 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHapFIC: An Adaptive Force/Position Controller for Safe Environment Interaction in Articulated Systems
Jul 20, 2021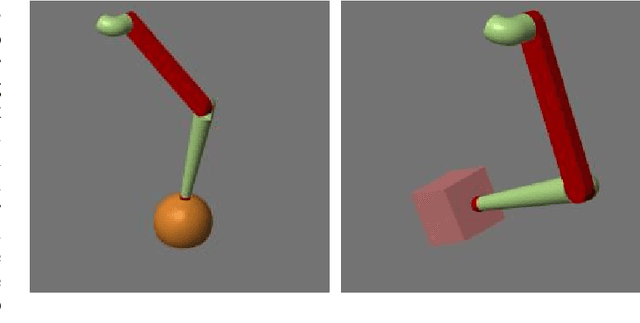
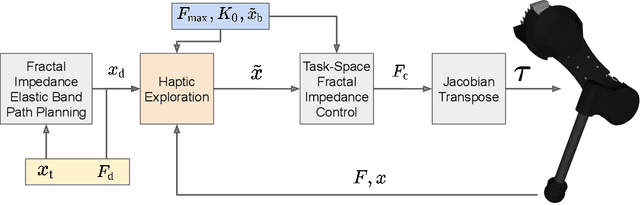
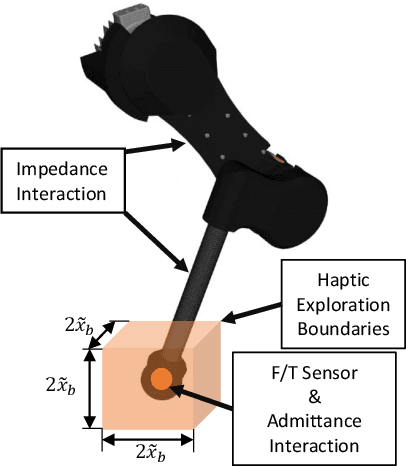
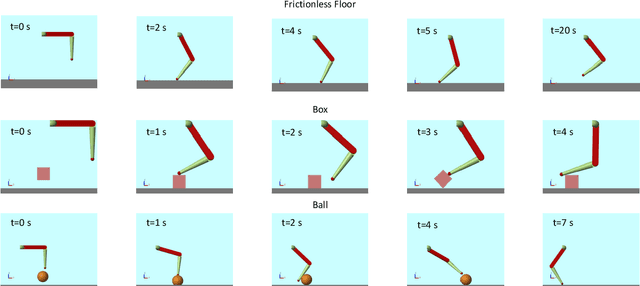
Haptic interaction is essential for the dynamic dexterity of animals, which seamlessly switch from an impedance to an admittance behaviour using the force feedback from their proprioception. However, this ability is extremely challenging to reproduce in robots, especially when dealing with complex interaction dynamics, distributed contacts, and contact switching. Current model-based controllers require accurate interaction modelling to account for contacts and stabilise the interaction. In this manuscript, we propose an adaptive force/position controller that exploits the fractal impedance controller's passivity and non-linearity to execute a finite search algorithm using the force feedback signal from the sensor at the end-effector. The method is computationally inexpensive, opening the possibility to deal with distributed contacts in the future. We evaluated the architecture in physics simulation and showed that the controller can robustly control the interaction with objects of different dynamics without violating the maximum allowable target forces or causing numerical instability even for very rigid objects. The proposed controller can also autonomously deal with contact switching and may find application in multiple fields such as legged locomotion, rehabilitation and assistive robotics.
Variable Autonomy of Whole-body Control for Inspection and Intervention in Industrial Environments using Legged Robots
Apr 06, 2020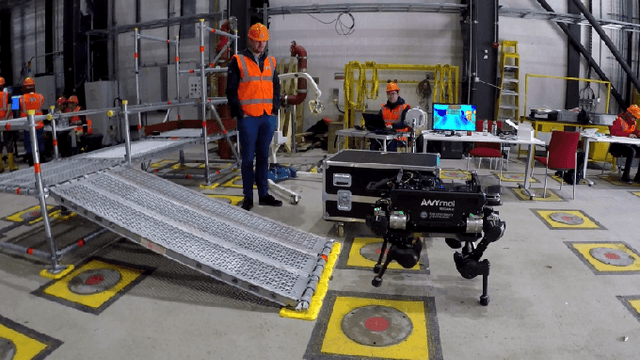
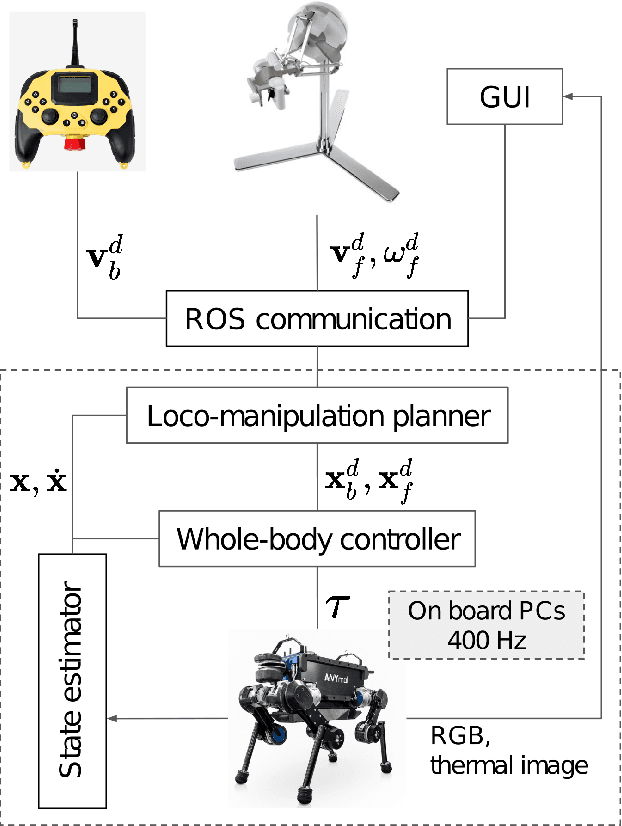
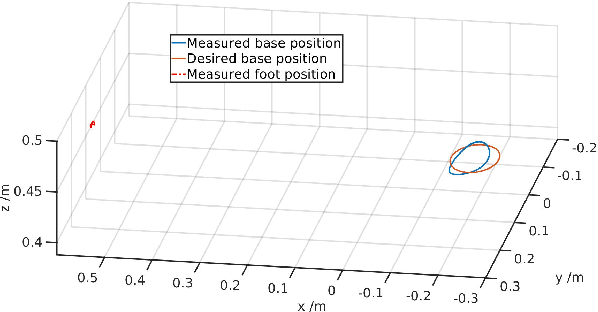
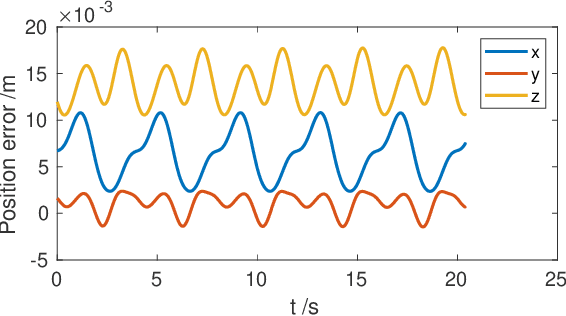
The deployment of robots in industrial and civil scenarios is a viable solution to protect operators from danger and hazards. Shared autonomy is paramount to enable remote control of complex systems such as legged robots, allowing the operator to focus on the essential tasks instead of overly detailed execution. To realize this, we proposed a comprehensive control framework for inspection and intervention using a legged robot and validated the integration of multiple loco-manipulation algorithms optimised for improving the remote operation. The proposed control offers 3 operation modes: fully automated, semi-autonomous, and the haptic interface receiving onsite physical interaction for assisting teleoperation. Our contribution is the design of a QP-based semi-analytical whole-body control, which is the key to the various task completion subject to internal and external constraints. We demonstrated the versatility of the whole-body control in terms of decoupling tasks, singularity toleration and constraint satisfaction. We deployed our solution in field trials and evaluated in an emergency setting by an E-stop while the robot was clearing road barrier and traversing difficult terrains.
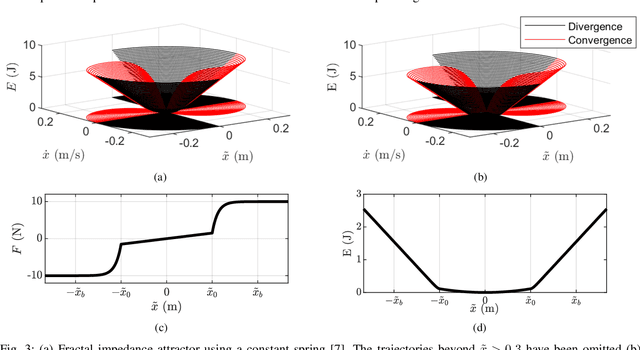
Bio-mimetic Adaptive Force/Position Control Using Fractal Impedance
Mar 03, 2020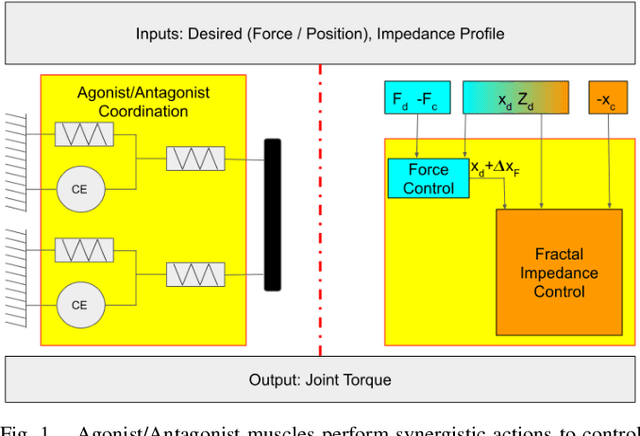
The ability of animals to interact with complex dynamics is unmatched in robots. Especially important to the interaction performances is the online adaptation of body dynamics, which can be modeled as an impedance behaviour. However, the variable impedance controller still possesses a challenge in the current control frameworks due to the difficulties of retaining stability when adapting the controller gains. The fractal impedance controller has been recently proposed to solve this issue. However, it still has limitations such as sudden jumps in force when it starts to converge to the desired position and the lack of a force feedback loop. In this manuscript, two improvements are made to the control framework to solve these limitations. The force discontinuity has been addressed introducing a modulation of the impedance via a virtual antagonist that modulates the output force. The force tracking has been modeled after the parallel force/position controller architecture. In contrast to traditional methods, the fractal impedance controller enables the implementation of a search algorithm on the force feedback to adapt its behaviour on the external environment instead of on relying on \textit{a priori} knowledge of the external dynamics. Preliminary simulation results presented in this paper show the feasibility of the proposed approach, and it allows to evaluate the trade-off that needs to be made when relying on the proposed controller for interaction. In conclusion, the proposed method mimics the behaviour of an agonist/antagonist system adapting to unknown external dynamics, and it may find application in computational neuroscience, haptics, and interaction control.
Optimizing Dynamic Trajectories for Robustness to Disturbances Using Polytopic Projections
Mar 01, 2020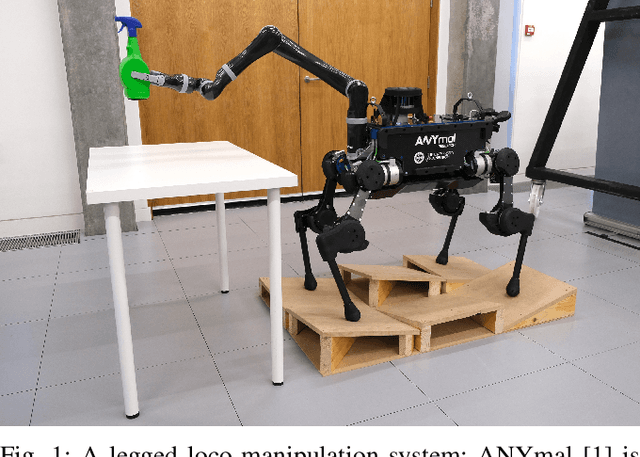
This paper focuses on robustness to disturbance forces and uncertain payloads. We present a novel formulation to optimize the robustness of dynamic trajectories. A straightforward transcription of this formulation into a nonlinear programming problem is not tractable for state-of-the-art solvers, but it is possible to overcome this complication by exploiting the structure induced by the kinematics of the robot. The non-trivial transcription proposed allows trajectory optimization frameworks to converge to highly robust dynamic solutions. We demonstrate the results of our approach using a quadruped robot equipped with a manipulator.
Safe and Compliant Control of Redundant Robots Using a Stack of Passive Task-Space Controllers
Feb 27, 2020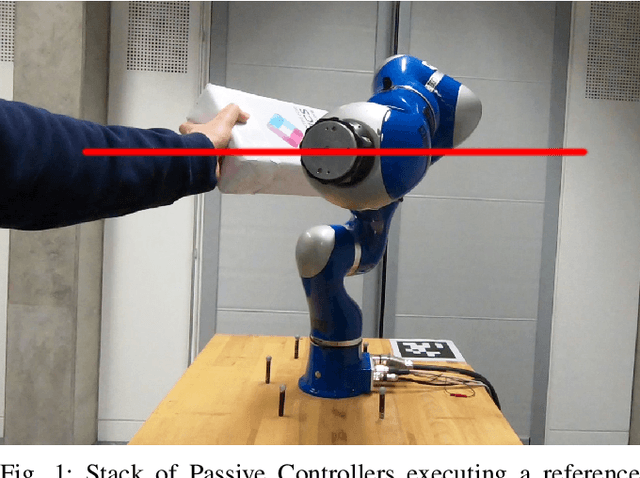
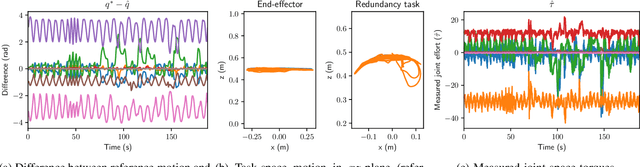
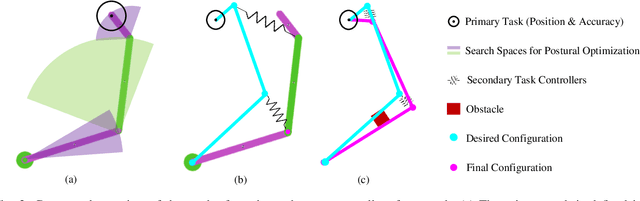
Safe and compliant control of dynamic systems in interaction with the environment, e.g., in shared workspaces, continues to represent a major challenge. Mismatches in the dynamic model of the robots, numerical singularities, and the intrinsic environmental unpredictability are all contributing factors.Online optimization of impedance controllers has recently shown great promise in addressing this challenge, however, their performance is not sufficiently robust to be deployed in challenging environments. This work proposes a compliant control method for redundant manipulators based on a stack of multiple passive task-space controllers. Our control framework of passive controllers is inherently stable, numerically well-conditioned (as no matrix inversions are required), and computationally inexpensive (as no optimization is used). We leverage and introduce a novel stiffness profile for a recently proposed passive controller with smooth transitions between the divergence and convergence phases making it particularly suitable when multiple passive controllers are combined in a stack. Our experimental results demonstrate that the proposed method achieves sub-centimeter tracking performance during dynamic demanding tasks with fast-changing references, while remaining safe to interact with and robust to singularities. The proposed framework achieves this without knowledge of the robot dynamics and thanks to its passivity is intrinsically stable. The data further shows that the robot can fully take advantage of the null-space to maintain the primary task accuracy while compensating for external perturbations.
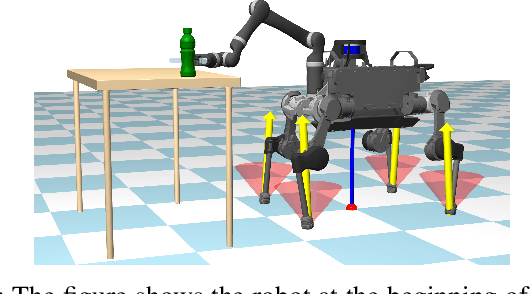
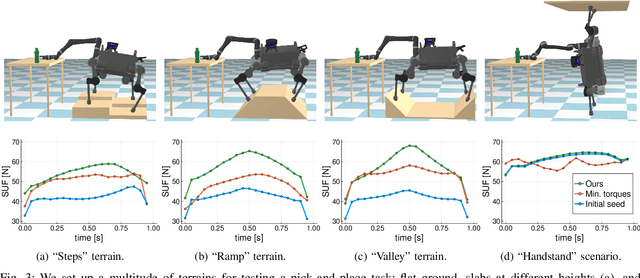
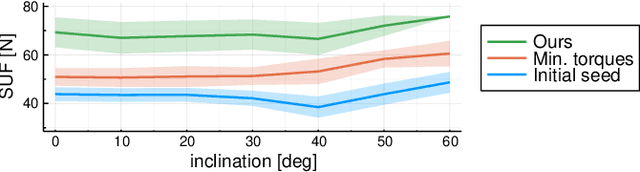
Optimisation of Body-ground Contact for Augmenting Whole-Body Loco-manipulation of Quadruped Robots
Feb 24, 2020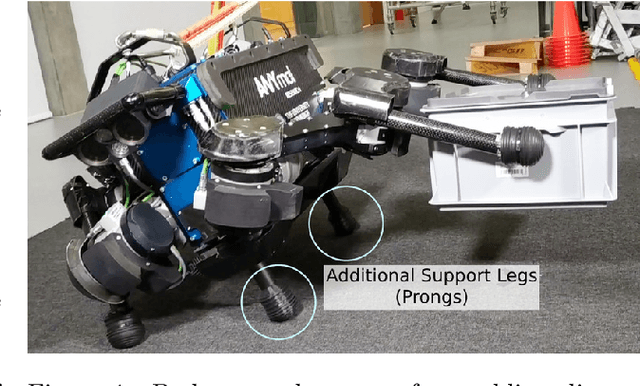

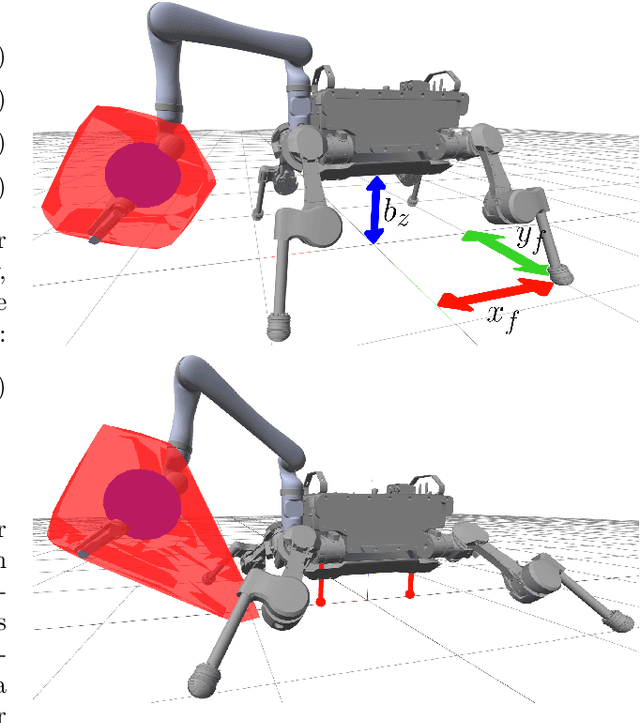
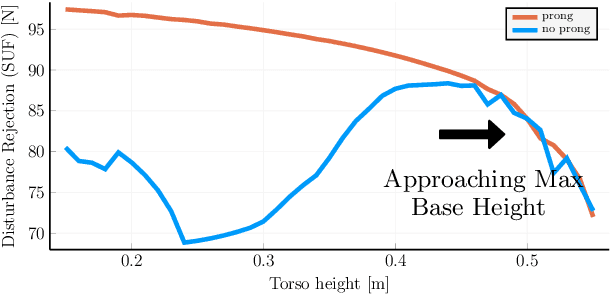
Legged robots have great potential to perform loco-manipulation tasks, yet it is challenging to keep the robot balanced while it interacts with the environment. In this paper we study the use of additional contact points for maximising the robustness of loco-manipulation motions. Specifically, body-ground contact is studied for enhancing robustness and manipulation capabilities of quadrupedal robots. We propose to equip the robot with prongs: small legs rigidly attached to the body which ensure body-ground contact occurs in controllable point-contacts. The effect of these prongs on robustness is quantified by computing the Smallest Unrejectable Force (SUF), a measure of robustness related to Feasible Wrench Polytopes. We apply the SUF to assess the robustness of the system, and propose an effective approximation of the SUF that can be computed at near-real-time speed. We design a hierarchical quadratic programming based whole-body controller that controls stable interaction when the prongs are in contact with the ground. This novel concept of using prongs and the resulting control framework are all implemented on hardware to validate the effectiveness of the increased robustness and newly enabled loco-manipulation tasks, such as obstacle clearance and manipulation of a large object.
Bounded haptic teleoperation of a quadruped robot's foot posture for sensing and manipulation
Dec 16, 2019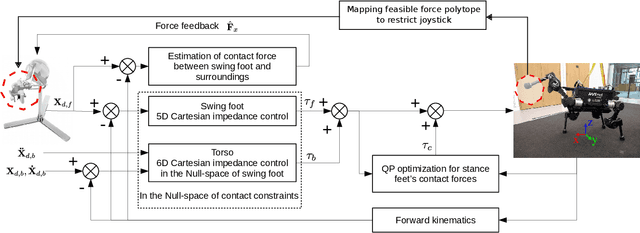
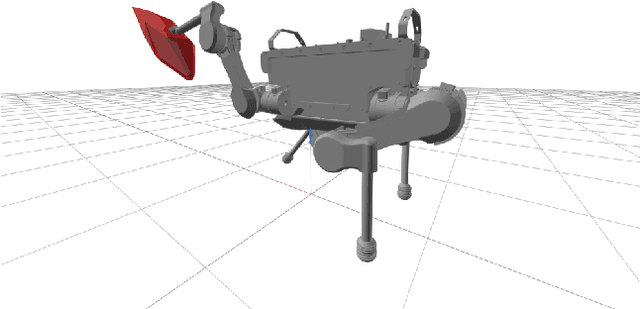
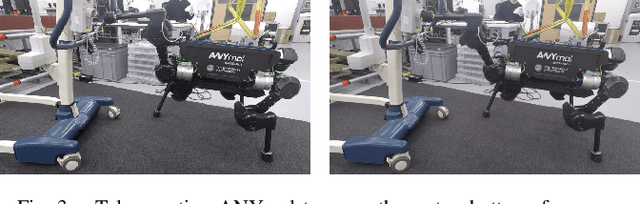
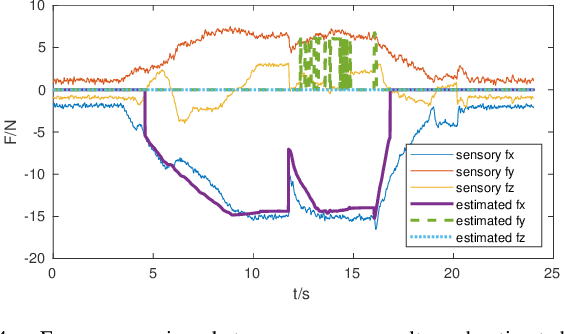
This paper presents a control framework to teleoperate a quadruped robot's foot for operator-guided haptic exploration of the environment. Since one leg of a quadruped robot typically only has 3 actuated degrees of freedom (DoFs), the torso is employed to assist foot posture control via a hierarchical whole-body controller. The foot and torso postures are controlled by two analytical Cartesian impedance controllers cascaded by a null space projector. The contact forces acting on supporting feet are optimized by quadratic programming (QP). The foot's Cartesian impedance controller may also estimate contact forces from trajectory tracking errors, and relay the force-feedback to the operator. A 7D haptic joystick, Sigma.7, transmits motion commands to the quadruped robot ANYmal, and renders the force feedback. Furthermore, the joystick's motion is bounded by mapping the foot's feasible force polytope constrained by the friction cones and torque limits in order to prevent the operator from driving the robot to slipping or falling over. Experimental results demonstrate the efficiency of the proposed framework.
RRT-CoLearn: towards kinodynamic planning without numerical trajectory optimization
Oct 27, 2017
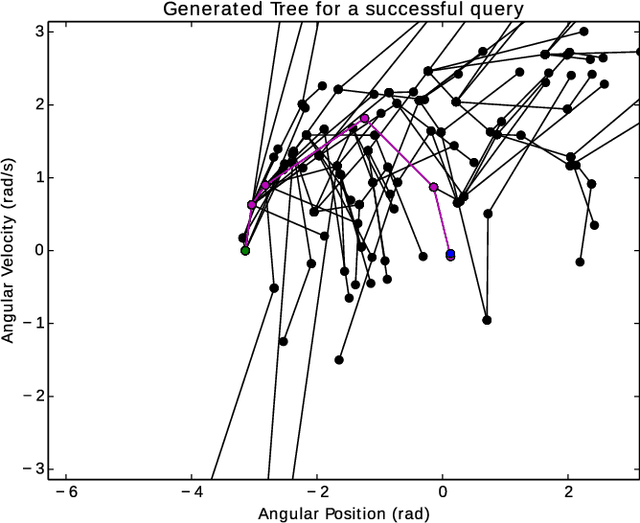
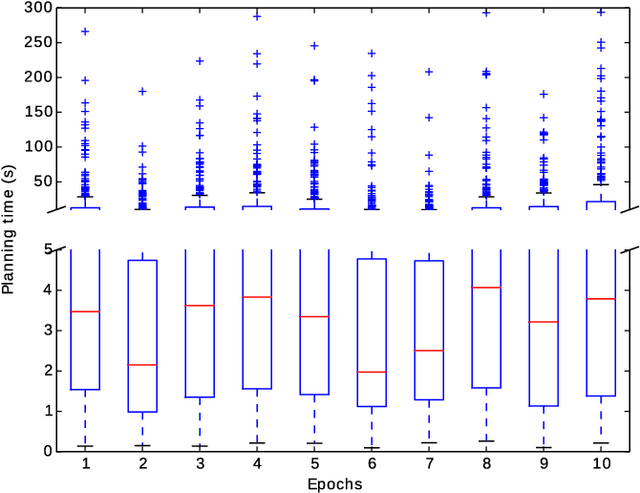
Sampling-based kinodynamic planners, such as Rapidly-exploring Random Trees (RRTs), pose two fundamental challenges: computing a reliable (pseudo-)metric for the distance between two randomly sampled nodes, and computing a steering input to connect the nodes. The core of these challenges is a Two Point Boundary Value Problem, which is known to be NP-hard. Recently, the distance metric has been approximated using supervised learning, reducing computation time drastically. The previous work on such learning RRTs use direct optimal control to generate the data for supervised learning. This paper proposes to use indirect optimal control instead, because it provides two benefits: it reduces the computational effort to generate the data, and it provides a low dimensional parametrization of the action space. The latter allows us to learn both the distance metric and the steering input to connect two nodes. This eliminates the need for a local planner in learning RRTs. Experimental results on a pendulum swing up show 10-fold speed-up in both the offline data generation and the online planning time, leading to at least a 10-fold speed-up in the overall planning time.