 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReferring Industrial Anomaly Segmentation
Feb 03, 2026Industrial Anomaly Detection (IAD) is vital for manufacturing, yet traditional methods face significant challenges: unsupervised approaches yield rough localizations requiring manual thresholds, while supervised methods overfit due to scarce, imbalanced data. Both suffer from the "One Anomaly Class, One Model" limitation. To address this, we propose Referring Industrial Anomaly Segmentation (RIAS), a paradigm leveraging language to guide detection. RIAS generates precise masks from text descriptions without manual thresholds and uses universal prompts to detect diverse anomalies with a single model. We introduce the MVTec-Ref dataset to support this, designed with diverse referring expressions and focusing on anomaly patterns, notably with 95% small anomalies. We also propose the Dual Query Token with Mask Group Transformer (DQFormer) benchmark, enhanced by Language-Gated Multi-Level Aggregation (LMA) to improve multi-scale segmentation. Unlike traditional methods using redundant queries, DQFormer employs only "Anomaly" and "Background" tokens for efficient visual-textual integration. Experiments demonstrate RIAS's effectiveness in advancing IAD toward open-set capabilities. Code: https://github.com/swagger-coder/RIAS-MVTec-Ref.
SCOUT: Semi-supervised Camouflaged Object Detection by Utilizing Text and Adaptive Data Selection
Aug 25, 2025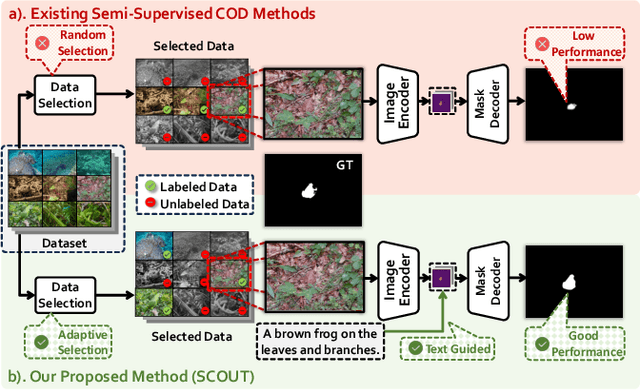

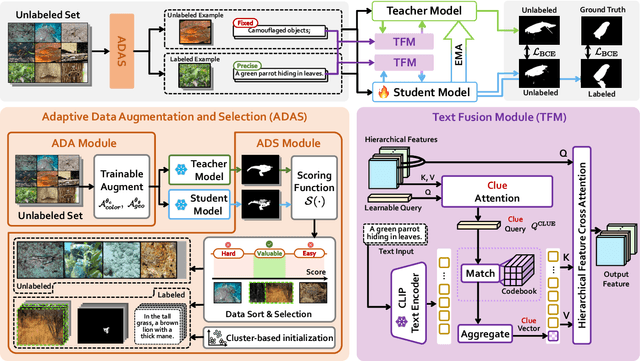

The difficulty of pixel-level annotation has significantly hindered the development of the Camouflaged Object Detection (COD) field. To save on annotation costs, previous works leverage the semi-supervised COD framework that relies on a small number of labeled data and a large volume of unlabeled data. We argue that there is still significant room for improvement in the effective utilization of unlabeled data. To this end, we introduce a Semi-supervised Camouflaged Object Detection by Utilizing Text and Adaptive Data Selection (SCOUT). It includes an Adaptive Data Augment and Selection (ADAS) module and a Text Fusion Module (TFM). The ADSA module selects valuable data for annotation through an adversarial augment and sampling strategy. The TFM module further leverages the selected valuable data by combining camouflage-related knowledge and text-visual interaction. To adapt to this work, we build a new dataset, namely RefTextCOD. Extensive experiments show that the proposed method surpasses previous semi-supervised methods in the COD field and achieves state-of-the-art performance. Our code will be released at https://github.com/Heartfirey/SCOUT.
XSpecMesh: Quality-Preserving Auto-Regressive Mesh Generation Acceleration via Multi-Head Speculative Decoding
Jul 31, 2025Current auto-regressive models can generate high-quality, topologically precise meshes; however, they necessitate thousands-or even tens of thousands-of next-token predictions during inference, resulting in substantial latency. We introduce XSpecMesh, a quality-preserving acceleration method for auto-regressive mesh generation models. XSpecMesh employs a lightweight, multi-head speculative decoding scheme to predict multiple tokens in parallel within a single forward pass, thereby accelerating inference. We further propose a verification and resampling strategy: the backbone model verifies each predicted token and resamples any tokens that do not meet the quality criteria. In addition, we propose a distillation strategy that trains the lightweight decoding heads by distilling from the backbone model, encouraging their prediction distributions to align and improving the success rate of speculative predictions. Extensive experiments demonstrate that our method achieves a 1.7x speedup without sacrificing generation quality. Our code will be released.
UCOD-DPL: Unsupervised Camouflaged Object Detection via Dynamic Pseudo-label Learning
Jun 08, 2025Unsupervised Camoflaged Object Detection (UCOD) has gained attention since it doesn't need to rely on extensive pixel-level labels. Existing UCOD methods typically generate pseudo-labels using fixed strategies and train 1 x1 convolutional layers as a simple decoder, leading to low performance compared to fully-supervised methods. We emphasize two drawbacks in these approaches: 1). The model is prone to fitting incorrect knowledge due to the pseudo-label containing substantial noise. 2). The simple decoder fails to capture and learn the semantic features of camouflaged objects, especially for small-sized objects, due to the low-resolution pseudo-labels and severe confusion between foreground and background pixels. To this end, we propose a UCOD method with a teacher-student framework via Dynamic Pseudo-label Learning called UCOD-DPL, which contains an Adaptive Pseudo-label Module (APM), a Dual-Branch Adversarial (DBA) decoder, and a Look-Twice mechanism. The APM module adaptively combines pseudo-labels generated by fixed strategies and the teacher model to prevent the model from overfitting incorrect knowledge while preserving the ability for self-correction; the DBA decoder takes adversarial learning of different segmentation objectives, guides the model to overcome the foreground-background confusion of camouflaged objects, and the Look-Twice mechanism mimics the human tendency to zoom in on camouflaged objects and performs secondary refinement on small-sized objects. Extensive experiments show that our method demonstrates outstanding performance, even surpassing some existing fully supervised methods. The code is available now.
What You Perceive Is What You Conceive: A Cognition-Inspired Framework for Open Vocabulary Image Segmentation
May 26, 2025



Open vocabulary image segmentation tackles the challenge of recognizing dynamically adjustable, predefined novel categories at inference time by leveraging vision-language alignment. However, existing paradigms typically perform class-agnostic region segmentation followed by category matching, which deviates from the human visual system's process of recognizing objects based on semantic concepts, leading to poor alignment between region segmentation and target concepts. To bridge this gap, we propose a novel Cognition-Inspired Framework for open vocabulary image segmentation that emulates the human visual recognition process: first forming a conceptual understanding of an object, then perceiving its spatial extent. The framework consists of three core components: (1) A Generative Vision-Language Model (G-VLM) that mimics human cognition by generating object concepts to provide semantic guidance for region segmentation. (2) A Concept-Aware Visual Enhancer Module that fuses textual concept features with global visual representations, enabling adaptive visual perception based on target concepts. (3) A Cognition-Inspired Decoder that integrates local instance features with G-VLM-provided semantic cues, allowing selective classification over a subset of relevant categories. Extensive experiments demonstrate that our framework achieves significant improvements, reaching $27.2$ PQ, $17.0$ mAP, and $35.3$ mIoU on A-150. It further attains $56.2$, $28.2$, $15.4$, $59.2$, $18.7$, and $95.8$ mIoU on Cityscapes, Mapillary Vistas, A-847, PC-59, PC-459, and PAS-20, respectively. In addition, our framework supports vocabulary-free segmentation, offering enhanced flexibility in recognizing unseen categories. Code will be public.
Pseudo-Label Quality Decoupling and Correction for Semi-Supervised Instance Segmentation
May 16, 2025Semi-Supervised Instance Segmentation (SSIS) involves classifying and grouping image pixels into distinct object instances using limited labeled data. This learning paradigm usually faces a significant challenge of unstable performance caused by noisy pseudo-labels of instance categories and pixel masks. We find that the prevalent practice of filtering instance pseudo-labels assessing both class and mask quality with a single score threshold, frequently leads to compromises in the trade-off between the qualities of class and mask labels. In this paper, we introduce a novel Pseudo-Label Quality Decoupling and Correction (PL-DC) framework for SSIS to tackle the above challenges. Firstly, at the instance level, a decoupled dual-threshold filtering mechanism is designed to decouple class and mask quality estimations for instance-level pseudo-labels, thereby independently controlling pixel classifying and grouping qualities. Secondly, at the category level, we introduce a dynamic instance category correction module to dynamically correct the pseudo-labels of instance categories, effectively alleviating category confusion. Lastly, we introduce a pixel-level mask uncertainty-aware mechanism at the pixel level to re-weight the mask loss for different pixels, thereby reducing the impact of noise introduced by pixel-level mask pseudo-labels. Extensive experiments on the COCO and Cityscapes datasets demonstrate that the proposed PL-DC achieves significant performance improvements, setting new state-of-the-art results for SSIS. Notably, our PL-DC shows substantial gains even with minimal labeled data, achieving an improvement of +11.6 mAP with just 1% COCO labeled data and +15.5 mAP with 5% Cityscapes labeled data. The code will be public.
SynergyAmodal: Deocclude Anything with Text Control
Apr 28, 2025

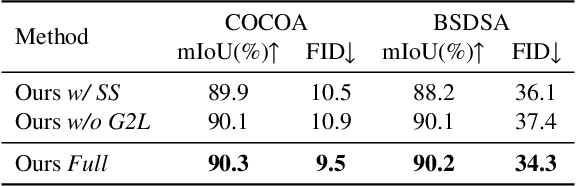
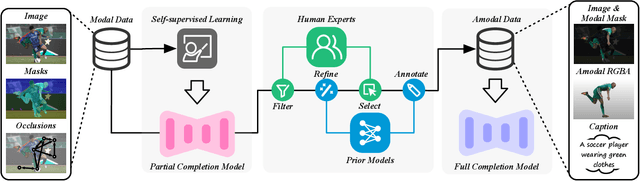
Image deocclusion (or amodal completion) aims to recover the invisible regions (\ie, shape and appearance) of occluded instances in images. Despite recent advances, the scarcity of high-quality data that balances diversity, plausibility, and fidelity remains a major obstacle. To address this challenge, we identify three critical elements: leveraging in-the-wild image data for diversity, incorporating human expertise for plausibility, and utilizing generative priors for fidelity. We propose SynergyAmodal, a novel framework for co-synthesizing in-the-wild amodal datasets with comprehensive shape and appearance annotations, which integrates these elements through a tripartite data-human-model collaboration. First, we design an occlusion-grounded self-supervised learning algorithm to harness the diversity of in-the-wild image data, fine-tuning an inpainting diffusion model into a partial completion diffusion model. Second, we establish a co-synthesis pipeline to iteratively filter, refine, select, and annotate the initial deocclusion results of the partial completion diffusion model, ensuring plausibility and fidelity through human expert guidance and prior model constraints. This pipeline generates a high-quality paired amodal dataset with extensive category and scale diversity, comprising approximately 16K pairs. Finally, we train a full completion diffusion model on the synthesized dataset, incorporating text prompts as conditioning signals. Extensive experiments demonstrate the effectiveness of our framework in achieving zero-shot generalization and textual controllability. Our code, dataset, and models will be made publicly available at https://github.com/imlixinyang/SynergyAmodal.
Training-Free Hierarchical Scene Understanding for Gaussian Splatting with Superpoint Graphs
Apr 17, 2025



Bridging natural language and 3D geometry is a crucial step toward flexible, language-driven scene understanding. While recent advances in 3D Gaussian Splatting (3DGS) have enabled fast and high-quality scene reconstruction, research has also explored incorporating open-vocabulary understanding into 3DGS. However, most existing methods require iterative optimization over per-view 2D semantic feature maps, which not only results in inefficiencies but also leads to inconsistent 3D semantics across views. To address these limitations, we introduce a training-free framework that constructs a superpoint graph directly from Gaussian primitives. The superpoint graph partitions the scene into spatially compact and semantically coherent regions, forming view-consistent 3D entities and providing a structured foundation for open-vocabulary understanding. Based on the graph structure, we design an efficient reprojection strategy that lifts 2D semantic features onto the superpoints, avoiding costly multi-view iterative training. The resulting representation ensures strong 3D semantic coherence and naturally supports hierarchical understanding, enabling both coarse- and fine-grained open-vocabulary perception within a unified semantic field. Extensive experiments demonstrate that our method achieves state-of-the-art open-vocabulary segmentation performance, with semantic field reconstruction completed over $30\times$ faster. Our code will be available at https://github.com/Atrovast/THGS.
S$^2$Teacher: Step-by-step Teacher for Sparsely Annotated Oriented Object Detection
Apr 15, 2025



Although fully-supervised oriented object detection has made significant progress in multimodal remote sensing image understanding, it comes at the cost of labor-intensive annotation. Recent studies have explored weakly and semi-supervised learning to alleviate this burden. However, these methods overlook the difficulties posed by dense annotations in complex remote sensing scenes. In this paper, we introduce a novel setting called sparsely annotated oriented object detection (SAOOD), which only labels partial instances, and propose a solution to address its challenges. Specifically, we focus on two key issues in the setting: (1) sparse labeling leading to overfitting on limited foreground representations, and (2) unlabeled objects (false negatives) confusing feature learning. To this end, we propose the S$^2$Teacher, a novel method that progressively mines pseudo-labels for unlabeled objects, from easy to hard, to enhance foreground representations. Additionally, it reweights the loss of unlabeled objects to mitigate their impact during training. Extensive experiments demonstrate that S$^2$Teacher not only significantly improves detector performance across different sparse annotation levels but also achieves near-fully-supervised performance on the DOTA dataset with only 10% annotation instances, effectively balancing detection accuracy with annotation efficiency. The code will be public.
BUFF: Bayesian Uncertainty Guided Diffusion Probabilistic Model for Single Image Super-Resolution
Apr 04, 2025Super-resolution (SR) techniques are critical for enhancing image quality, particularly in scenarios where high-resolution imagery is essential yet limited by hardware constraints. Existing diffusion models for SR have relied predominantly on Gaussian models for noise generation, which often fall short when dealing with the complex and variable texture inherent in natural scenes. To address these deficiencies, we introduce the Bayesian Uncertainty Guided Diffusion Probabilistic Model (BUFF). BUFF distinguishes itself by incorporating a Bayesian network to generate high-resolution uncertainty masks. These masks guide the diffusion process, allowing for the adjustment of noise intensity in a manner that is both context-aware and adaptive. This novel approach not only enhances the fidelity of super-resolved images to their original high-resolution counterparts but also significantly mitigates artifacts and blurring in areas characterized by complex textures and fine details. The model demonstrates exceptional robustness against complex noise patterns and showcases superior adaptability in handling textures and edges within images. Empirical evidence, supported by visual results, illustrates the model's robustness, especially in challenging scenarios, and its effectiveness in addressing common SR issues such as blurring. Experimental evaluations conducted on the DIV2K dataset reveal that BUFF achieves a notable improvement, with a +0.61 increase compared to baseline in SSIM on BSD100, surpassing traditional diffusion approaches by an average additional +0.20dB PSNR gain. These findings underscore the potential of Bayesian methods in enhancing diffusion processes for SR, paving the way for future advancements in the field.