 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBackdoor Attacks Against Deep Image Compression via Adaptive Frequency Trigger
Feb 28, 2023Recent deep-learning-based compression methods have achieved superior performance compared with traditional approaches. However, deep learning models have proven to be vulnerable to backdoor attacks, where some specific trigger patterns added to the input can lead to malicious behavior of the models. In this paper, we present a novel backdoor attack with multiple triggers against learned image compression models. Motivated by the widely used discrete cosine transform (DCT) in existing compression systems and standards, we propose a frequency-based trigger injection model that adds triggers in the DCT domain. In particular, we design several attack objectives for various attacking scenarios, including: 1) attacking compression quality in terms of bit-rate and reconstruction quality; 2) attacking task-driven measures, such as down-stream face recognition and semantic segmentation. Moreover, a novel simple dynamic loss is designed to balance the influence of different loss terms adaptively, which helps achieve more efficient training. Extensive experiments show that with our trained trigger injection models and simple modification of encoder parameters (of the compression model), the proposed attack can successfully inject several backdoors with corresponding triggers in a single image compression model.
DETR4D: Direct Multi-View 3D Object Detection with Sparse Attention
Dec 15, 20223D object detection with surround-view images is an essential task for autonomous driving. In this work, we propose DETR4D, a Transformer-based framework that explores sparse attention and direct feature query for 3D object detection in multi-view images. We design a novel projective cross-attention mechanism for query-image interaction to address the limitations of existing methods in terms of geometric cue exploitation and information loss for cross-view objects. In addition, we introduce a heatmap generation technique that bridges 3D and 2D spaces efficiently via query initialization. Furthermore, unlike the common practice of fusing intermediate spatial features for temporal aggregation, we provide a new perspective by introducing a novel hybrid approach that performs cross-frame fusion over past object queries and image features, enabling efficient and robust modeling of temporal information. Extensive experiments on the nuScenes dataset demonstrate the effectiveness and efficiency of the proposed DETR4D.
Domain Adaptive Scene Text Detection via Subcategorization
Dec 01, 2022Most existing scene text detectors require large-scale training data which cannot scale well due to two major factors: 1) scene text images often have domain-specific distributions; 2) collecting large-scale annotated scene text images is laborious. We study domain adaptive scene text detection, a largely neglected yet very meaningful task that aims for optimal transfer of labelled scene text images while handling unlabelled images in various new domains. Specifically, we design SCAST, a subcategory-aware self-training technique that mitigates the network overfitting and noisy pseudo labels in domain adaptive scene text detection effectively. SCAST consists of two novel designs. For labelled source data, it introduces pseudo subcategories for both foreground texts and background stuff which helps train more generalizable source models with multi-class detection objectives. For unlabelled target data, it mitigates the network overfitting by co-regularizing the binary and subcategory classifiers trained in the source domain. Extensive experiments show that SCAST achieves superior detection performance consistently across multiple public benchmarks, and it also generalizes well to other domain adaptive detection tasks such as vehicle detection.
Towards Efficient Use of Multi-Scale Features in Transformer-Based Object Detectors
Aug 24, 2022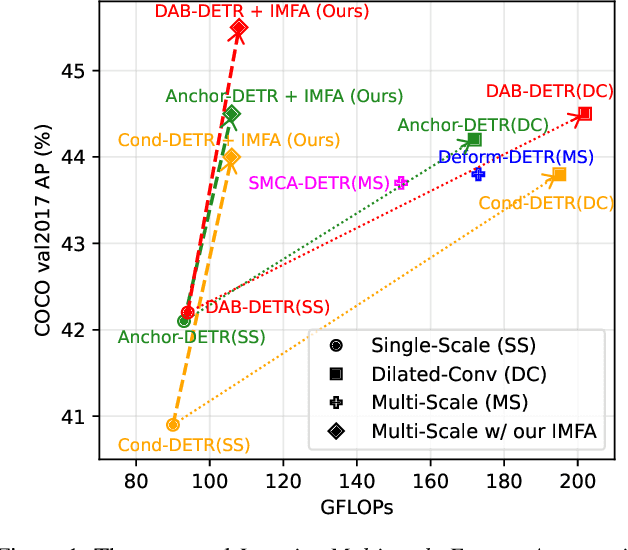
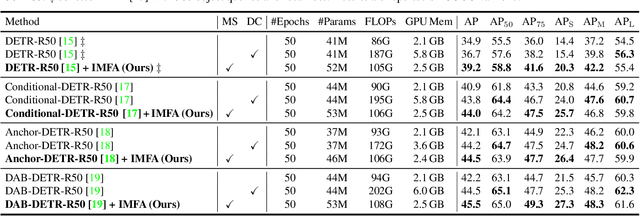
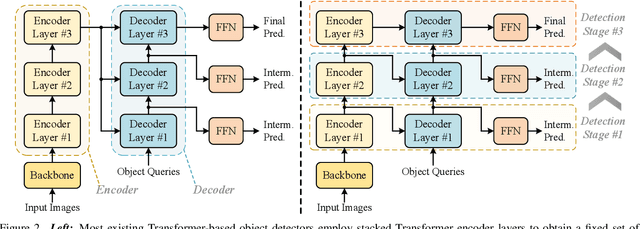
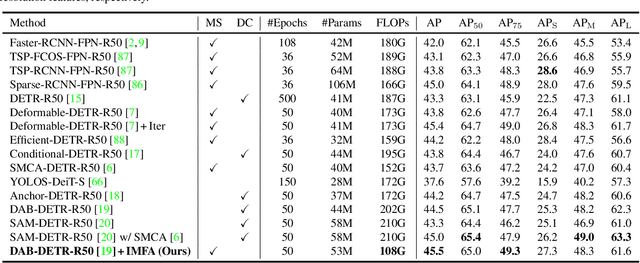
Multi-scale features have been proven highly effective for object detection, and most ConvNet-based object detectors adopt Feature Pyramid Network (FPN) as a basic component for exploiting multi-scale features. However, for the recently proposed Transformer-based object detectors, directly incorporating multi-scale features leads to prohibitive computational overhead due to the high complexity of the attention mechanism for processing high-resolution features. This paper presents Iterative Multi-scale Feature Aggregation (IMFA) -- a generic paradigm that enables the efficient use of multi-scale features in Transformer-based object detectors. The core idea is to exploit sparse multi-scale features from just a few crucial locations, and it is achieved with two novel designs. First, IMFA rearranges the Transformer encoder-decoder pipeline so that the encoded features can be iteratively updated based on the detection predictions. Second, IMFA sparsely samples scale-adaptive features for refined detection from just a few keypoint locations under the guidance of prior detection predictions. As a result, the sampled multi-scale features are sparse yet still highly beneficial for object detection. Extensive experiments show that the proposed IMFA boosts the performance of multiple Transformer-based object detectors significantly yet with slight computational overhead. Project page: https://github.com/ZhangGongjie/IMFA.
Exploring Point-BEV Fusion for 3D Point Cloud Object Tracking with Transformer
Aug 10, 2022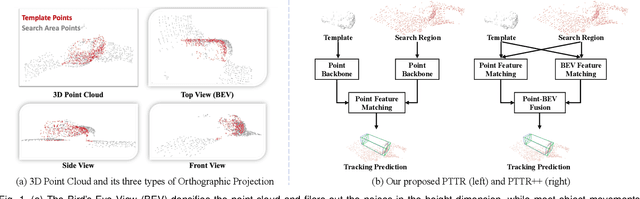
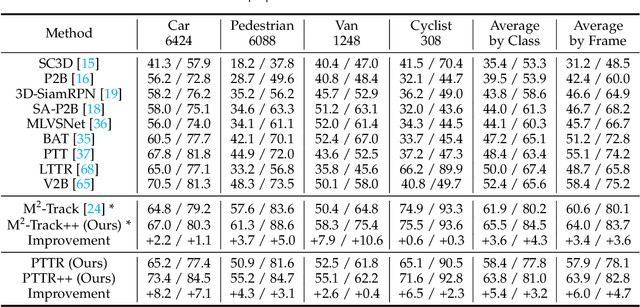
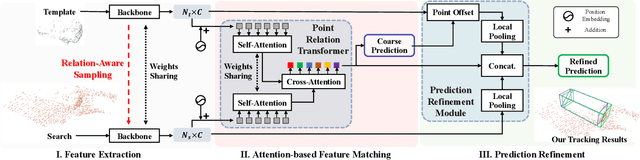
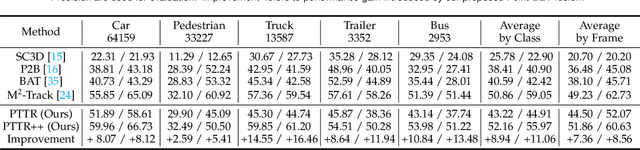
With the prevalence of LiDAR sensors in autonomous driving, 3D object tracking has received increasing attention. In a point cloud sequence, 3D object tracking aims to predict the location and orientation of an object in consecutive frames given an object template. Motivated by the success of transformers, we propose Point Tracking TRansformer (PTTR), which efficiently predicts high-quality 3D tracking results in a coarse-to-fine manner with the help of transformer operations. PTTR consists of three novel designs. 1) Instead of random sampling, we design Relation-Aware Sampling to preserve relevant points to the given template during subsampling. 2) We propose a Point Relation Transformer for effective feature aggregation and feature matching between the template and search region. 3) Based on the coarse tracking results, we employ a novel Prediction Refinement Module to obtain the final refined prediction through local feature pooling. In addition, motivated by the favorable properties of the Bird's-Eye View (BEV) of point clouds in capturing object motion, we further design a more advanced framework named PTTR++, which incorporates both the point-wise view and BEV representation to exploit their complementary effect in generating high-quality tracking results. PTTR++ substantially boosts the tracking performance on top of PTTR with low computational overhead. Extensive experiments over multiple datasets show that our proposed approaches achieve superior 3D tracking accuracy and efficiency.
Latent Multi-Relation Reasoning for GAN-Prior based Image Super-Resolution
Aug 04, 2022Recently, single image super-resolution (SR) under large scaling factors has witnessed impressive progress by introducing pre-trained generative adversarial networks (GANs) as priors. However, most GAN-Priors based SR methods are constrained by an attribute disentanglement problem in inverted latent codes which directly leads to mismatches of visual attributes in the generator layers and further degraded reconstruction. In addition, stochastic noises fed to the generator are employed for unconditional detail generation, which tends to produce unfaithful details that compromise the fidelity of the generated SR image. We design LAREN, a LAtent multi-Relation rEasoNing technique that achieves superb large-factor SR through graph-based multi-relation reasoning in latent space. LAREN consists of two innovative designs. The first is graph-based disentanglement that constructs a superior disentangled latent space via hierarchical multi-relation reasoning. The second is graph-based code generation that produces image-specific codes progressively via recursive relation reasoning which enables prior GANs to generate desirable image details. Extensive experiments show that LAREN achieves superior large-factor image SR and outperforms the state-of-the-art consistently across multiple benchmarks.
TransPillars: Coarse-to-Fine Aggregation for Multi-Frame 3D Object Detection
Aug 04, 2022



3D object detection using point clouds has attracted increasing attention due to its wide applications in autonomous driving and robotics. However, most existing studies focus on single point cloud frames without harnessing the temporal information in point cloud sequences. In this paper, we design TransPillars, a novel transformer-based feature aggregation technique that exploits temporal features of consecutive point cloud frames for multi-frame 3D object detection. TransPillars aggregates spatial-temporal point cloud features from two perspectives. First, it fuses voxel-level features directly from multi-frame feature maps instead of pooled instance features to preserve instance details with contextual information that are essential to accurate object localization. Second, it introduces a hierarchical coarse-to-fine strategy to fuse multi-scale features progressively to effectively capture the motion of moving objects and guide the aggregation of fine features. Besides, a variant of deformable transformer is introduced to improve the effectiveness of cross-frame feature matching. Extensive experiments show that our proposed TransPillars achieves state-of-art performance as compared to existing multi-frame detection approaches. Code will be released.
PolarMix: A General Data Augmentation Technique for LiDAR Point Clouds
Jul 30, 2022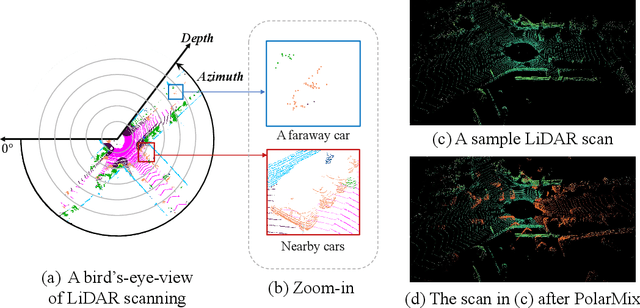
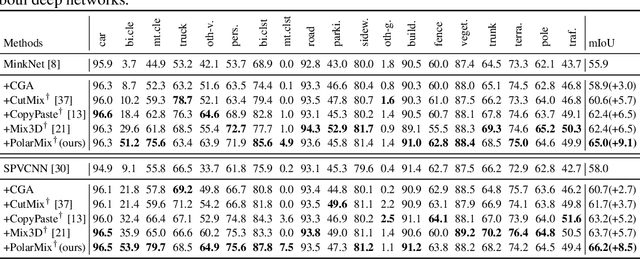
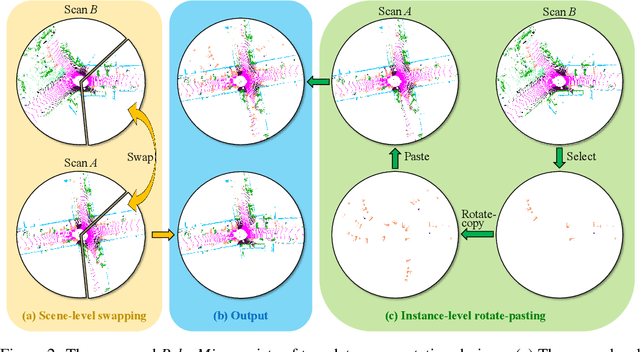
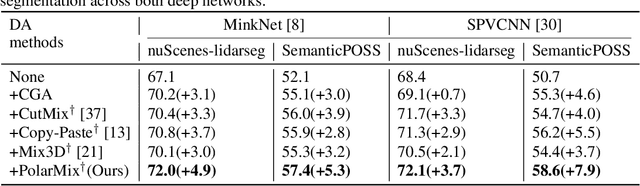
LiDAR point clouds, which are usually scanned by rotating LiDAR sensors continuously, capture precise geometry of the surrounding environment and are crucial to many autonomous detection and navigation tasks. Though many 3D deep architectures have been developed, efficient collection and annotation of large amounts of point clouds remain one major challenge in the analytic and understanding of point cloud data. This paper presents PolarMix, a point cloud augmentation technique that is simple and generic but can mitigate the data constraint effectively across different perception tasks and scenarios. PolarMix enriches point cloud distributions and preserves point cloud fidelity via two cross-scan augmentation strategies that cut, edit, and mix point clouds along the scanning direction. The first is scene-level swapping which exchanges point cloud sectors of two LiDAR scans that are cut along the azimuth axis. The second is instance-level rotation and paste which crops point instances from one LiDAR scan, rotates them by multiple angles (to create multiple copies), and paste the rotated point instances into other scans. Extensive experiments show that PolarMix achieves superior performance consistently across different perception tasks and scenarios. In addition, it can work as plug-and-play for various 3D deep architectures and also performs well for unsupervised domain adaptation.
Meta-DETR: Image-Level Few-Shot Detection with Inter-Class Correlation Exploitation
Jul 30, 2022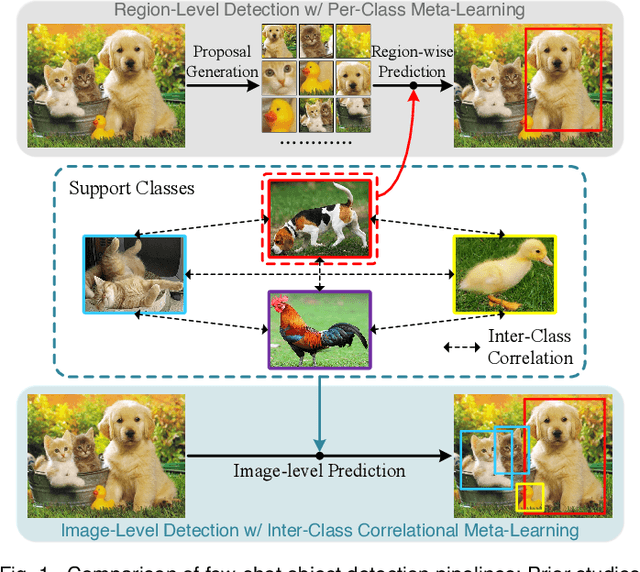
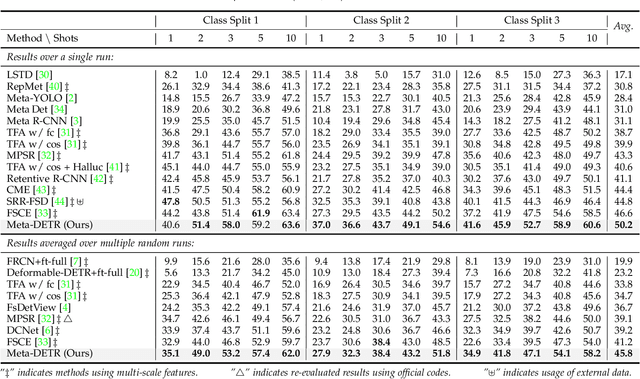
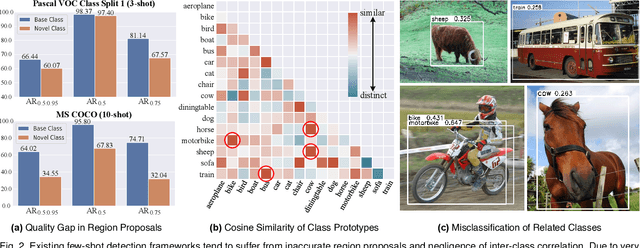
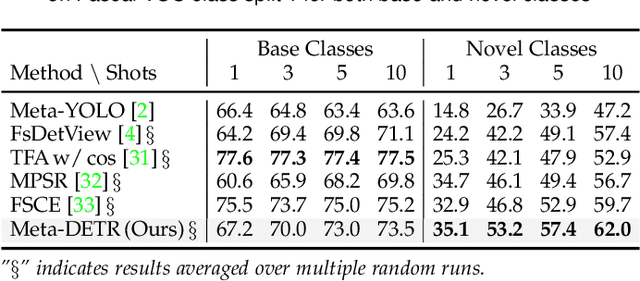
Few-shot object detection has been extensively investigated by incorporating meta-learning into region-based detection frameworks. Despite its success, the said paradigm is still constrained by several factors, such as (i) low-quality region proposals for novel classes and (ii) negligence of the inter-class correlation among different classes. Such limitations hinder the generalization of base-class knowledge for the detection of novel-class objects. In this work, we design Meta-DETR, which (i) is the first image-level few-shot detector, and (ii) introduces a novel inter-class correlational meta-learning strategy to capture and leverage the correlation among different classes for robust and accurate few-shot object detection. Meta-DETR works entirely at image level without any region proposals, which circumvents the constraint of inaccurate proposals in prevalent few-shot detection frameworks. In addition, the introduced correlational meta-learning enables Meta-DETR to simultaneously attend to multiple support classes within a single feedforward, which allows to capture the inter-class correlation among different classes, thus significantly reducing the misclassification over similar classes and enhancing knowledge generalization to novel classes. Experiments over multiple few-shot object detection benchmarks show that the proposed Meta-DETR outperforms state-of-the-art methods by large margins. The implementation codes are available at https://github.com/ZhangGongjie/Meta-DETR.
Semantic-Aligned Matching for Enhanced DETR Convergence and Multi-Scale Feature Fusion
Jul 28, 2022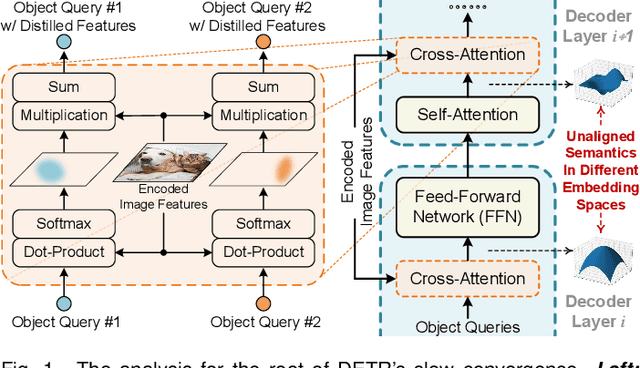
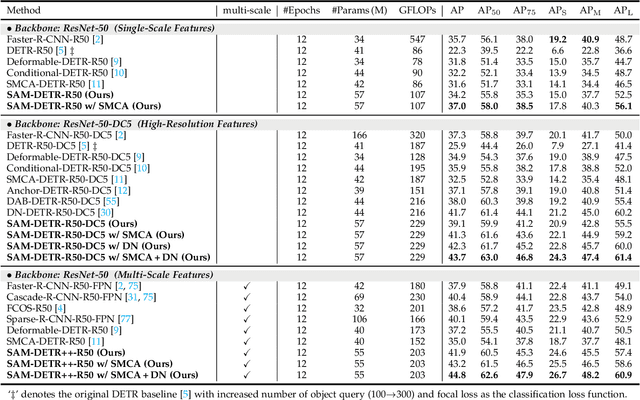
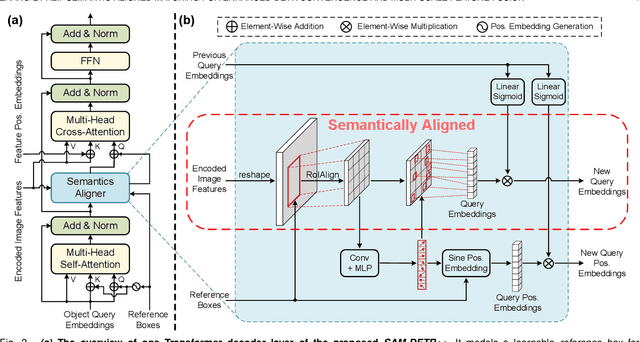
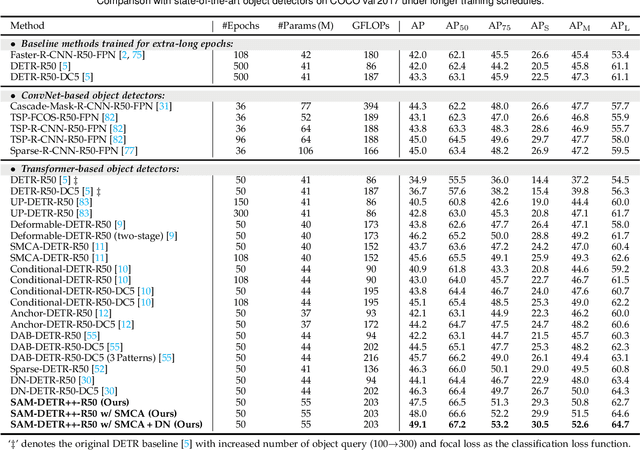
The recently proposed DEtection TRansformer (DETR) has established a fully end-to-end paradigm for object detection. However, DETR suffers from slow training convergence, which hinders its applicability to various detection tasks. We observe that DETR's slow convergence is largely attributed to the difficulty in matching object queries to relevant regions due to the unaligned semantics between object queries and encoded image features. With this observation, we design Semantic-Aligned-Matching DETR++ (SAM-DETR++) to accelerate DETR's convergence and improve detection performance. The core of SAM-DETR++ is a plug-and-play module that projects object queries and encoded image features into the same feature embedding space, where each object query can be easily matched to relevant regions with similar semantics. Besides, SAM-DETR++ searches for multiple representative keypoints and exploits their features for semantic-aligned matching with enhanced representation capacity. Furthermore, SAM-DETR++ can effectively fuse multi-scale features in a coarse-to-fine manner on the basis of the designed semantic-aligned matching. Extensive experiments show that the proposed SAM-DETR++ achieves superior convergence speed and competitive detection accuracy. Additionally, as a plug-and-play method, SAM-DETR++ can complement existing DETR convergence solutions with even better performance, achieving 44.8% AP with merely 12 training epochs and 49.1% AP with 50 training epochs on COCO val2017 with ResNet-50. Codes are available at https://github.com/ZhangGongjie/SAM-DETR .