 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGLAD: Grounded Layered Autonomous Driving for Complex Service Tasks
Oct 05, 2022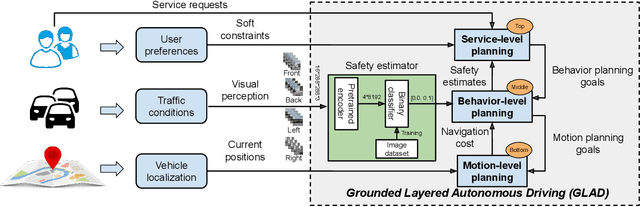
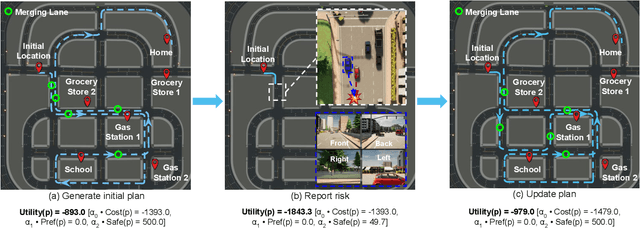
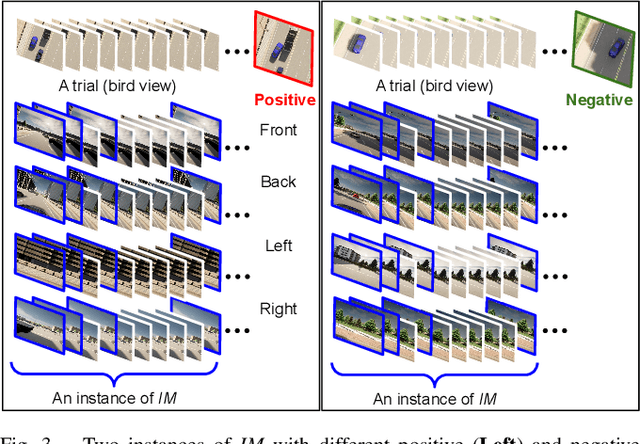
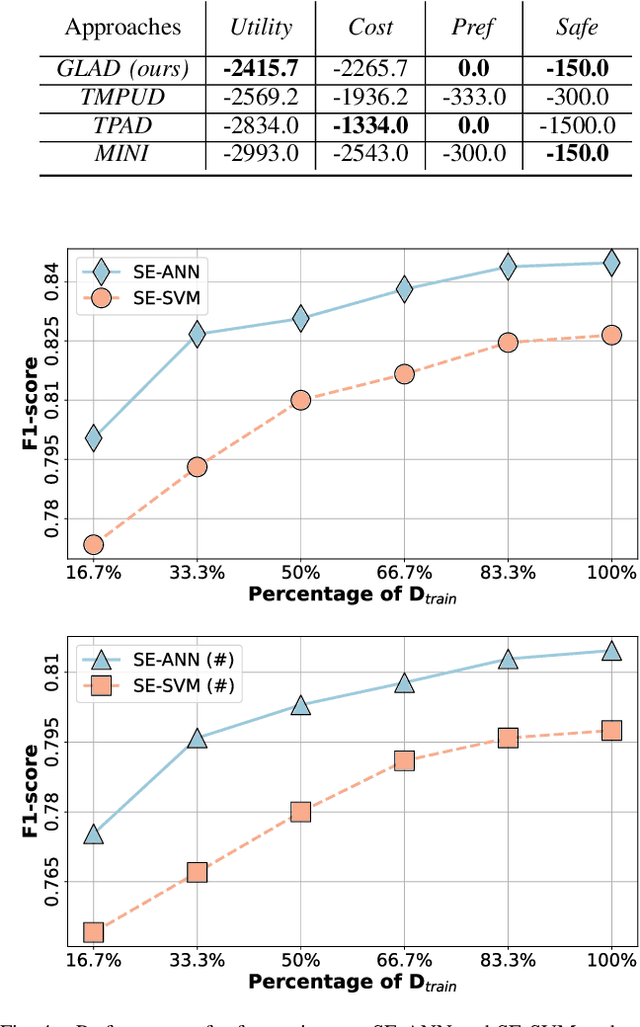
Given the current point-to-point navigation capabilities of autonomous vehicles, researchers are looking into complex service requests that require the vehicles to visit multiple points of interest. In this paper, we develop a layered planning framework, called GLAD, for complex service requests in autonomous urban driving. There are three layers for service-level, behavior-level, and motion-level planning. The layered framework is unique in its tight coupling, where the different layers communicate user preferences, safety estimates, and motion costs for system optimization. GLAD is visually grounded by perceptual learning from a dataset of 13.8k instances collected from driving behaviors. GLAD enables autonomous vehicles to efficiently and safely fulfill complex service requests. Experimental results from abstract and full simulation show that our system outperforms a few competitive baselines from the literature.
Robot Task Planning and Situation Handling in Open Worlds
Oct 04, 2022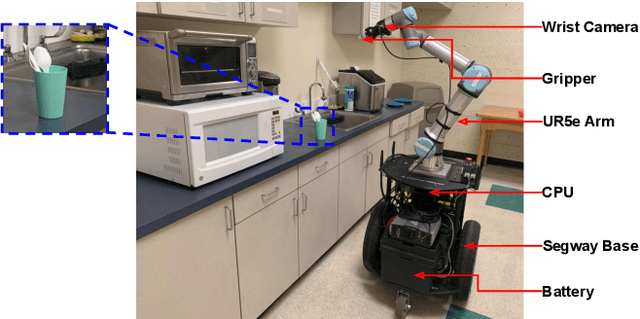
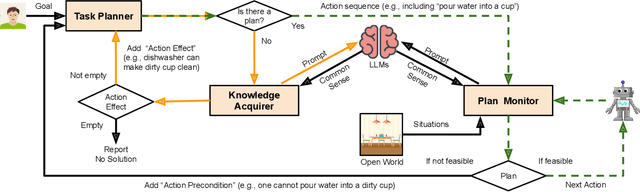
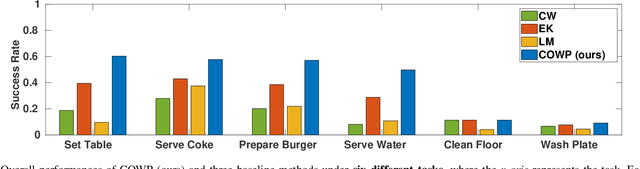
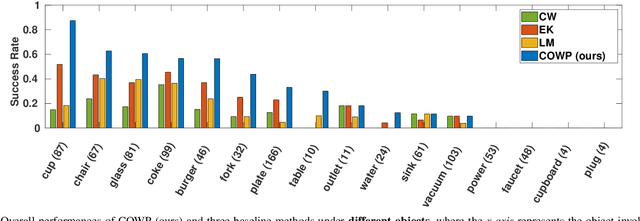
Automated task planning algorithms have been developed to help robots complete complex tasks that require multiple actions. Most of those algorithms have been developed for "closed worlds" assuming complete world knowledge is provided. However, the real world is generally open, and the robots frequently encounter unforeseen situations that can potentially break the planner's completeness. This paper introduces a novel algorithm (COWP) for open-world task planning and situation handling that dynamically augments the robot's action knowledge with task-oriented common sense. In particular, common sense is extracted from Large Language Models based on the current task at hand and robot skills. For systematic evaluations, we collected a dataset that includes 561 execution-time situations in a dining domain, where each situation corresponds to a state instance of a robot being potentially unable to complete a task using a solution that normally works. Experimental results show that our approach significantly outperforms competitive baselines from the literature in the success rate of service tasks. Additionally, we have demonstrated COWP using a mobile manipulator. Supplementary materials are available at: https://cowplanning.github.io/
Residual Graph Convolutional Recurrent Networks For Multi-step Traffic Flow Forecasting
May 03, 2022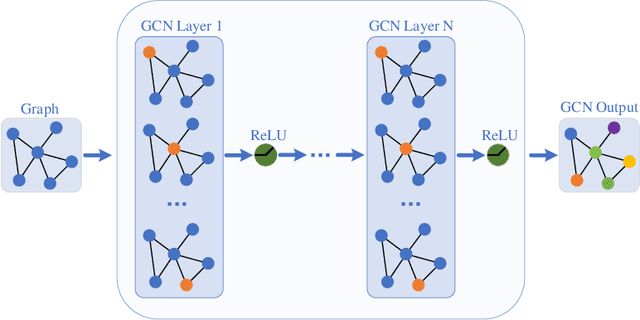

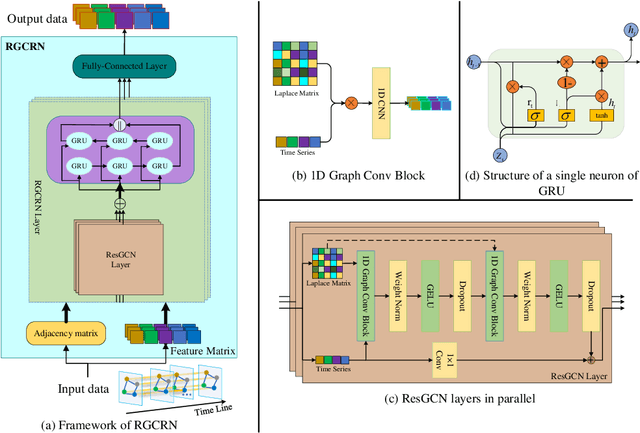
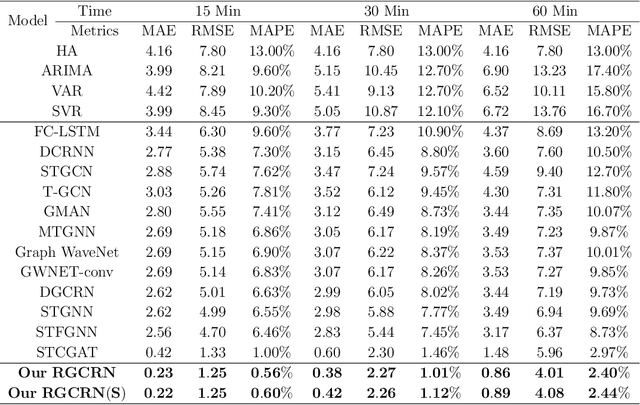
Traffic flow forecasting is essential for traffic planning, control and management. The main challenge of traffic forecasting tasks is accurately capturing traffic networks' spatial and temporal correlation. Although there are many traffic forecasting methods, most of them still have limitations in capturing spatial and temporal correlations. To improve traffic forecasting accuracy, we propose a new Spatial-temporal forecasting model, namely the Residual Graph Convolutional Recurrent Network (RGCRN). The model uses our proposed Residual Graph Convolutional Network (ResGCN) to capture the fine-grained spatial correlation of the traffic road network and then uses a Bi-directional Gated Recurrent Unit (BiGRU) to model time series with spatial information and obtains the temporal correlation by analysing the change in information transfer between the forward and reverse neurons of the time series data. Our comparative experimental results on two real datasets show that RGCRN improves on average by 20.66% compared to the best baseline model. You can get our source code and data through https://github.com/zhangshqii/RGCRN.
RMFGP: Rotated Multi-fidelity Gaussian process with Dimension Reduction for High-dimensional Uncertainty Quantification
Apr 11, 2022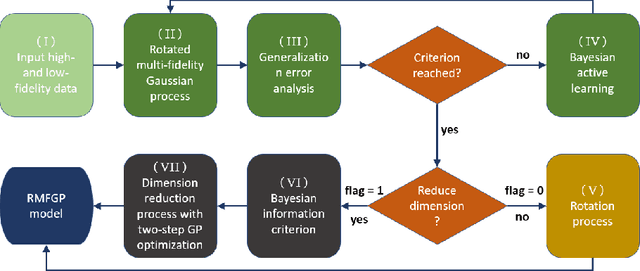

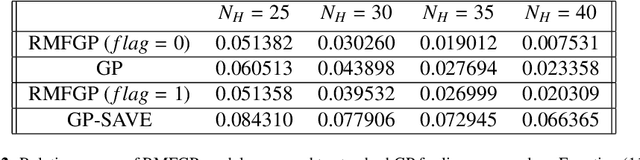
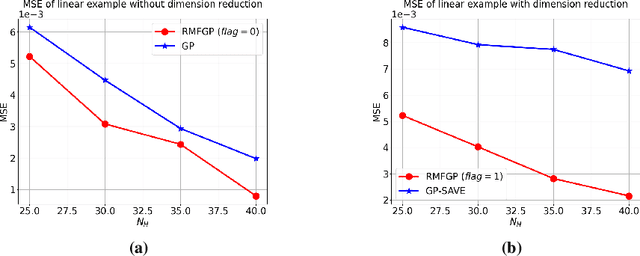
Multi-fidelity modelling arises in many situations in computational science and engineering world. It enables accurate inference even when only a small set of accurate data is available. Those data often come from a high-fidelity model, which is computationally expensive. By combining the realizations of the high-fidelity model with one or more low-fidelity models, the multi-fidelity method can make accurate predictions of quantities of interest. This paper proposes a new dimension reduction framework based on rotated multi-fidelity Gaussian process regression and a Bayesian active learning scheme when the available precise observations are insufficient. By drawing samples from the trained rotated multi-fidelity model, the so-called supervised dimension reduction problems can be solved following the idea of the sliced average variance estimation (SAVE) method combined with a Gaussian process regression dimension reduction technique. This general framework we develop can effectively solve high-dimensional problems while the data are insufficient for applying traditional dimension reduction methods. Moreover, a more accurate surrogate Gaussian process model of the original problem can be obtained based on our trained model. The effectiveness of the proposed rotated multi-fidelity Gaussian process(RMFGP) model is demonstrated in four numerical examples. The results show that our method has better performance in all cases and uncertainty propagation analysis is performed for last two cases involving stochastic partial differential equations.
MultiAuto-DeepONet: A Multi-resolution Autoencoder DeepONet for Nonlinear Dimension Reduction, Uncertainty Quantification and Operator Learning of Forward and Inverse Stochastic Problems
Apr 07, 2022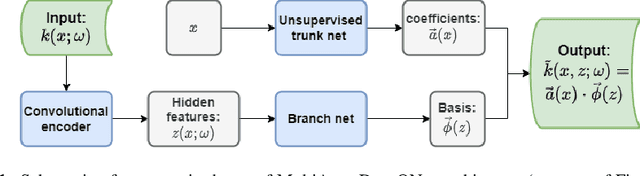
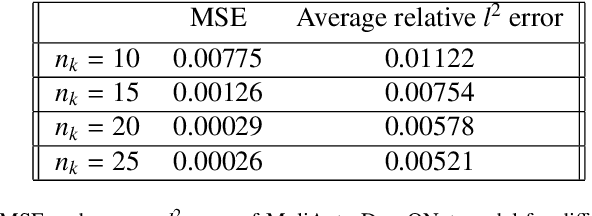
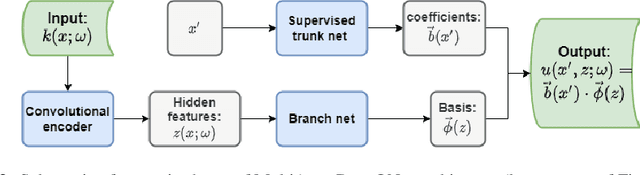

A new data-driven method for operator learning of stochastic differential equations(SDE) is proposed in this paper. The central goal is to solve forward and inverse stochastic problems more effectively using limited data. Deep operator network(DeepONet) has been proposed recently for operator learning. Compared to other neural networks to learn functions, it aims at the problem of learning nonlinear operators. However, it can be challenging by using the original model to learn nonlinear operators for high-dimensional stochastic problems. We propose a new multi-resolution autoencoder DeepONet model referred to as MultiAuto-DeepONet to deal with this difficulty with the aid of convolutional autoencoder. The encoder part of the network is designed to reduce the dimensionality as well as discover the hidden features of high-dimensional stochastic inputs. The decoder is designed to have a special structure, i.e. in the form of DeepONet. The first DeepONet in decoder is designed to reconstruct the input function involving randomness while the second one is used to approximate the solution of desired equations. Those two DeepONets has a common branch net and two independent trunk nets. This architecture enables us to deal with multi-resolution inputs naturally. By adding $L_1$ regularization to our network, we found the outputs from the branch net and two trunk nets all have sparse structures. This reduces the number of trainable parameters in the neural network thus making the model more efficient. Finally, we conduct several numerical experiments to illustrate the effectiveness of our proposed MultiAuto-DeepONet model with uncertainty quantification.
PAGP: A physics-assisted Gaussian process framework with active learning for forward and inverse problems of partial differential equations
Apr 06, 2022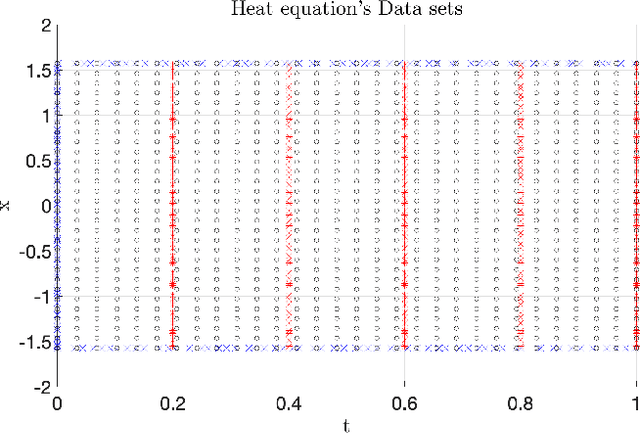
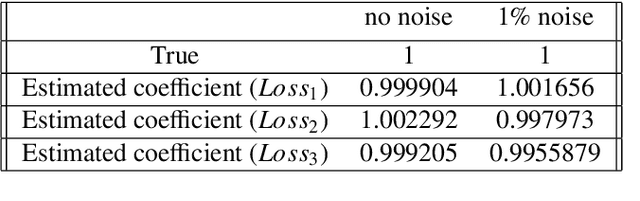
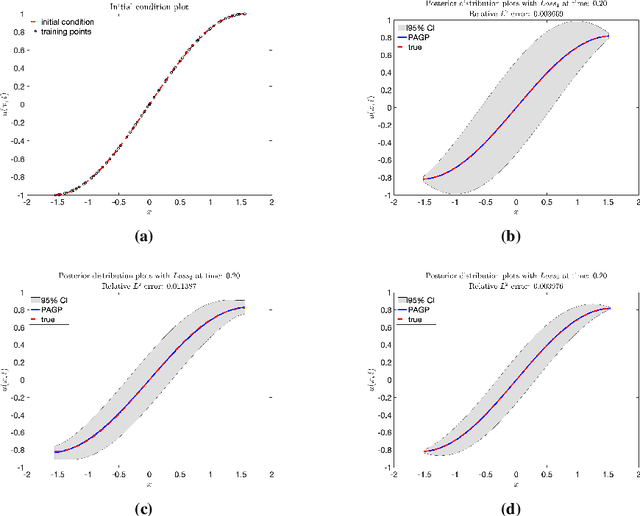
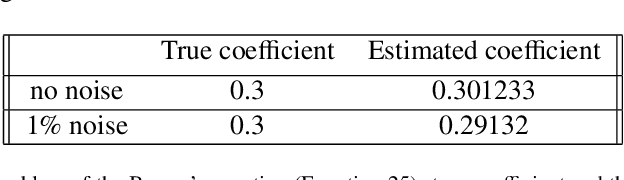
In this work, a Gaussian process regression(GPR) model incorporated with given physical information in partial differential equations(PDEs) is developed: physics-assisted Gaussian processes(PAGP). The targets of this model can be divided into two types of problem: finding solutions or discovering unknown coefficients of given PDEs with initial and boundary conditions. We introduce three different models: continuous time, discrete time and hybrid models. The given physical information is integrated into Gaussian process model through our designed GP loss functions. Three types of loss function are provided in this paper based on two different approaches to train the standard GP model. The first part of the paper introduces the continuous time model which treats temporal domain the same as spatial domain. The unknown coefficients in given PDEs can be jointly learned with GP hyper-parameters by minimizing the designed loss function. In the discrete time models, we first choose a time discretization scheme to discretize the temporal domain. Then the PAGP model is applied at each time step together with the scheme to approximate PDE solutions at given test points of final time. To discover unknown coefficients in this setting, observations at two specific time are needed and a mixed mean square error function is constructed to obtain the optimal coefficients. In the last part, a novel hybrid model combining the continuous and discrete time models is presented. It merges the flexibility of continuous time model and the accuracy of the discrete time model. The performance of choosing different models with different GP loss functions is also discussed. The effectiveness of the proposed PAGP methods is illustrated in our numerical section.
STCGAT: Spatial-temporal causal networks for complex urban road traffic flow prediction
Mar 21, 2022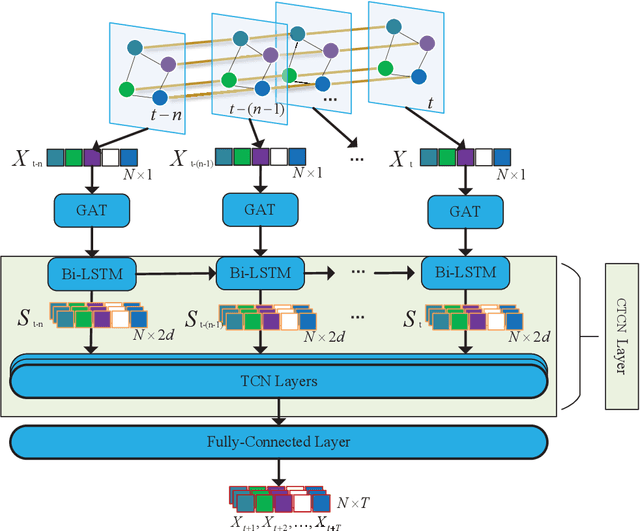
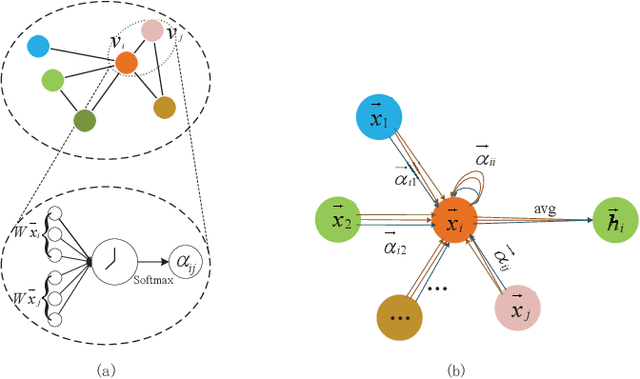
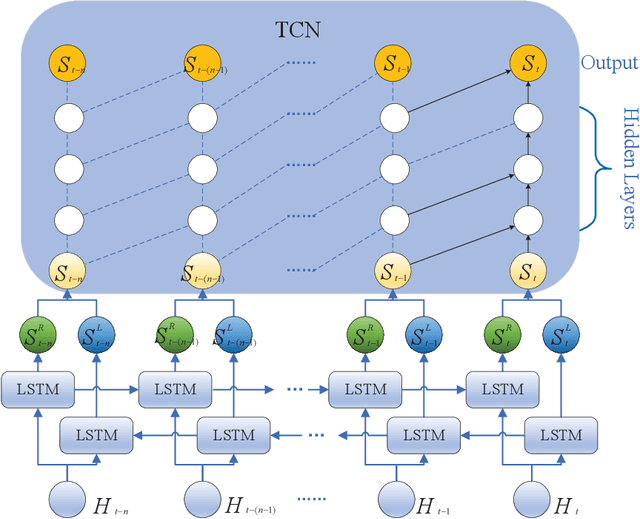
Traffic forecasting is an essential component of intelligent transportation systems. However, traffic data are highly nonlinear and have complex spatial correlations between road nodes. Therefore, it is incredibly challenging to dig deeper into the underlying Spatial-temporal relationships from the complex traffic data. Existing approaches usually use fixed traffic road network topology maps and independent time series modules to capture Spatial-temporal correlations, ignoring the dynamic changes of traffic road networks and the inherent temporal causal relationships between traffic events. Therefore, a new prediction model is proposed in this study. The model dynamically captures the spatial dependence of the traffic network through a Graph Attention Network(GAT) and then analyzes the causal relationship of the traffic data using our proposed Causal Temporal Convolutional Network(CTCN) to obtain the overall temporal dependence. We conducted extensive comparison experiments with other traffic prediction methods on two real traffic datasets to evaluate the model's prediction performance. Compared with the best experimental results of different prediction methods, the prediction performance of our approach is improved by more than 50%. You can get our source code and data through https://github.com/zhangshqii/STCGAT.
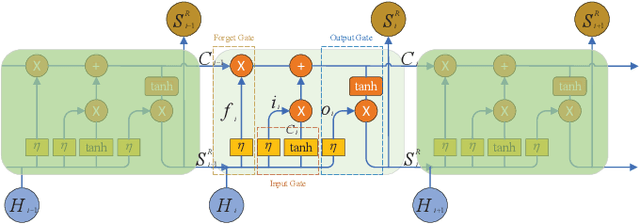
Visually Grounded Task and Motion Planning for Mobile Manipulation
Feb 24, 2022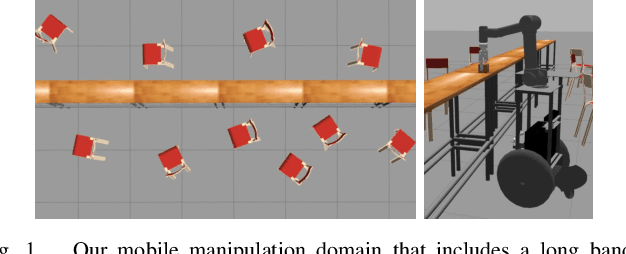
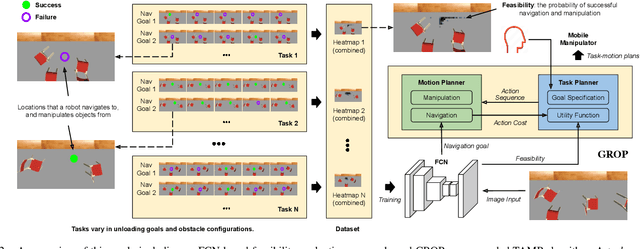
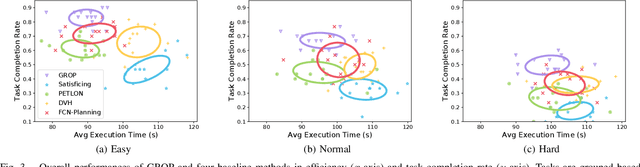
Task and motion planning (TAMP) algorithms aim to help robots achieve task-level goals, while maintaining motion-level feasibility. This paper focuses on TAMP domains that involve robot behaviors that take extended periods of time (e.g., long-distance navigation). In this paper, we develop a visual grounding approach to help robots probabilistically evaluate action feasibility, and introduce a TAMP algorithm, called GROP, that optimizes both feasibility and efficiency. We have collected a dataset that includes 96,000 simulated trials of a robot conducting mobile manipulation tasks, and then used the dataset to learn to ground symbolic spatial relationships for action feasibility evaluation. Compared with competitive TAMP baselines, GROP exhibited a higher task-completion rate while maintaining lower or comparable action costs. In addition to these extensive experiments in simulation, GROP is fully implemented and tested on a real robot system.
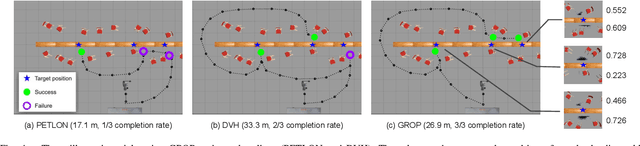
Reasoning with Scene Graphs for Robot Planning under Partial Observability
Feb 21, 2022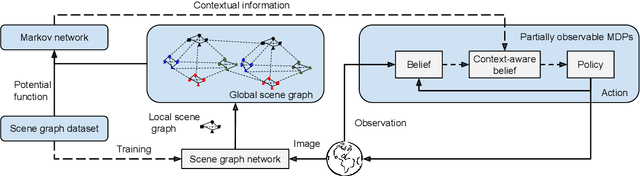
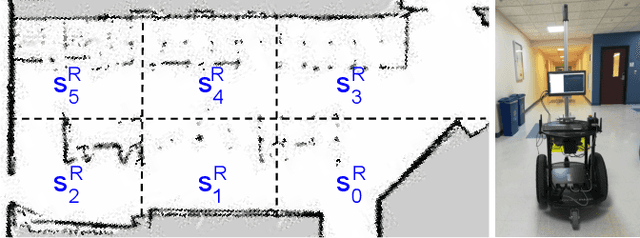
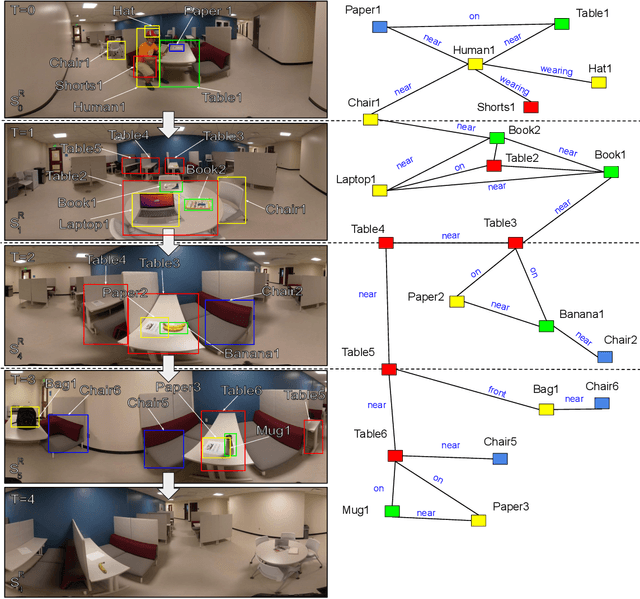
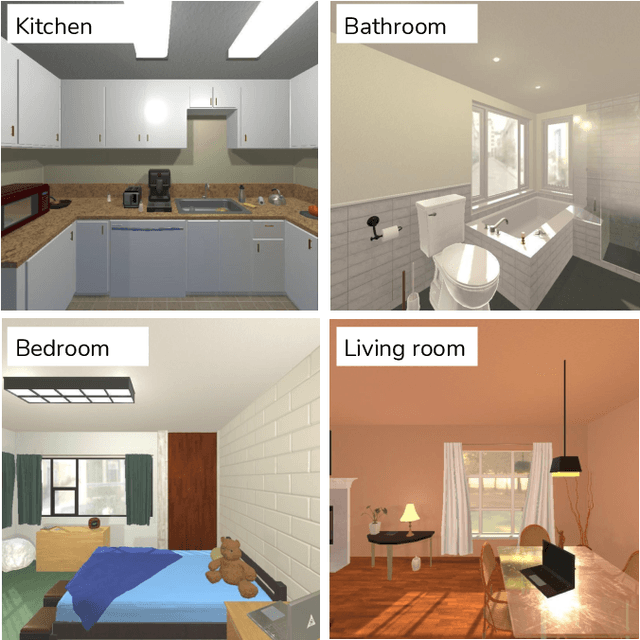
Robot planning in partially observable domains is difficult, because a robot needs to estimate the current state and plan actions at the same time. When the domain includes many objects, reasoning about the objects and their relationships makes robot planning even more difficult. In this paper, we develop an algorithm called scene analysis for robot planning (SARP) that enables robots to reason with visual contextual information toward achieving long-term goals under uncertainty. SARP constructs scene graphs, a factored representation of objects and their relations, using images captured from different positions, and reasons with them to enable context-aware robot planning under partial observability. Experiments have been conducted using multiple 3D environments in simulation, and a dataset collected by a real robot. In comparison to standard robot planning and scene analysis methods, in a target search domain, SARP improves both efficiency and accuracy in task completion. Supplementary material can be found at https://tinyurl.com/sarp22
DeepONet-Grid-UQ: A Trustworthy Deep Operator Framework for Predicting the Power Grid's Post-Fault Trajectories
Feb 15, 2022This paper proposes a new data-driven method for the reliable prediction of power system post-fault trajectories. The proposed method is based on the fundamentally new concept of Deep Operator Networks (DeepONets). Compared to traditional neural networks that learn to approximate functions, DeepONets are designed to approximate nonlinear operators. Under this operator framework, we design a DeepONet to (1) take as inputs the fault-on trajectories collected, for example, via simulation or phasor measurement units, and (2) provide as outputs the predicted post-fault trajectories. In addition, we endow our method with a much-needed ability to balance efficiency with reliable/trustworthy predictions via uncertainty quantification. To this end, we propose and compare two methods that enable quantifying the predictive uncertainty. First, we propose a \textit{Bayesian DeepONet} (B-DeepONet) that uses stochastic gradient Hamiltonian Monte-Carlo to sample from the posterior distribution of the DeepONet parameters. Then, we propose a \textit{Probabilistic DeepONet} (Prob-DeepONet) that uses a probabilistic training strategy to equip DeepONets with a form of automated uncertainty quantification, at virtually no extra computational cost. Finally, we validate the predictive power and uncertainty quantification capability of the proposed B-DeepONet and Prob-DeepONet using the IEEE 16-machine 68-bus system.