 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comedy of Estimators: On KL Regularization in RL Training of LLMs
Dec 26, 2025The reasoning performance of large language models (LLMs) can be substantially improved by training them with reinforcement learning (RL). The RL objective for LLM training involves a regularization term, which is the reverse Kullback-Leibler (KL) divergence between the trained policy and the reference policy. Since computing the KL divergence exactly is intractable, various estimators are used in practice to estimate it from on-policy samples. Despite its wide adoption, including in several open-source libraries, there is no systematic study analyzing the numerous ways of incorporating KL estimators in the objective and their effect on the downstream performance of RL-trained models. Recent works show that prevailing practices for incorporating KL regularization do not provide correct gradients for stated objectives, creating a discrepancy between the objective and its implementation. In this paper, we further analyze these practices and study the gradients of several estimators configurations, revealing how design choices shape gradient bias. We substantiate these findings with empirical observations by RL fine-tuning \texttt{Qwen2.5-7B}, \texttt{Llama-3.1-8B-Instruct} and \texttt{Qwen3-4B-Instruct-2507} with different configurations and evaluating their performance on both in- and out-of-distribution tasks. Through our analysis, we observe that, in on-policy settings: (1) estimator configurations with biased gradients can result in training instabilities; and (2) using estimator configurations resulting in unbiased gradients leads to better performance on in-domain as well as out-of-domain tasks. We also investigate the performance resulting from different KL configurations in off-policy settings and observe that KL regularization can help stabilize off-policy RL training resulting from asynchronous setups.
Recursive Self-Aggregation Unlocks Deep Thinking in Large Language Models
Sep 30, 2025Test-time scaling methods improve the capabilities of large language models (LLMs) by increasing the amount of compute used during inference to make a prediction. Inference-time compute can be scaled in parallel by choosing among multiple independent solutions or sequentially through self-refinement. We propose Recursive Self-Aggregation (RSA), a test-time scaling method inspired by evolutionary methods that combines the benefits of both parallel and sequential scaling. Each step of RSA refines a population of candidate reasoning chains through aggregation of subsets to yield a population of improved solutions, which are then used as the candidate pool for the next iteration. RSA exploits the rich information embedded in the reasoning chains -- not just the final answers -- and enables bootstrapping from partially correct intermediate steps within different chains of thought. Empirically, RSA delivers substantial performance gains with increasing compute budgets across diverse tasks, model families and sizes. Notably, RSA enables Qwen3-4B-Instruct-2507 to achieve competitive performance with larger reasoning models, including DeepSeek-R1 and o3-mini (high), while outperforming purely parallel and sequential scaling strategies across AIME-25, HMMT-25, Reasoning Gym, LiveCodeBench-v6, and SuperGPQA. We further demonstrate that training the model to combine solutions via a novel aggregation-aware reinforcement learning approach yields significant performance gains. Code available at https://github.com/HyperPotatoNeo/RSA.
Trajectory Balance with Asynchrony: Decoupling Exploration and Learning for Fast, Scalable LLM Post-Training
Mar 24, 2025Reinforcement learning (RL) is a critical component of large language model (LLM) post-training. However, existing on-policy algorithms used for post-training are inherently incompatible with the use of experience replay buffers, which can be populated scalably by distributed off-policy actors to enhance exploration as compute increases. We propose efficiently obtaining this benefit of replay buffers via Trajectory Balance with Asynchrony (TBA), a massively scalable LLM RL system. In contrast to existing approaches, TBA uses a larger fraction of compute on search, constantly generating off-policy data for a central replay buffer. A training node simultaneously samples data from this buffer based on reward or recency to update the policy using Trajectory Balance (TB), a diversity-seeking RL objective introduced for GFlowNets. TBA offers three key advantages: (1) decoupled training and search, speeding up training wall-clock time by 4x or more; (2) improved diversity through large-scale off-policy sampling; and (3) scalable search for sparse reward settings. On mathematical reasoning, preference-tuning, and automated red-teaming (diverse and representative post-training tasks), TBA produces speed and performance improvements over strong baselines.
Solving Bayesian inverse problems with diffusion priors and off-policy RL
Mar 12, 2025This paper presents a practical application of Relative Trajectory Balance (RTB), a recently introduced off-policy reinforcement learning (RL) objective that can asymptotically solve Bayesian inverse problems optimally. We extend the original work by using RTB to train conditional diffusion model posteriors from pretrained unconditional priors for challenging linear and non-linear inverse problems in vision, and science. We use the objective alongside techniques such as off-policy backtracking exploration to improve training. Importantly, our results show that existing training-free diffusion posterior methods struggle to perform effective posterior inference in latent space due to inherent biases.
Outsourced diffusion sampling: Efficient posterior inference in latent spaces of generative models
Feb 10, 2025



Any well-behaved generative model over a variable $\mathbf{x}$ can be expressed as a deterministic transformation of an exogenous ('outsourced') Gaussian noise variable $\mathbf{z}$: $\mathbf{x}=f_\theta(\mathbf{z})$. In such a model (e.g., a VAE, GAN, or continuous-time flow-based model), sampling of the target variable $\mathbf{x} \sim p_\theta(\mathbf{x})$ is straightforward, but sampling from a posterior distribution of the form $p(\mathbf{x}\mid\mathbf{y}) \propto p_\theta(\mathbf{x})r(\mathbf{x},\mathbf{y})$, where $r$ is a constraint function depending on an auxiliary variable $\mathbf{y}$, is generally intractable. We propose to amortize the cost of sampling from such posterior distributions with diffusion models that sample a distribution in the noise space ($\mathbf{z}$). These diffusion samplers are trained by reinforcement learning algorithms to enforce that the transformed samples $f_\theta(\mathbf{z})$ are distributed according to the posterior in the data space ($\mathbf{x}$). For many models and constraints of interest, the posterior in the noise space is smoother than the posterior in the data space, making it more amenable to such amortized inference. Our method enables conditional sampling under unconditional GAN, (H)VAE, and flow-based priors, comparing favorably both with current amortized and non-amortized inference methods. We demonstrate the proposed outsourced diffusion sampling in several experiments with large pretrained prior models: conditional image generation, reinforcement learning with human feedback, and protein structure generation.
Amortizing intractable inference in diffusion models for vision, language, and control
May 31, 2024



Diffusion models have emerged as effective distribution estimators in vision, language, and reinforcement learning, but their use as priors in downstream tasks poses an intractable posterior inference problem. This paper studies amortized sampling of the posterior over data, $\mathbf{x}\sim p^{\rm post}(\mathbf{x})\propto p(\mathbf{x})r(\mathbf{x})$, in a model that consists of a diffusion generative model prior $p(\mathbf{x})$ and a black-box constraint or likelihood function $r(\mathbf{x})$. We state and prove the asymptotic correctness of a data-free learning objective, relative trajectory balance, for training a diffusion model that samples from this posterior, a problem that existing methods solve only approximately or in restricted cases. Relative trajectory balance arises from the generative flow network perspective on diffusion models, which allows the use of deep reinforcement learning techniques to improve mode coverage. Experiments illustrate the broad potential of unbiased inference of arbitrary posteriors under diffusion priors: in vision (classifier guidance), language (infilling under a discrete diffusion LLM), and multimodal data (text-to-image generation). Beyond generative modeling, we apply relative trajectory balance to the problem of continuous control with a score-based behavior prior, achieving state-of-the-art results on benchmarks in offline reinforcement learning.
Reasoning with Latent Diffusion in Offline Reinforcement Learning
Sep 12, 2023



Offline reinforcement learning (RL) holds promise as a means to learn high-reward policies from a static dataset, without the need for further environment interactions. However, a key challenge in offline RL lies in effectively stitching portions of suboptimal trajectories from the static dataset while avoiding extrapolation errors arising due to a lack of support in the dataset. Existing approaches use conservative methods that are tricky to tune and struggle with multi-modal data (as we show) or rely on noisy Monte Carlo return-to-go samples for reward conditioning. In this work, we propose a novel approach that leverages the expressiveness of latent diffusion to model in-support trajectory sequences as compressed latent skills. This facilitates learning a Q-function while avoiding extrapolation error via batch-constraining. The latent space is also expressive and gracefully copes with multi-modal data. We show that the learned temporally-abstract latent space encodes richer task-specific information for offline RL tasks as compared to raw state-actions. This improves credit assignment and facilitates faster reward propagation during Q-learning. Our method demonstrates state-of-the-art performance on the D4RL benchmarks, particularly excelling in long-horizon, sparse-reward tasks.
MLNav: Learning to Safely Navigate on Martian Terrains
Mar 09, 2022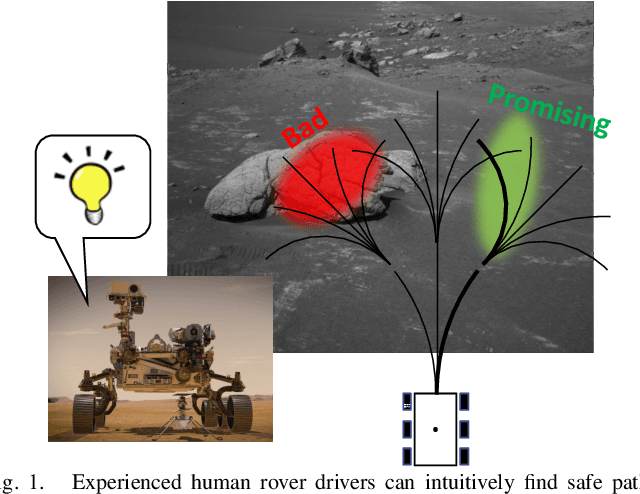
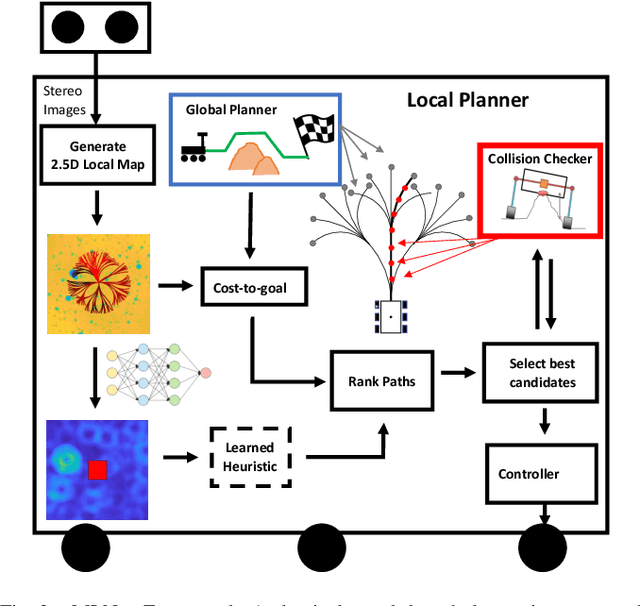
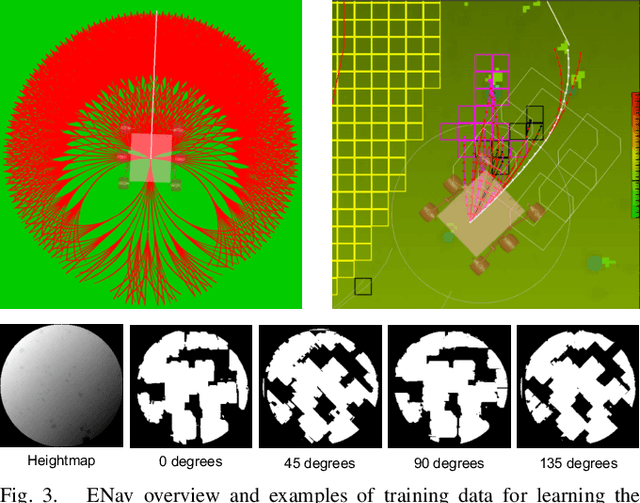
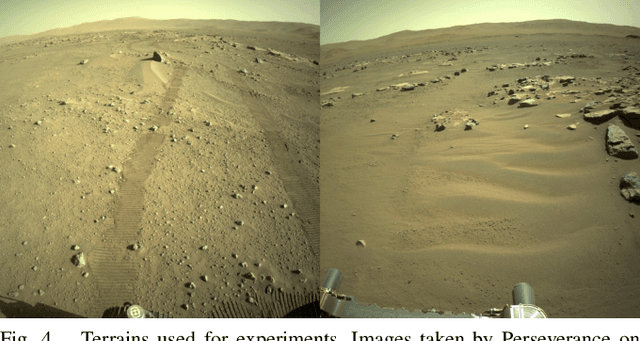
We present MLNav, a learning-enhanced path planning framework for safety-critical and resource-limited systems operating in complex environments, such as rovers navigating on Mars. MLNav makes judicious use of machine learning to enhance the efficiency of path planning while fully respecting safety constraints. In particular, the dominant computational cost in such safety-critical settings is running a model-based safety checker on the proposed paths. Our learned search heuristic can simultaneously predict the feasibility for all path options in a single run, and the model-based safety checker is only invoked on the top-scoring paths. We validate in high-fidelity simulations using both real Martian terrain data collected by the Perseverance rover, as well as a suite of challenging synthetic terrains. Our experiments show that: (i) compared to the baseline ENav path planner on board the Perserverance rover, MLNav can provide a significant improvement in multiple key metrics, such as a 10x reduction in collision checks when navigating real Martian terrains, despite being trained with synthetic terrains; and (ii) MLNav can successfully navigate highly challenging terrains where the baseline ENav fails to find a feasible path before timing out.
Machine Learning Based Path Planning for Improved Rover Navigation (Pre-Print Version)
Nov 11, 2020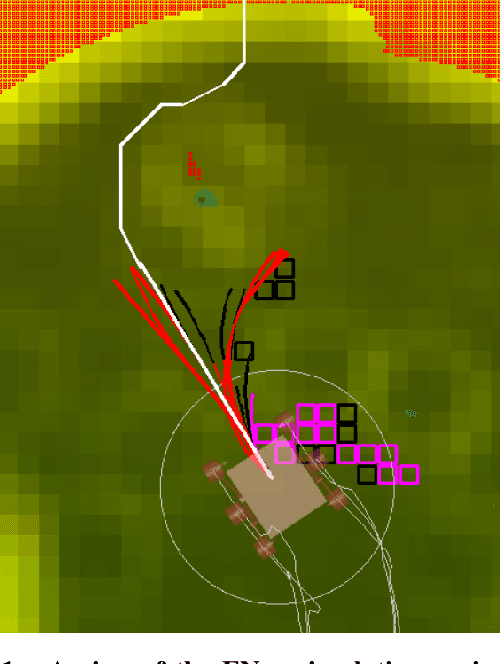
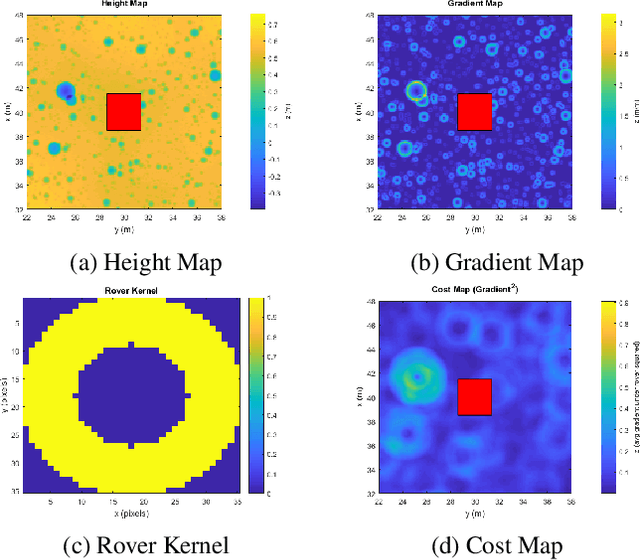
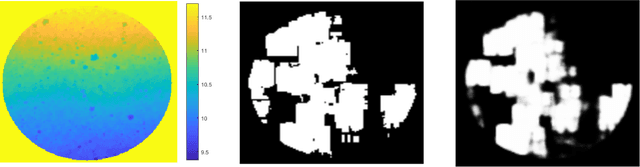
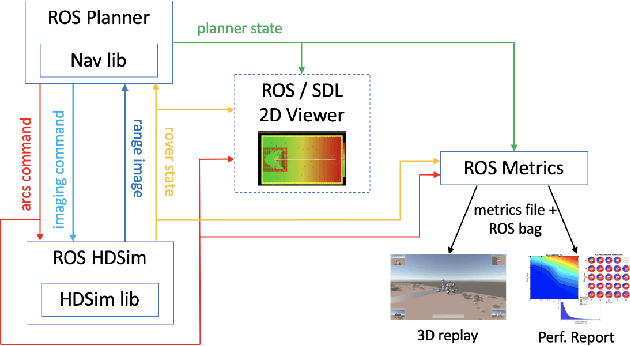
Enhanced AutoNav (ENav), the baseline surface navigation software for NASA's Perseverance rover, sorts a list of candidate paths for the rover to traverse, then uses the Approximate Clearance Evaluation (ACE) algorithm to evaluate whether the most highly ranked paths are safe. ACE is crucial for maintaining the safety of the rover, but is computationally expensive. If the most promising candidates in the list of paths are all found to be infeasible, ENav must continue to search the list and run time-consuming ACE evaluations until a feasible path is found. In this paper, we present two heuristics that, given a terrain heightmap around the rover, produce cost estimates that more effectively rank the candidate paths before ACE evaluation. The first heuristic uses Sobel operators and convolution to incorporate the cost of traversing high-gradient terrain. The second heuristic uses a machine learning (ML) model to predict areas that will be deemed untraversable by ACE. We used physics simulations to collect training data for the ML model and to run Monte Carlo trials to quantify navigation performance across a variety of terrains with various slopes and rock distributions. Compared to ENav's baseline performance, integrating the heuristics can lead to a significant reduction in ACE evaluations and average computation time per planning cycle, increase path efficiency, and maintain or improve the rate of successful traverses. This strategy of targeting specific bottlenecks with ML while maintaining the original ACE safety checks provides an example of how ML can be infused into planetary science missions and other safety-critical software.