion tracking and haptic feedback, and of non-IIT technologies designed for virtual reality ecosystems. Finally, we show the effectiveness of the avatar system by describing a demonstration involving a realtime teleoperation of the iCub3. The robot is located in Venice, Biennale di Venezia, while the human operator is at more than 290km distance and located in Genoa, IIT. Using a standard fiber optic internet connection, the avatar system transports the operator locomotion, manipulation, voice, and face expressions to the iCub3 with visual, auditory, haptic and touch feedback.
Online Non-linear Centroidal MPC for Humanoid Robot Locomotion with Step Adjustment
Mar 10, 2022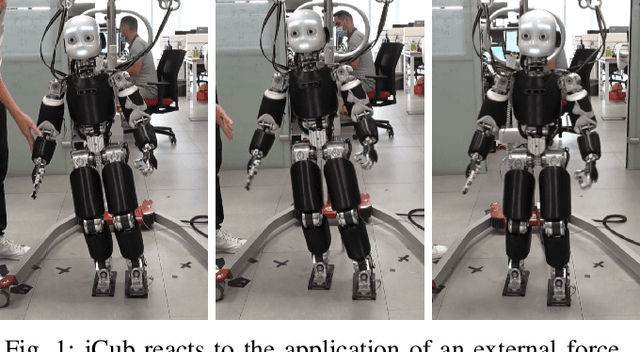

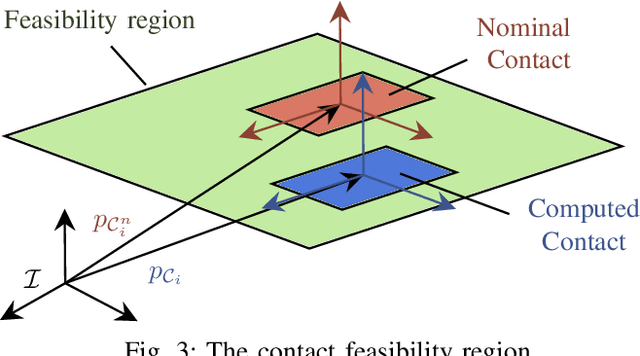
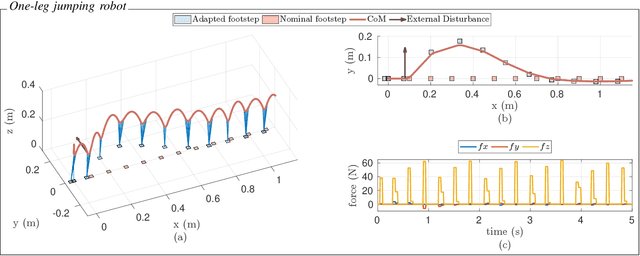
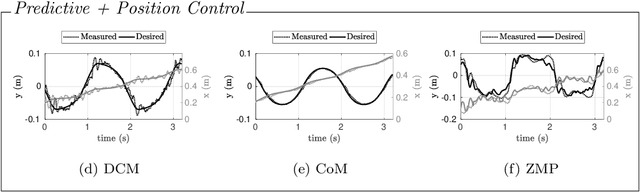
This paper presents a Non-Linear Model Predictive Controller for humanoid robot locomotion with online step adjustment capabilities. The proposed controller considers the Centroidal Dynamics of the system to compute the desired contact forces and torques and contact locations. Differently from bipedal walking architectures based on simplified models, the presented approach considers the reduced centroidal model, thus allowing the robot to perform highly dynamic movements while keeping the control problem still treatable online. We show that the proposed controller can automatically adjust the contact location both in single and double support phases. The overall approach is then tested with a simulation of one-leg and two-leg systems performing jumping and running tasks, respectively. We finally validate the proposed controller on the position-controlled Humanoid Robot iCub. Results show that the proposed strategy prevents the robot from falling while walking and pushed with external forces up to 40 Newton for 1 second applied at the robot arm.
* Paper accepted in ICRA 2022
DILIGENT-KIO: A Proprioceptive Base Estimator for Humanoid Robots using Extended Kalman Filtering on Matrix Lie Groups
May 31, 2021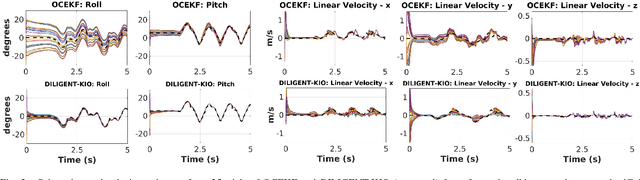
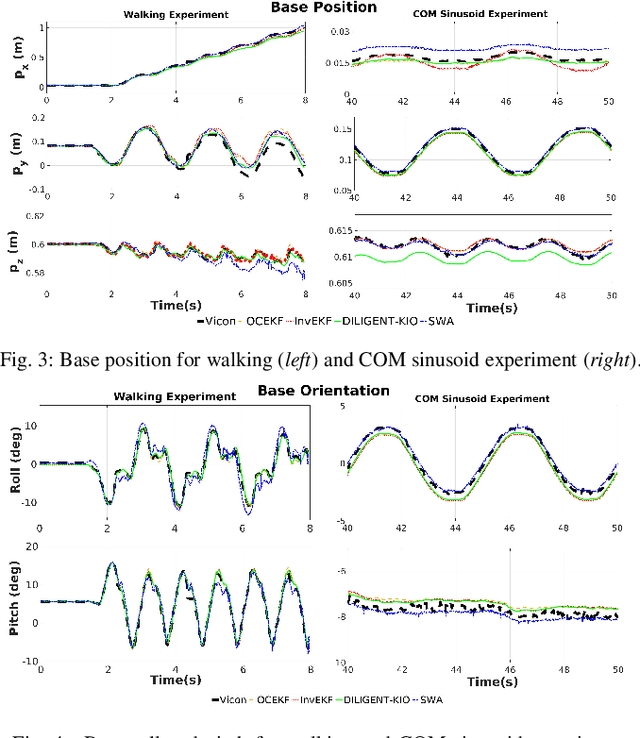


This paper presents a contact-aided inertial-kinematic floating base estimation for humanoid robots considering an evolution of the state and observations over matrix Lie groups. This is achieved through the application of a geometrically meaningful estimator which is characterized by concentrated Gaussian distributions. The configuration of a floating base system like a humanoid robot usually requires the knowledge of an additional six degrees of freedom which describes its base position-and-orientation. This quantity usually cannot be measured and needs to be estimated. A matrix Lie group, encapsulating the position-and-orientation and linear velocity of the base link, feet positions-and-orientations and Inertial Measurement Units' biases, is used to represent the state while relative positions-and-orientations of contact feet from forward kinematics are used as observations. The proposed estimator exhibits fast convergence for large initialization errors owing to choice of uncertainty parametrization. An experimental validation is done on the iCub humanoid platform.
Modeling of Visco-Elastic Environments for Humanoid Robot Motion Control
May 30, 2021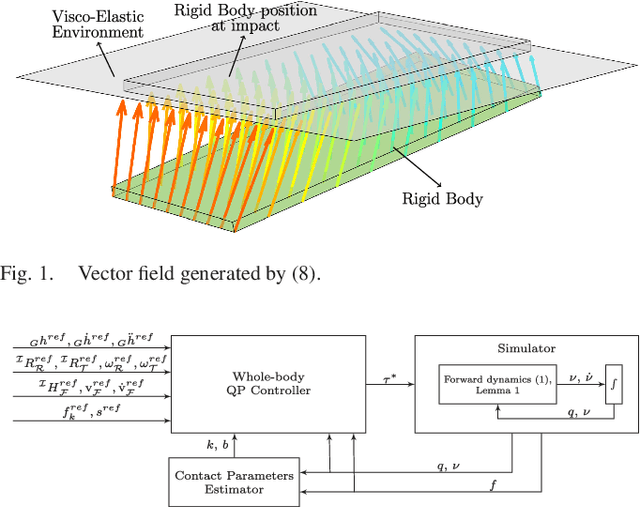

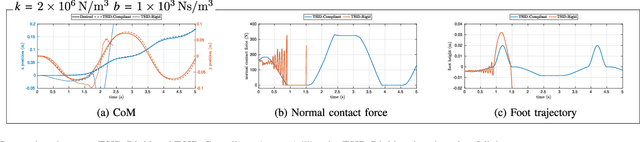

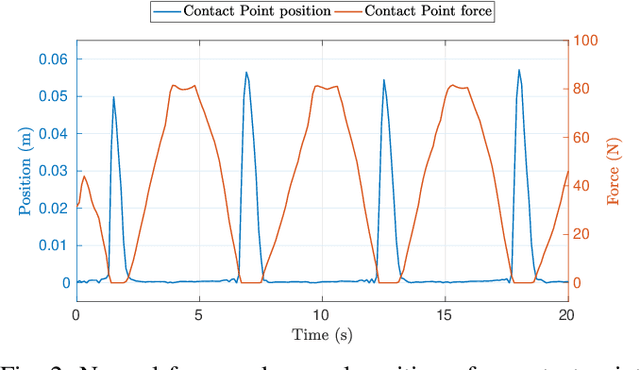
This manuscript presents a model of compliant contacts for time-critical humanoid robot motion control. The proposed model considers the environment as a continuum of spring-damper systems, which allows us to compute the equivalent contact force and torque that the environment exerts on the contact surface. We show that the proposed model extends the linear and rotational springs and dampers - classically used to characterize soft terrains - to the case of large contact surface orientations. The contact model is then used for the real-time whole-body control of humanoid robots walking on visco-elastic environments. The overall approach is validated by simulating walking motions of the iCub humanoid robot. Furthermore, the paper compares the proposed whole-body control strategy and state of the art approaches. In this respect, we investigate the terrain compliance that makes the classical approaches assuming rigid contacts fail. We finally analyze the robustness of the presented control design with respect to non-parametric uncertainty in the contact-model.
Non-Linear Trajectory Optimization for Large Step-Ups: Application to the Humanoid Robot Atlas
Apr 25, 2020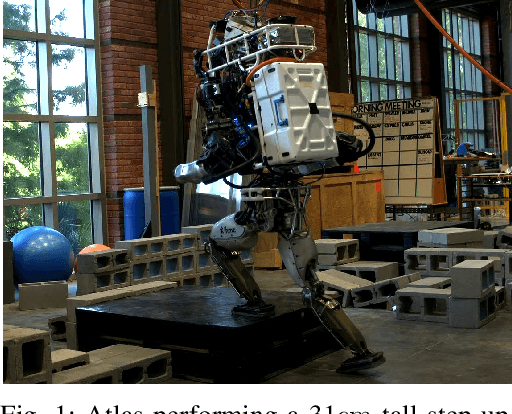
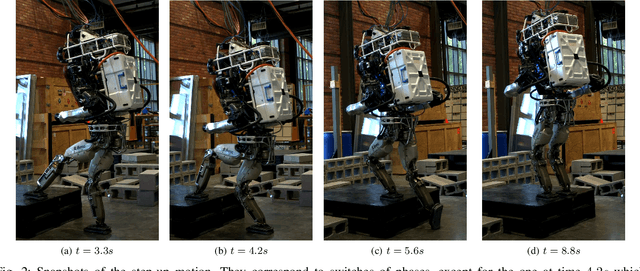
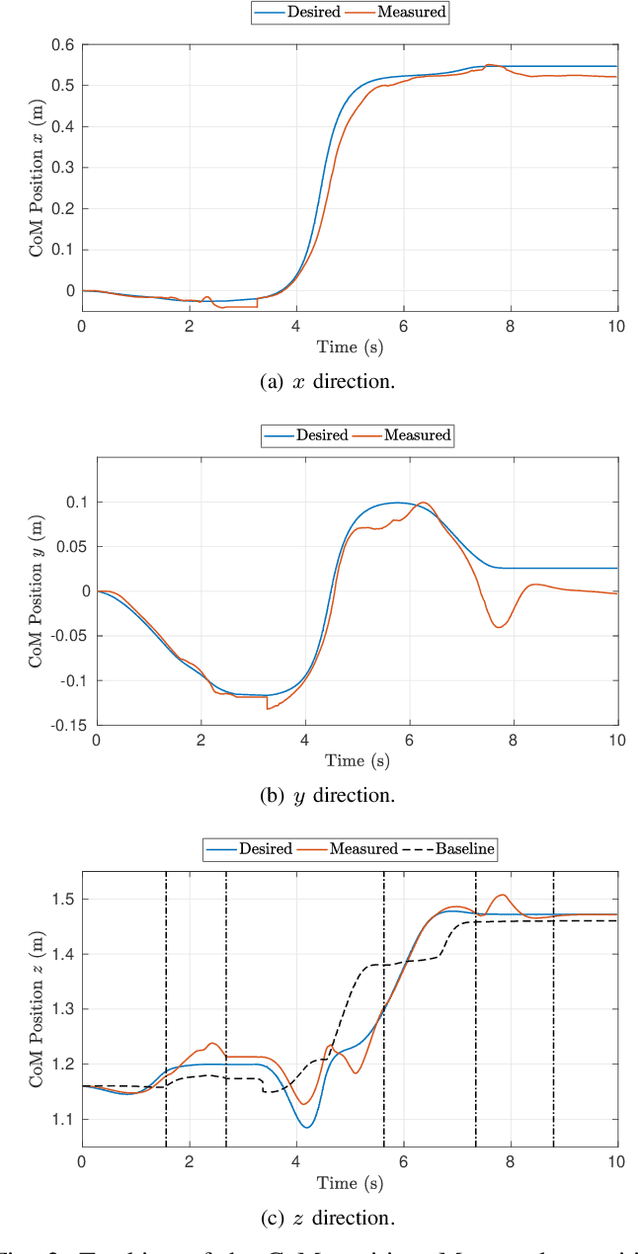
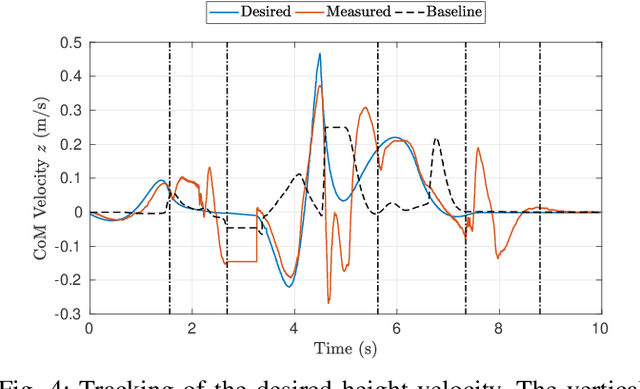
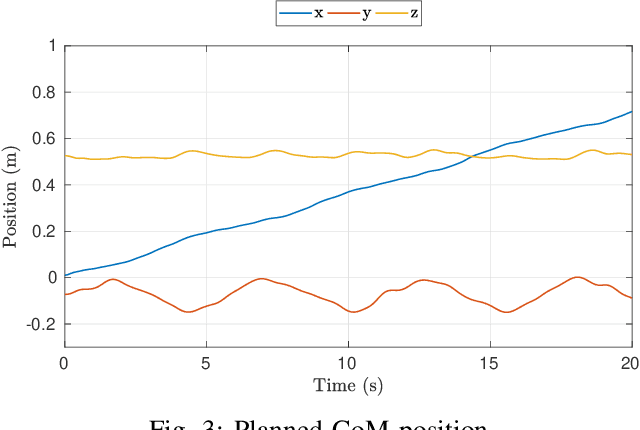
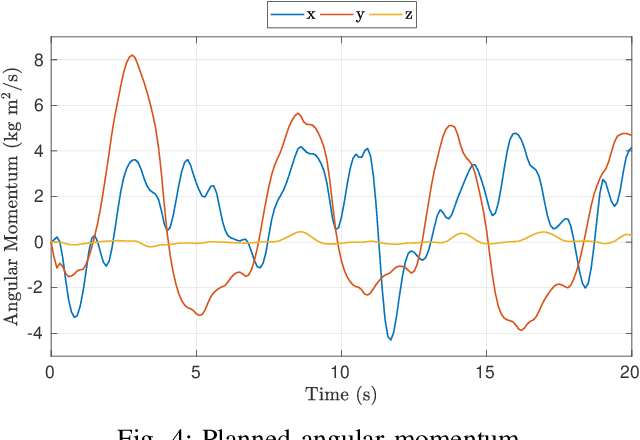
Performing large step-ups is a challenging task for a humanoid robot. It requires the robot to perform motions at the limit of its reachable workspace while straining to move its body upon the obstacle. This paper presents a non-linear trajectory optimization method for generating step-up motions. We adopt a simplified model of the centroidal dynamics to generate feasible Center of Mass trajectories aimed at reducing the torques required for the step-up motion. The activation and deactivation of contacts at both feet are considered explicitly. The output of the planner is a Center of Mass trajectory plus an optimal duration for each walking phase. These desired values are stabilized by a whole-body controller that determines a set of desired joint torques. We experimentally demonstrate that by using trajectory optimization techniques, the maximum torque required to the full-size humanoid robot Atlas can be reduced up to 20% when performing a step-up motion.
Predictive Whole-Body Control of Humanoid Robot Locomotion
Apr 16, 2020



Humanoid robots are machines built with an anthropomorphic shape. Despite decades of research into the subject, it is still challenging to tackle the robot locomotion problem from an algorithmic point of view. For example, these machines cannot achieve a constant forward body movement without exploiting contacts with the environment. The reactive forces resulting from the contacts are subject to strong limitations, complicating the design of control laws. As a consequence, the generation of humanoid motions requires to exploit fully the mathematical model of the robot in contact with the environment or to resort to approximations of it. This thesis investigates predictive and optimal control techniques for tackling humanoid robot motion tasks. They generate control input values from the system model and objectives, often transposed as cost function to minimize. In particular, this thesis tackles several aspects of the humanoid robot locomotion problem in a crescendo of complexity. First, we consider the single step push recovery problem. Namely, we aim at maintaining the upright posture with a single step after a strong external disturbance. Second, we generate and stabilize walking motions. In addition, we adopt predictive techniques to perform more dynamic motions, like large step-ups. The above-mentioned applications make use of different simplifications or assumptions to facilitate the tractability of the corresponding motion tasks. Moreover, they consider first the foot placements and only afterward how to maintain balance. We attempt to remove all these simplifications. [continued]
Whole-Body Walking Generation using Contact Parametrization: A Non-Linear Trajectory Optimization Approach
Mar 10, 2020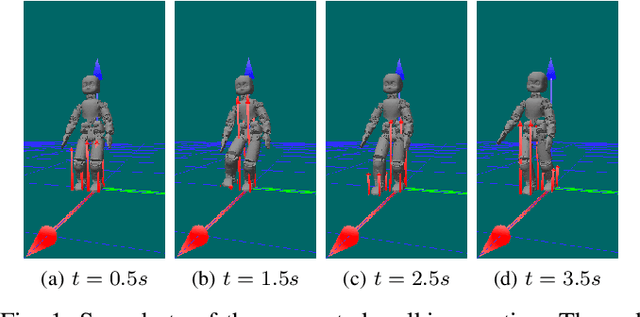
In this paper, we describe a planner capable of generating walking trajectories by using the centroidal dynamics and the full kinematics of a humanoid robot model. The interaction between the robot and the walking surface is modeled explicitly through a novel contact parametrization. The approach is complementarity-free and does not need a predefined contact sequence. By solving an optimal control problem we obtain walking trajectories. In particular, through a set of constraints and dynamic equations, we model the robot in contact with the ground. We describe the objective the robot needs to achieve with a set of tasks. The whole optimal control problem is transcribed into an optimization problem via a Direct Multiple Shooting approach and solved with an off-the-shelf solver. We show that it is possible to achieve walking motions automatically by specifying a minimal set of references, such as a constant desired Center of Mass velocity and a reference point on the ground.
A Benchmarking of DCM Based Architectures for Position, Velocity and Torque Controlled Humanoid Robots
Nov 27, 2019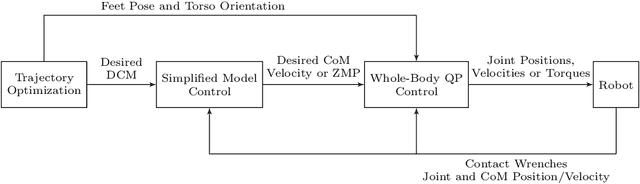


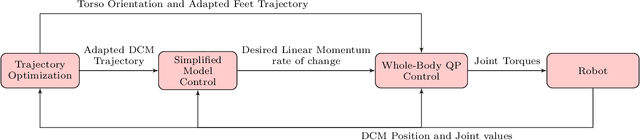
This paper contributes towards the benchmarking of control architectures for bipedal robot locomotion. It considers architectures that are based on the Divergent Component of Motion (DCM) and composed of three main layers: trajectory optimization, simplified model control, and whole-body QP control layer. While the first two layers use simplified robot models, the whole-body QP control layer uses a complete robot model to produce either desired positions, velocities, or torques inputs at the joint-level. This paper then compares two implementations of the simplified model control layer, which are tested with position, velocity, and torque control modes for the whole-body QP control layer. In particular, both an instantaneous and a Receding Horizon controller are presented for the simplified model control layer. We show also that one of the proposed architectures allows the humanoid robot iCub to achieve a forward walking velocity of 0.3372 meters per second, which is the highest walking velocity achieved by the iCub robot.
Online DCM Trajectory Generation for Push Recovery of Torque-Controlled Humanoid Robots
Oct 14, 2019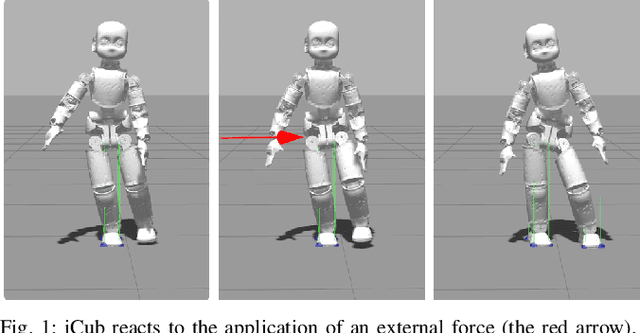
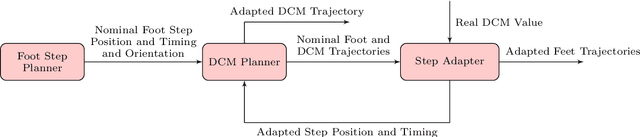
We present a computationally efficient method for online planning of bipedal walking trajectories with push recovery. In particular, the proposed methodology fits control architectures where the Divergent-Component-of-Motion (DCM) is planned beforehand, and adds a step adapter to adjust the planned trajectories and achieve push recovery. Assuming that the robot is in a single support state, the step adapter generates new positions and timings for the next step. The step adapter is active in single support phases only, but the proposed torque-control architecture considers double support phases too. The key idea for the design of the step adapter is to impose both initial and final DCM step values using an exponential interpolation of the time varying ZMP trajectory.This allows us to cast the push recovery problem as a Quadratic Programming (QP) one, and to solve it online with state-of-the-art optimisers. The overall approach is validated with simulations of the torque-controlled 33 kg humanoid robot iCub. Results show that the proposed strategy prevents the humanoid robot from falling while walking at 0.28 m/s and pushed with external forces up to 150 Newton for 0.05 seconds.
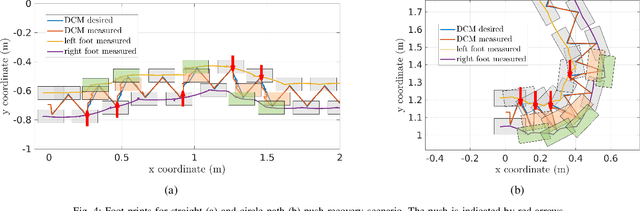
Telexistence and Teleoperation for Walking Humanoid Robots
Apr 04, 2019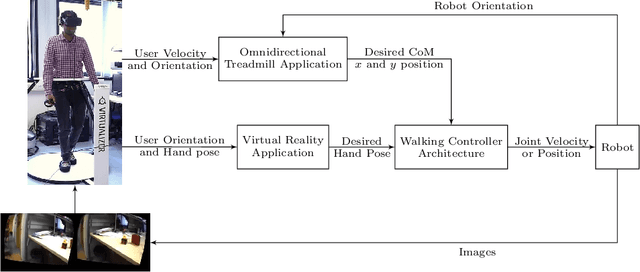
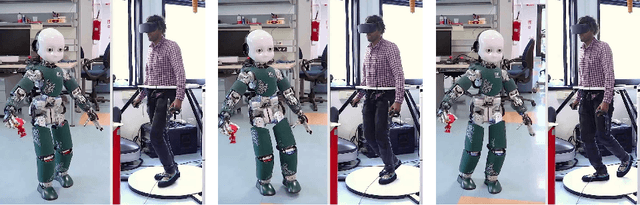
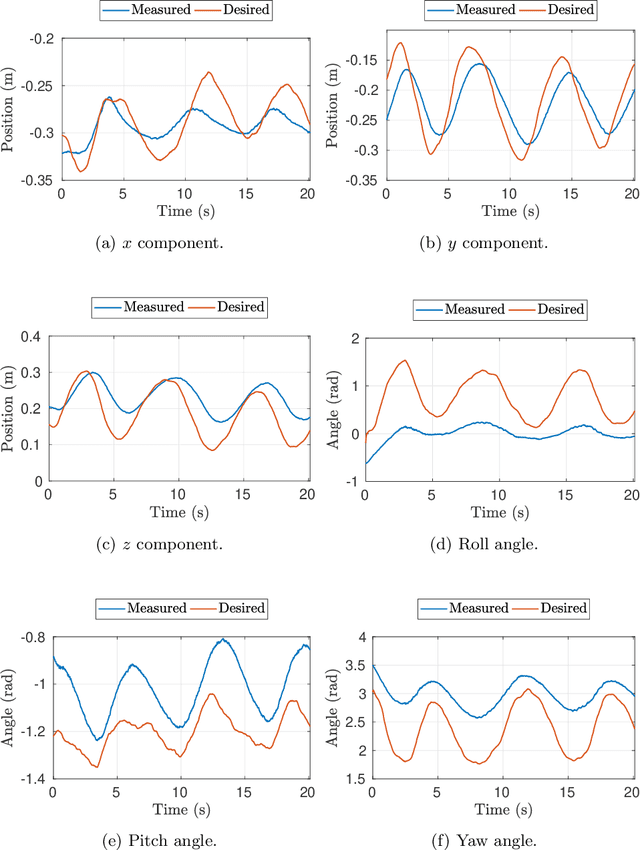
This paper proposes an architecture for achieving telexistence and teleoperation of humanoid robots. The architecture combines several technological set-ups, methodologies, locomotion and manipulation algorithms in a novel manner, thus building upon and extending works available in literature. The approach allows a human operator to command and telexist with the robot. Therefore, in this work we treat aspects pertaining not only to the proposed architecture structure and implementation, but also the human operator experience in terms of ability to adapt to the robot and to the architecture. Also the proprioception aspects and embodiment of the robot are studied through specific experimental results, which are also treated in a somewhat formal, albeit high-level manner. Application of the proposed architecture and experiments incorporating user training and experience are addressed using an illustrative bipedal humanoid robot, namely the iCub robot.