 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgile Maneuvers in Legged Robots: a Predictive Control Approach
Mar 14, 2022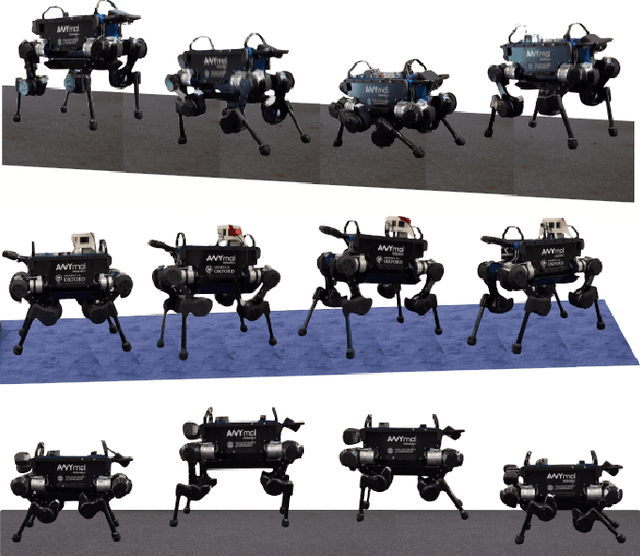
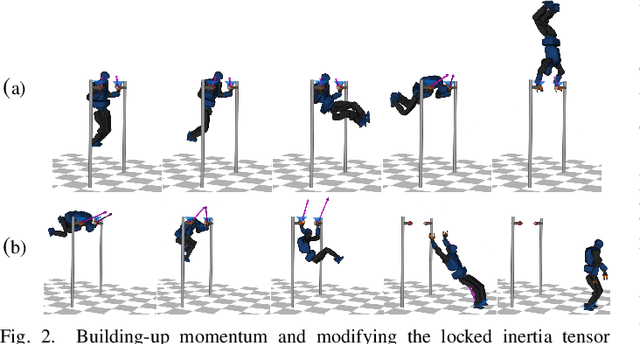
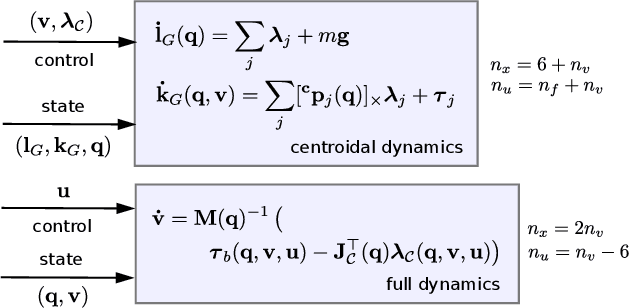
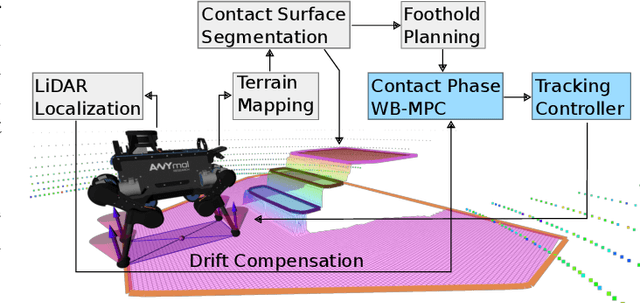
Achieving agile maneuvers through multiple contact phases has been a longstanding challenge in legged robotics. It requires to derive motion plans and local control feedback policies in real-time to handle the nonholonomy of the kinetic momenta. While a few recent predictive control approaches based on centroidal momentum have been able to generate dynamic motions, they assume unlimited actuation capabilities. This assumption is quite restrictive and does not hold for agile maneuvers on most robots. In this work, we present a contact-phase predictive and state-feedback controllers that enables legged robots to plan and perform agile locomotion skills. Our predictive controller models the contact phases using a hybrid paradigm that considers the robot's actuation limits and full dynamics. We demonstrate the benefits of our approach on agile maneuvers on ANYmal robots in realistic scenarios. To the best of our knowledge, our work is the first to show that predictive control can handle actuation limits, generate agile locomotion maneuvers and execute locally optimal feedback policies on hardware without the use of a separate whole-body controller.
RGB-D SLAM in Indoor Planar Environments with Multiple Large Dynamic Objects
Mar 06, 2022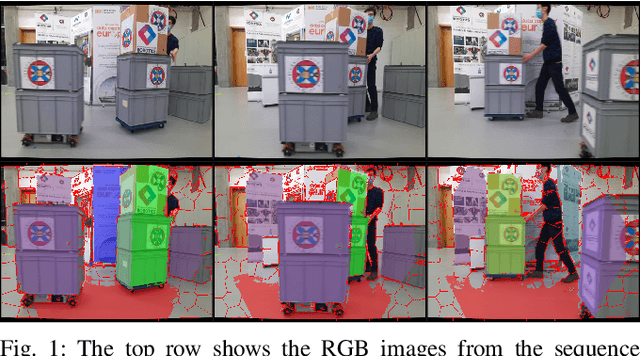
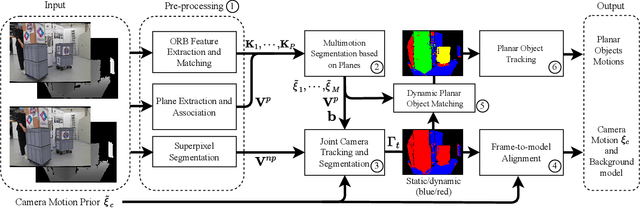
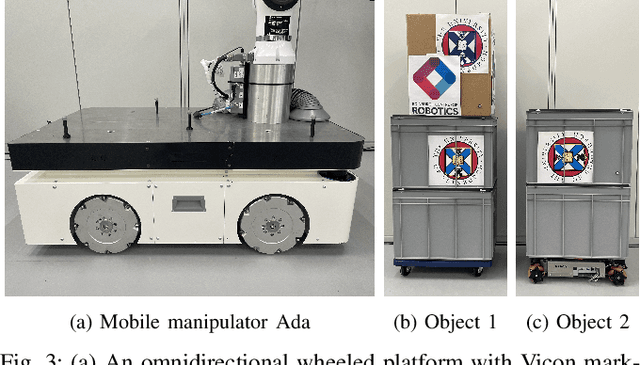
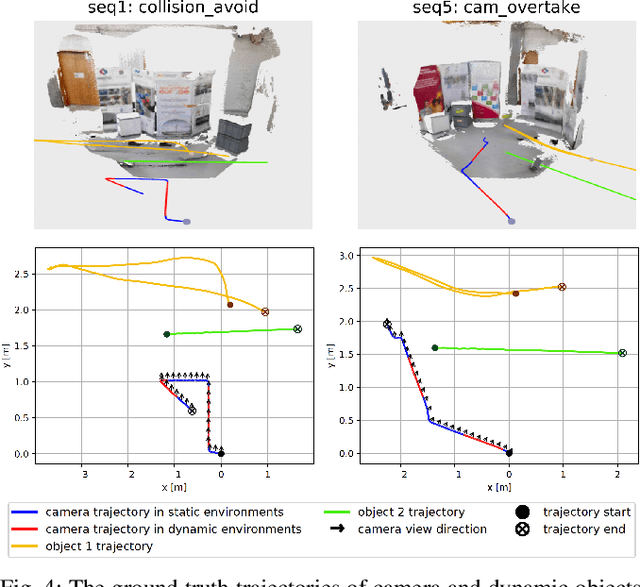
This work presents a novel dense RGB-D SLAM approach for dynamic planar environments that enables simultaneous multi-object tracking, camera localisation and background reconstruction. Previous dynamic SLAM methods either rely on semantic segmentation to directly detect dynamic objects; or assume that dynamic objects occupy a smaller proportion of the camera view than the static background and can, therefore, be removed as outliers. Our approach, however, enables dense SLAM when the camera view is largely occluded by multiple dynamic objects with the aid of camera motion prior. The dynamic planar objects are separated by their different rigid motions and tracked independently. The remaining dynamic non-planar areas are removed as outliers and not mapped into the background. The evaluation demonstrates that our approach outperforms the state-of-the-art methods in terms of localisation, mapping, dynamic segmentation and object tracking. We also demonstrate its robustness to large drift in the camera motion prior.
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
Mar 02, 2022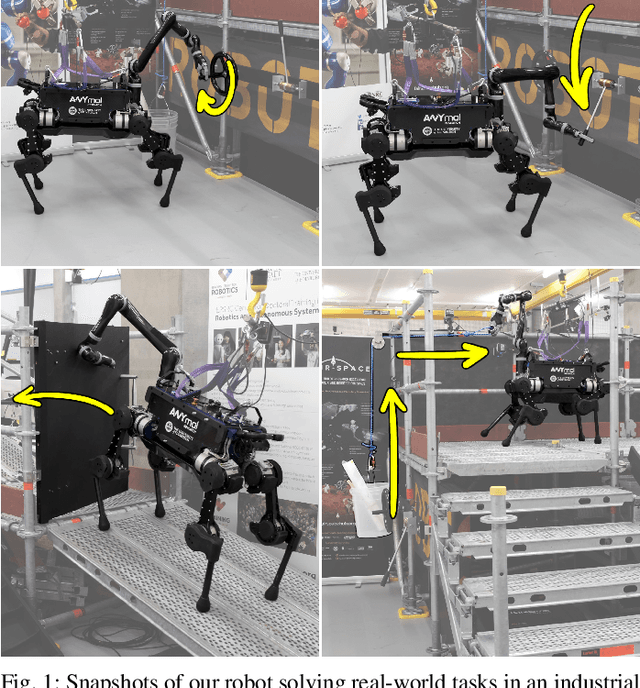
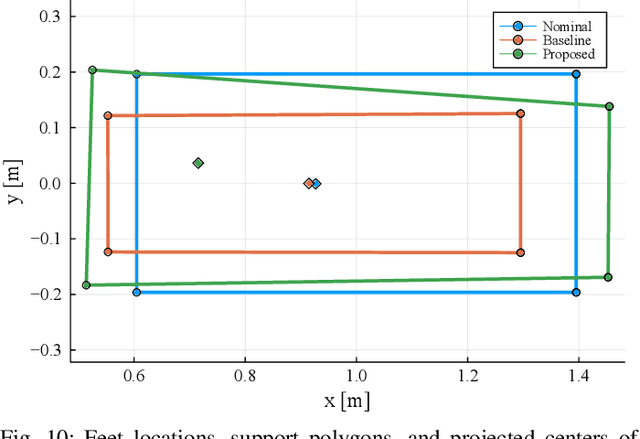
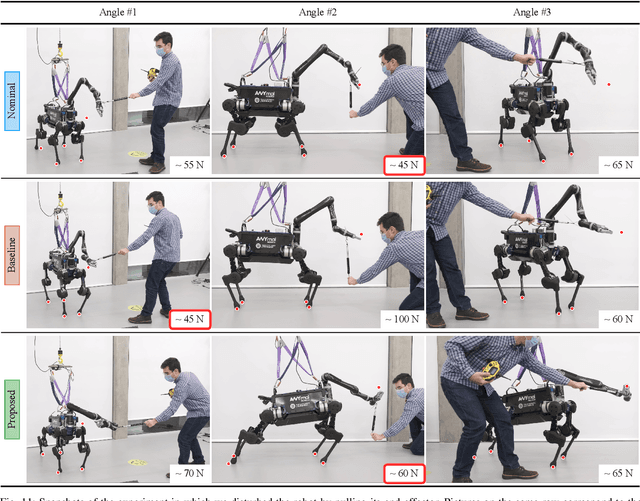
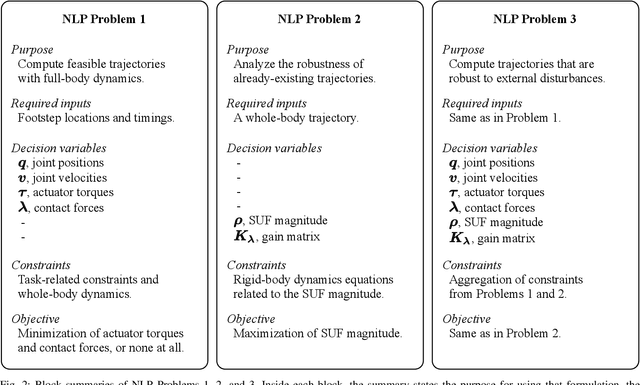
Deployment of robotic systems in the real world requires a certain level of robustness in order to deal with uncertainty factors, such as mismatches in the dynamics model, noise in sensor readings, and communication delays. Some approaches tackle these issues reactively at the control stage. However, regardless of the controller, online motion execution can only be as robust as the system capabilities allow at any given state. This is why it is important to have good motion plans to begin with, where robustness is considered proactively. To this end, we propose a metric (derived from first principles) for representing robustness against external disturbances. We then use this metric within our trajectory optimization framework for solving complex loco-manipulation tasks. Through our experiments, we show that trajectories generated using our approach can resist a greater range of forces originating from any possible direction. By using our method, we can compute trajectories that solve tasks as effectively as before, with the added benefit of being able to counteract stronger disturbances in worst-case scenarios.
Set-based State Estimation with Probabilistic Consistency Guarantee under Epistemic Uncertainty
Oct 18, 2021
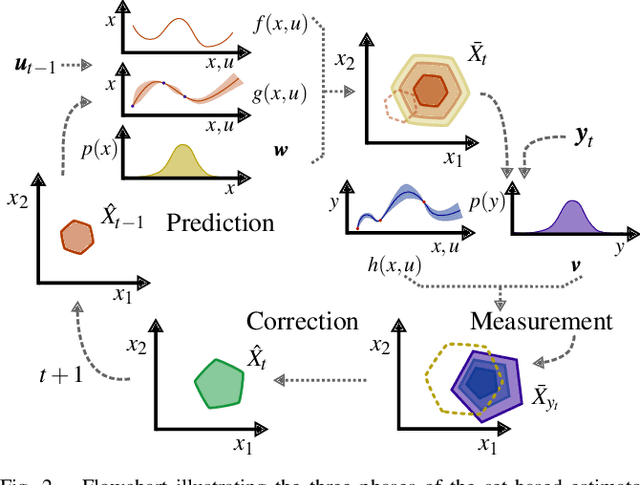
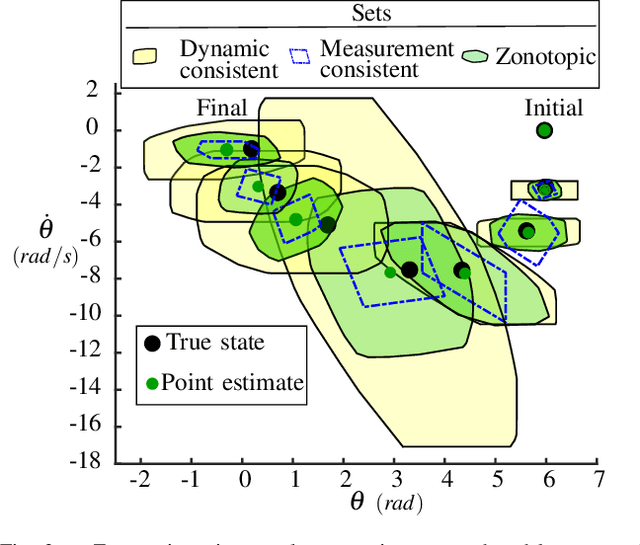
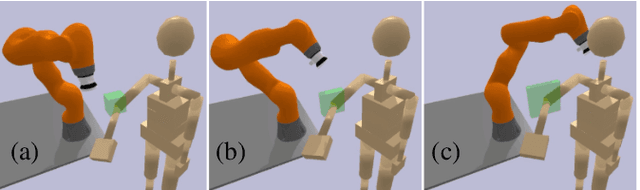
Consistent state estimation is challenging, especially under the epistemic uncertainties arising from learned (nonlinear) dynamic and observation models. In this work, we develop a set-based estimation algorithm, that produces zonotopic state estimates that respect the epistemic uncertainties in the learned models, in addition to the aleatoric uncertainties. Our algorithm guarantees probabilistic consistency, in the sense that the true state is always bounded by the zonotopes, with a high probability. We formally relate our set-based approach with the corresponding probabilistic approach (GP-EKF) in the case of learned (nonlinear) models. In particular, when linearization errors and aleatoric uncertainties are omitted, and epistemic uncertainties are simplified, our set-based approach reduces to its probabilistic counterpart. Our method's improved consistency is empirically demonstrated in both a simulated pendulum domain and a real-world robot-assisted dressing domain, where the robot estimates the configuration of the human arm utilizing the force measurements at its end effector.
Non-prehensile Planar Manipulation via Trajectory Optimization with Complementarity Constraints
Sep 27, 2021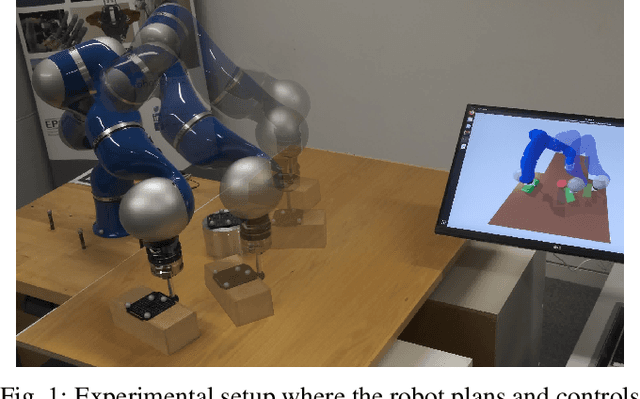
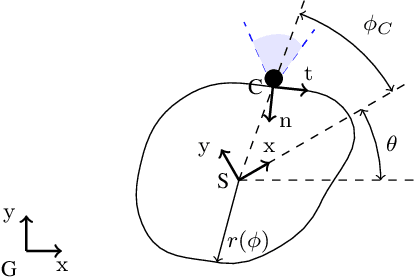
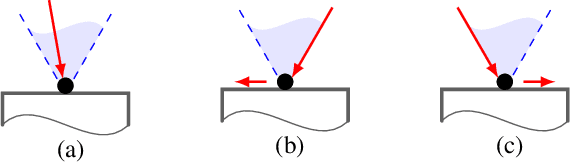
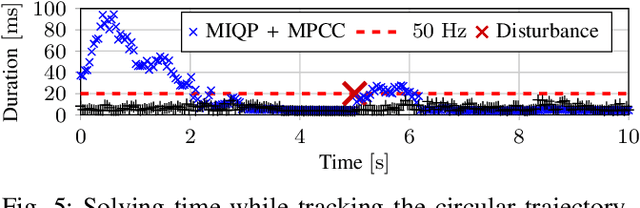
Contact adaption is an essential capability when manipulating objects. Two key contact modes of non-prehensile manipulation are sticking and sliding. This paper presents a Trajectory Optimization (TO) method formulated as a Mathematical Program with Complementarity Constraints (MPCC), which is able to switch between these two modes. We show that this formulation can be applicable to both planning and Model Predictive Control (MPC) for planar manipulation tasks. We numerically compare: (i) our planner against a mixed integer alternative, showing that the MPCC planer converges faster, scales better with respect to time horizon, and can handle environments with obstacles; (ii) our controller against a state-of-the-art mixed integer approach, showing that the MPCC controller achieves better tracking and more consistent computation times. Additionally, we experimentally validate both our planner and controller with the KUKA LWR robot on a range of planar manipulation tasks.
A Unified Model with Inertia Shaping for Highly Dynamic Jumps of Legged Robots
Sep 09, 2021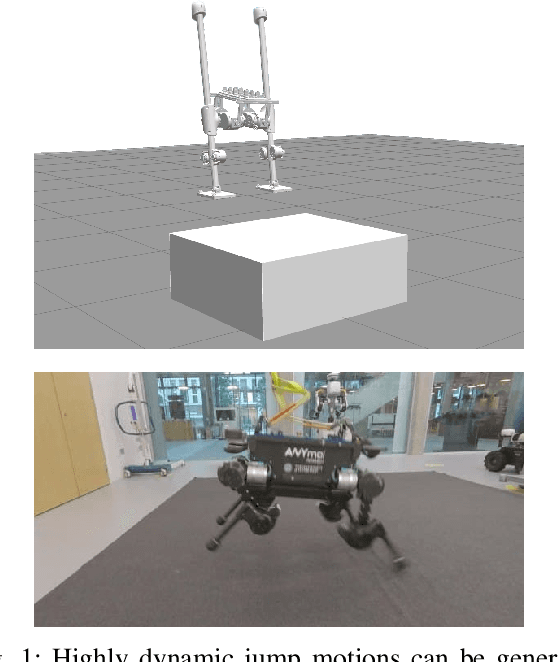
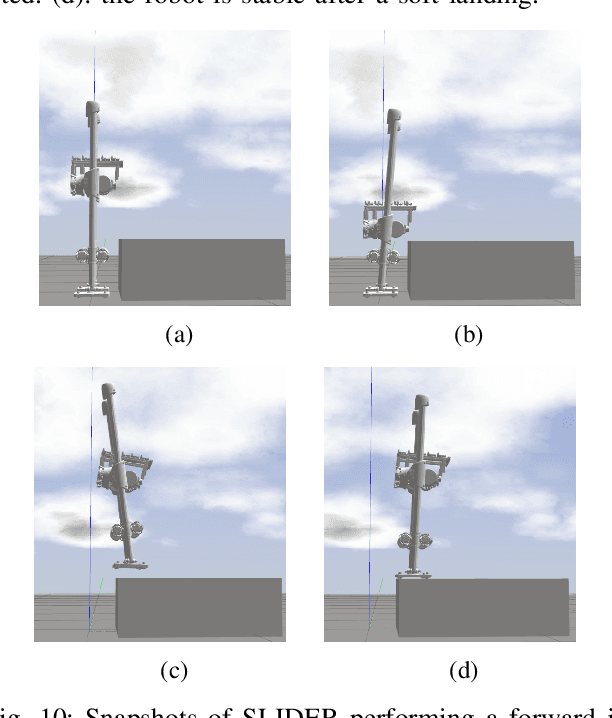
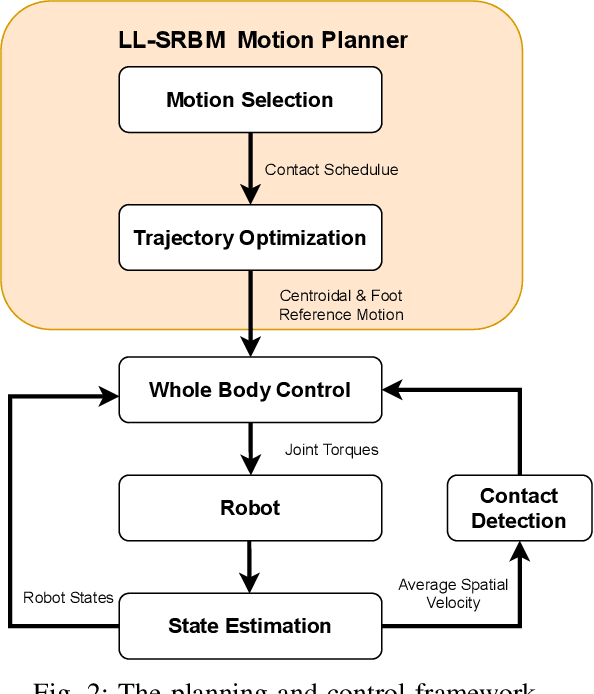
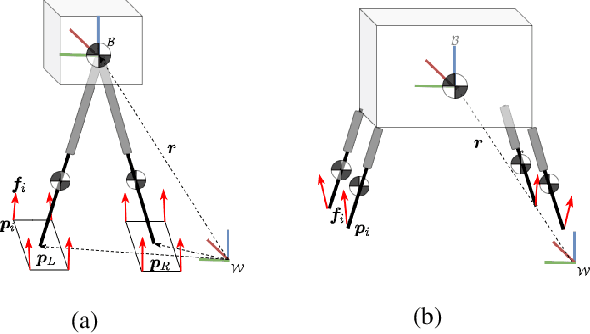
To achieve highly dynamic jumps of legged robots, it is essential to control the rotational dynamics of the robot. In this paper, we aim to improve the jumping performance by proposing a unified model for planning highly dynamic jumps that can approximately model the centroidal inertia. This model abstracts the robot as a single rigid body for the base and point masses for the legs. The model is called the Lump Leg Single Rigid Body Model (LL-SRBM) and can be used to plan motions for both bipedal and quadrupedal robots. By taking the effects of leg dynamics into account, LL-SRBM provides a computationally efficient way for the motion planner to change the centroidal inertia of the robot with various leg configurations. Concurrently, we propose a novel contact detection method by using the norm of the average spatial velocity. After the contact is detected, the controller is switched to force control to achieve a soft landing. Twisting jump and forward jump experiments on the bipedal robot SLIDER and quadrupedal robot ANYmal demonstrate the improved jump performance by actively changing the centroidal inertia. These experiments also show the generalization and the robustness of the integrated planning and control framework.
AcousticFusion: Fusing Sound Source Localization to Visual SLAM in Dynamic Environments
Aug 03, 2021



Dynamic objects in the environment, such as people and other agents, lead to challenges for existing simultaneous localization and mapping (SLAM) approaches. To deal with dynamic environments, computer vision researchers usually apply some learning-based object detectors to remove these dynamic objects. However, these object detectors are computationally too expensive for mobile robot on-board processing. In practical applications, these objects output noisy sounds that can be effectively detected by on-board sound source localization. The directional information of the sound source object can be efficiently obtained by direction of sound arrival (DoA) estimation, but depth estimation is difficult. Therefore, in this paper, we propose a novel audio-visual fusion approach that fuses sound source direction into the RGB-D image and thus removes the effect of dynamic obstacles on the multi-robot SLAM system. Experimental results of multi-robot SLAM in different dynamic environments show that the proposed method uses very small computational resources to obtain very stable self-localization results.
PoseFusion2: Simultaneous Background Reconstruction and Human Shape Recovery in Real-time
Aug 02, 2021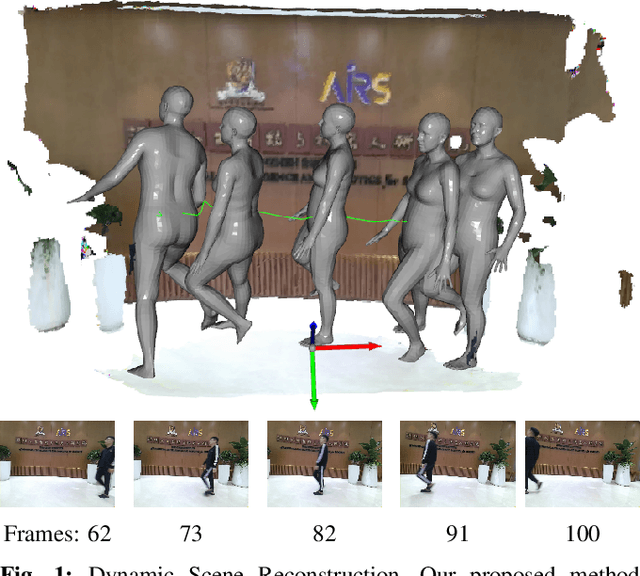



Dynamic environments that include unstructured moving objects pose a hard problem for Simultaneous Localization and Mapping (SLAM) performance. The motion of rigid objects can be typically tracked by exploiting their texture and geometric features. However, humans moving in the scene are often one of the most important, interactive targets - they are very hard to track and reconstruct robustly due to non-rigid shapes. In this work, we present a fast, learning-based human object detector to isolate the dynamic human objects and realise a real-time dense background reconstruction framework. We go further by estimating and reconstructing the human pose and shape. The final output environment maps not only provide the dense static backgrounds but also contain the dynamic human meshes and their trajectories. Our Dynamic SLAM system runs at around 26 frames per second (fps) on GPUs, while additionally turning on accurate human pose estimation can be executed at up to 10 fps.
HapFIC: An Adaptive Force/Position Controller for Safe Environment Interaction in Articulated Systems
Jul 20, 2021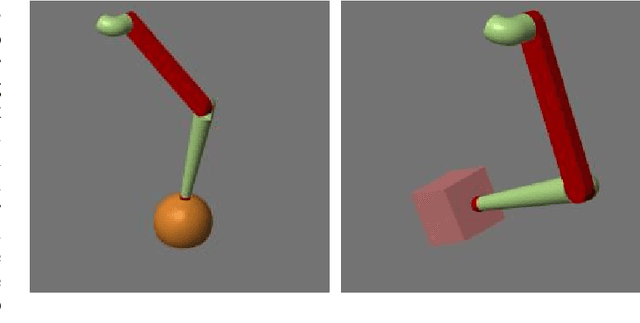
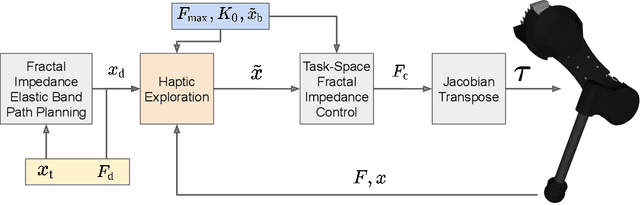
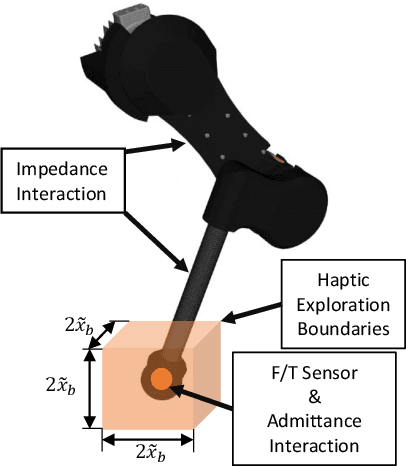
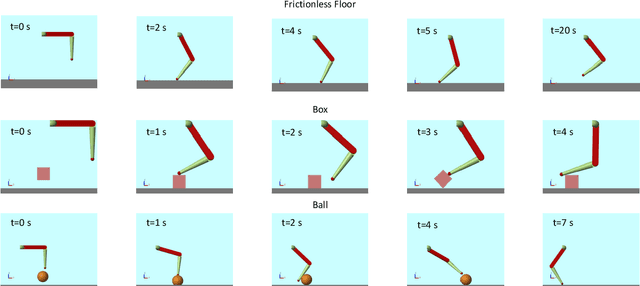
Haptic interaction is essential for the dynamic dexterity of animals, which seamlessly switch from an impedance to an admittance behaviour using the force feedback from their proprioception. However, this ability is extremely challenging to reproduce in robots, especially when dealing with complex interaction dynamics, distributed contacts, and contact switching. Current model-based controllers require accurate interaction modelling to account for contacts and stabilise the interaction. In this manuscript, we propose an adaptive force/position controller that exploits the fractal impedance controller's passivity and non-linearity to execute a finite search algorithm using the force feedback signal from the sensor at the end-effector. The method is computationally inexpensive, opening the possibility to deal with distributed contacts in the future. We evaluated the architecture in physics simulation and showed that the controller can robustly control the interaction with objects of different dynamics without violating the maximum allowable target forces or causing numerical instability even for very rigid objects. The proposed controller can also autonomously deal with contact switching and may find application in multiple fields such as legged locomotion, rehabilitation and assistive robotics.
Co-Designing Robots by Differentiating Motion Solvers
Mar 08, 2021
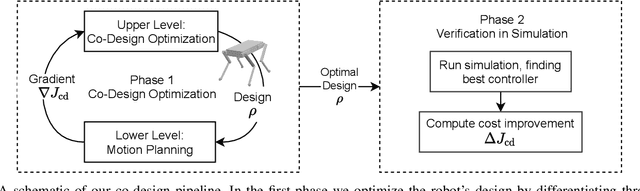

We present a novel algorithm for the computational co-design of legged robots and dynamic maneuvers. Current state-of-the-art approaches are based on random sampling or concurrent optimization. A few recently proposed methods explore the relationship between the gradient of the optimal motion and robot design. Inspired by these approaches, we propose a bilevel optimization approach that exploits the derivatives of the motion planning sub-problem (the inner level) without simplifying assumptions on its structure. Our approach can quickly optimize the robot's morphology while considering its full dynamics, joint limits and physical constraints such as friction cones. It has a faster convergence rate and greater scalability for larger design problems than state-of-the-art approaches based on sampling methods. It also allows us to handle constraints such as the actuation limits, which are important for co-designing dynamic maneuvers. We demonstrate these capabilities by studying jumping and trotting gaits under different design metrics and verify our results in a physics simulator. For these cases, our algorithm converges in less than a third of the number of iterations needed for sampling approaches, and the computation time scales linearly.