 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Model with Inertia Shaping for Highly Dynamic Jumps of Legged Robots
Sep 09, 2021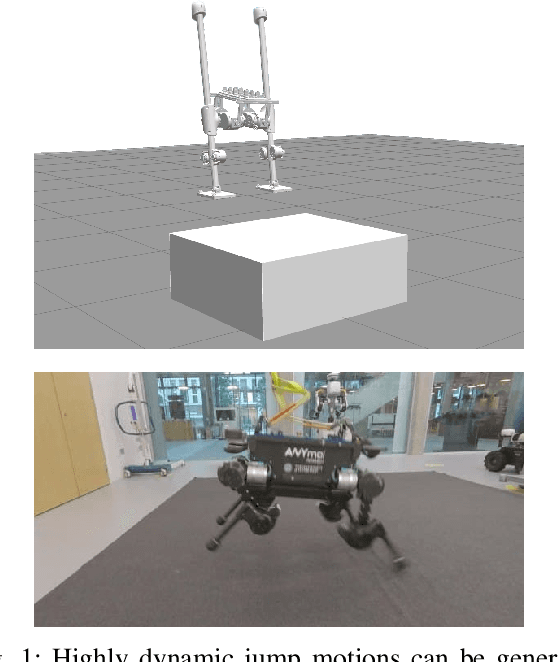
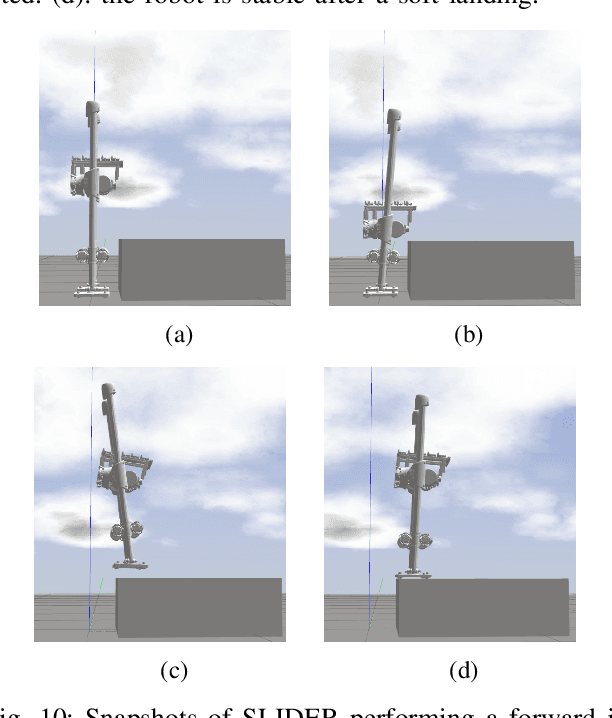
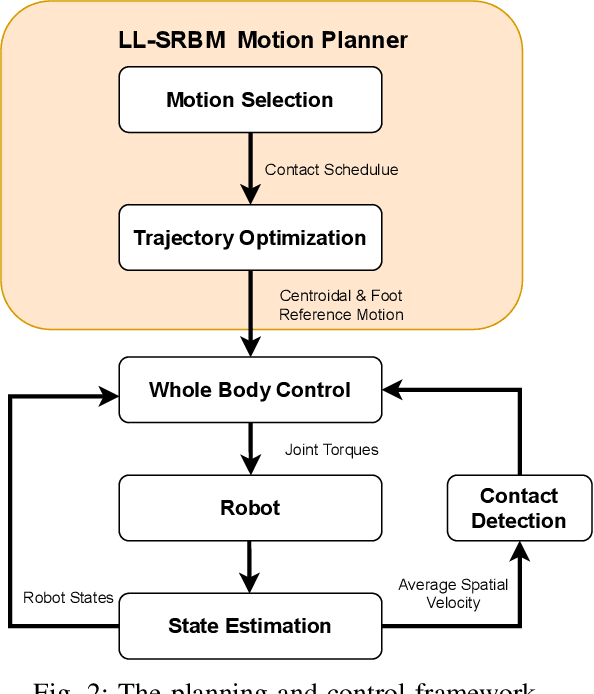
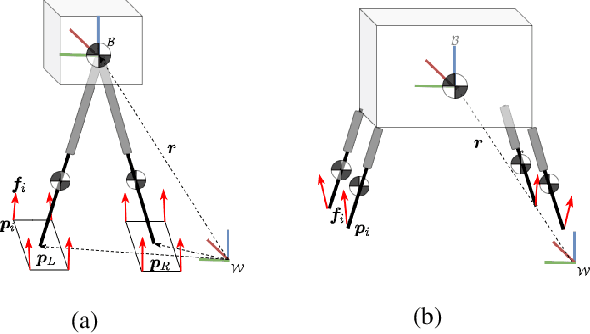
To achieve highly dynamic jumps of legged robots, it is essential to control the rotational dynamics of the robot. In this paper, we aim to improve the jumping performance by proposing a unified model for planning highly dynamic jumps that can approximately model the centroidal inertia. This model abstracts the robot as a single rigid body for the base and point masses for the legs. The model is called the Lump Leg Single Rigid Body Model (LL-SRBM) and can be used to plan motions for both bipedal and quadrupedal robots. By taking the effects of leg dynamics into account, LL-SRBM provides a computationally efficient way for the motion planner to change the centroidal inertia of the robot with various leg configurations. Concurrently, we propose a novel contact detection method by using the norm of the average spatial velocity. After the contact is detected, the controller is switched to force control to achieve a soft landing. Twisting jump and forward jump experiments on the bipedal robot SLIDER and quadrupedal robot ANYmal demonstrate the improved jump performance by actively changing the centroidal inertia. These experiments also show the generalization and the robustness of the integrated planning and control framework.
OCRTOC: A Cloud-Based Competition and Benchmark for Robotic Grasping and Manipulation
Apr 23, 2021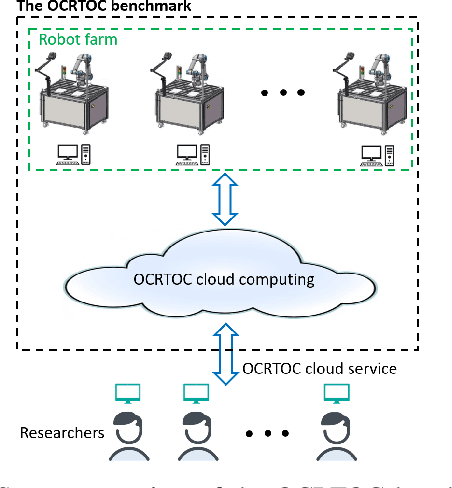
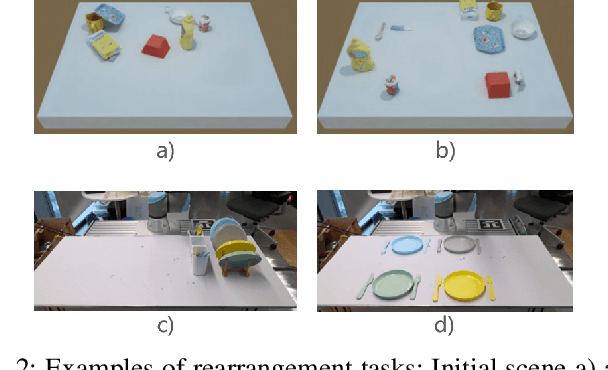
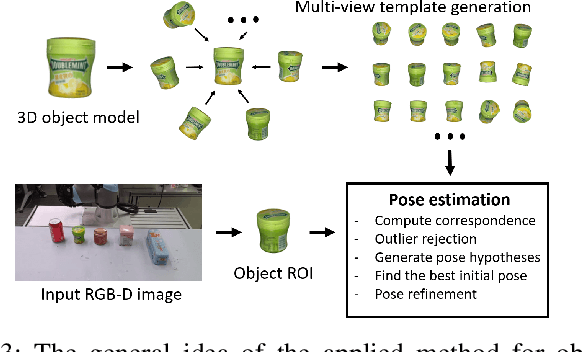
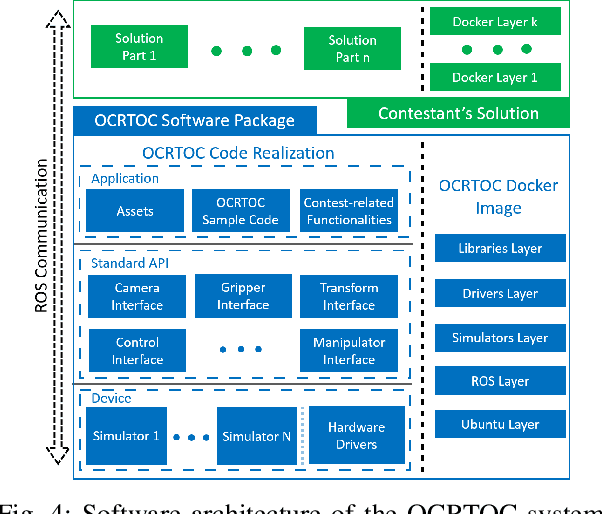
In this paper, we propose a cloud-based benchmark for robotic grasping and manipulation, called the OCRTOC benchmark. The benchmark focuses on the object rearrangement problem, specifically table organization tasks. We provide a set of identical real robot setups and facilitate remote experiments of standardized table organization scenarios in varying difficulties. In this workflow, users upload their solutions to our remote server and their code is executed on the real robot setups and scored automatically. After each execution, the OCRTOC team resets the experimental setup manually. We also provide a simulation environment that researchers can use to develop and test their solutions. With the OCRTOC benchmark, we aim to lower the barrier of conducting reproducible research on robotic grasping and manipulation and accelerate progress in this field. Executing standardized scenarios on identical real robot setups allows us to quantify algorithm performances and achieve fair comparisons. Using this benchmark we held a competition in the 2020 International Conference on Intelligence Robots and Systems (IROS 2020). In total, 59 teams took part in this competition worldwide. We present the results and our observations of the 2020 competition, and discuss our adjustments and improvements for the upcoming OCRTOC 2021 competition. The homepage of the OCRTOC competition is www.ocrtoc.org, and the OCRTOC software package is available at https://github.com/OCRTOC/OCRTOC_software_package.
Robust Planning and Control for Dynamic Quadrupedal Locomotion with Adaptive Feet
Oct 23, 2020

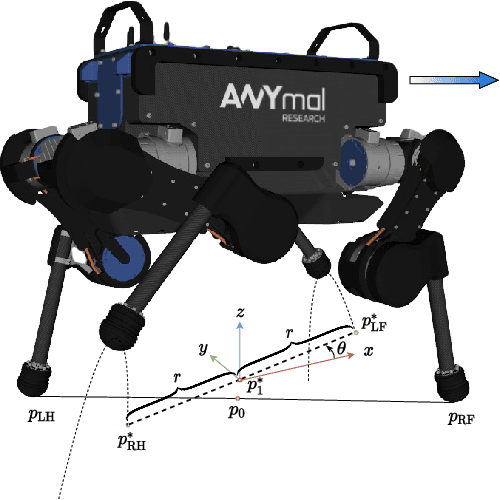
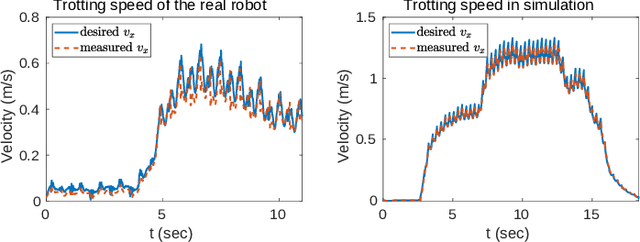
In this paper, we aim to improve the robustness of dynamic quadrupedal locomotion through three aspects: 1) fast model predictive foothold planning, 2) LQR control for robust motion tracking and 3) adaptive feet for terrain adaptation. In our proposed planning and control framework, foothold plans are updated at 400 Hz considering the current robot state and an LQR controller generates optimal feedback gains for motion tracking. The LQR optimal gain matrix with non-zero off-diagonal elements leverages the coupling of dynamics to compensate for system underactuation, such as a quadruped robot with passive ankles. The specially designed foot with adaptive sole aims at improving the traversability of rough terrains with rocks, loose gravel and rubble by enlarging the contact surfaces with ground. Experiments on the quadruped ANYmal demonstrate the effectiveness of the proposed method for robust dynamic locomotion given external disturbances and environmental uncertainties.
Online Dynamic Motion Planning and Control for Wheeled Biped Robots
Mar 07, 2020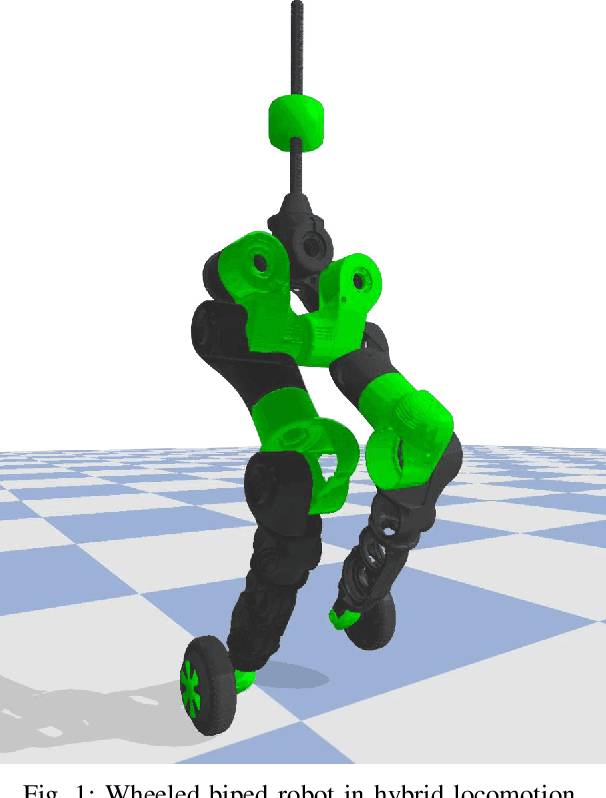
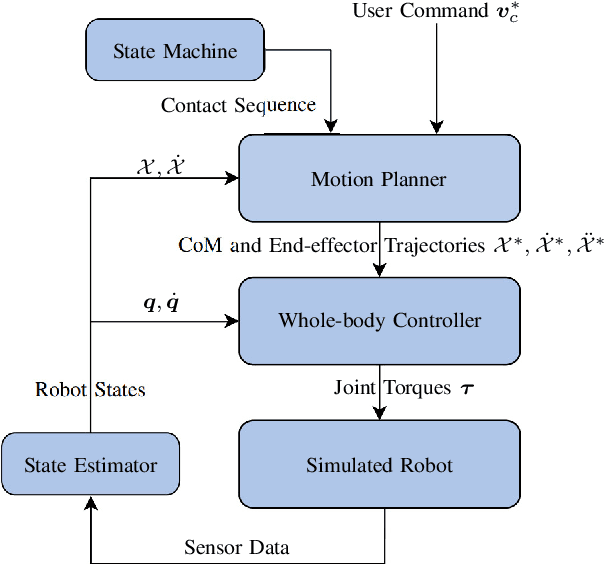

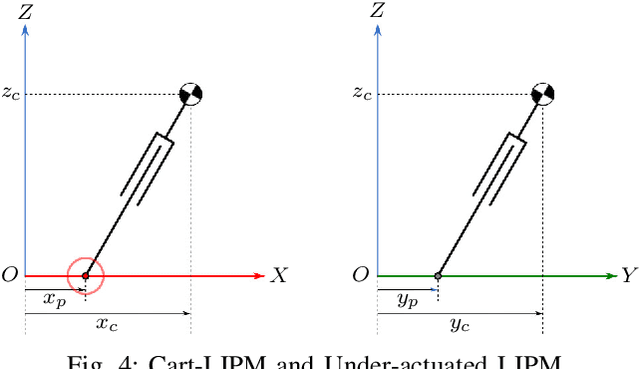
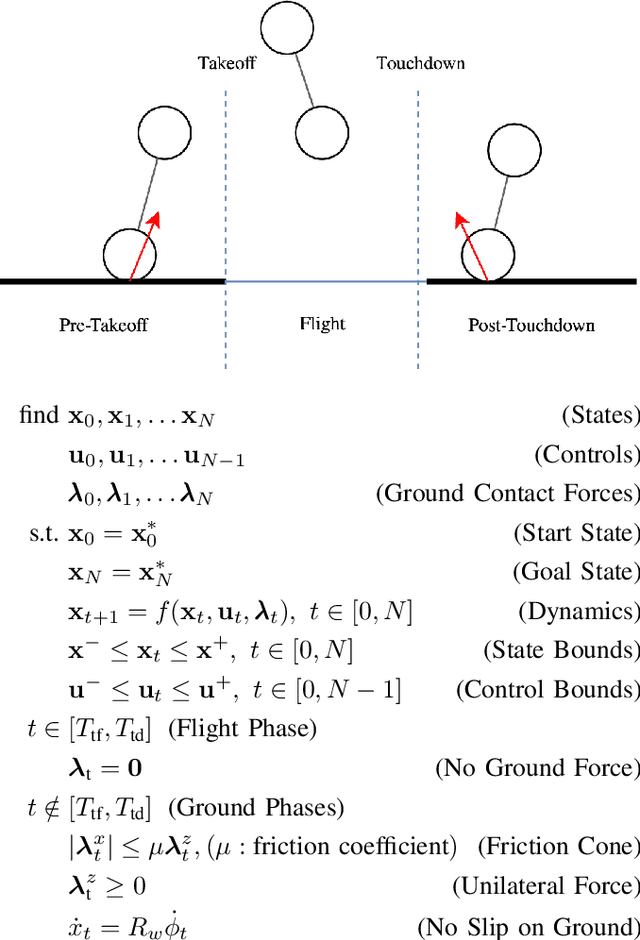
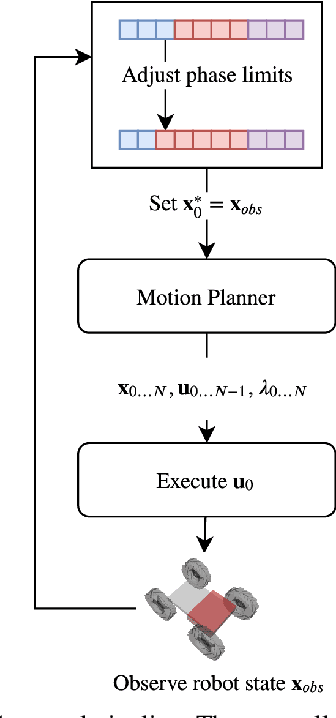
Wheeled-legged robots combine the efficiency of wheeled robots when driving on suitably flat surfaces and versatility of legged robots when stepping over or around obstacles. This paper introduces a planning and control framework to realise dynamic locomotion for wheeled biped robots. We propose the Cart-Linear Inverted Pendulum Model (Cart-LIPM) as a template model for the rolling motion and the under-actuated LIPM for contact changes while walking. The generated motion is then tracked by an inverse dynamic whole-body controller which coordinates all joints, including the wheels. The framework has a hierarchical structure and is implemented in a model predictive control (MPC) fashion. To validate the proposed approach for hybrid motion generation, two scenarios involving different types of obstacles are designed in simulation. To the best of our knowledge, this is the first time that such online dynamic hybrid locomotion has been demonstrated on wheeled biped robots.
Modeling and Control of a Hybrid Wheeled Jumping Robot
Mar 03, 2020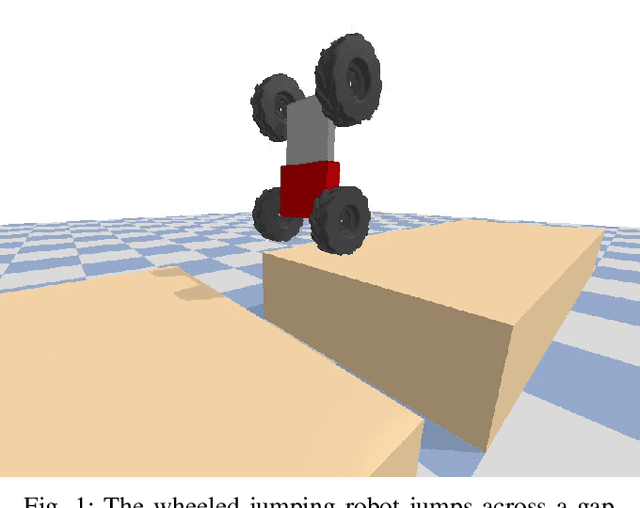
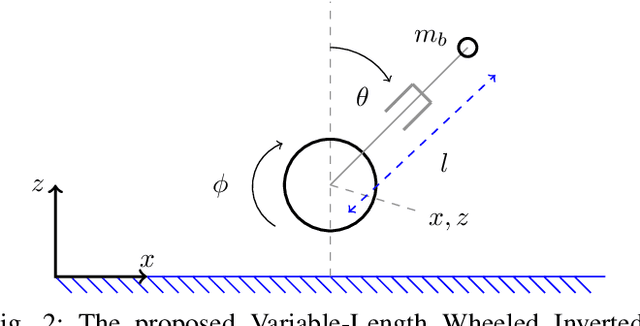
In this paper, we study a wheeled robot with a prismatic extension joint. This allows the robot to build up momentum to perform jumps over obstacles and to swing up to the upright position after the loss of balance. We propose a template model for the class of such two-wheeled jumping robots. This model can be considered as the simplest wheeled-legged system. We provide an analytical derivation of the system dynamics which we use inside a model predictive controller (MPC). We study the behavior of the model and demonstrate highly dynamic motions such as swing-up and jumping. Furthermore, these motions are discovered through optimization from first principles. We evaluate the controller on a variety of tasks and uneven terrains in a simulator.
Nonlinear Model Predictive Control for Robust Bipedal Locomotion Exploring CoM Height and Angular Momentum Changes
Feb 18, 2019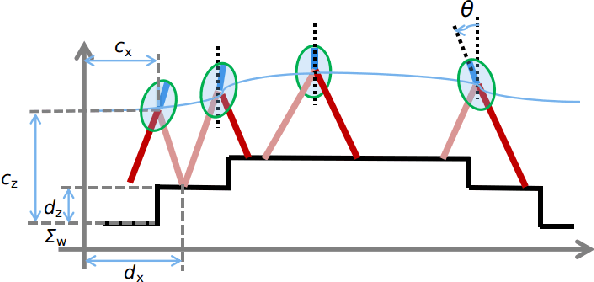
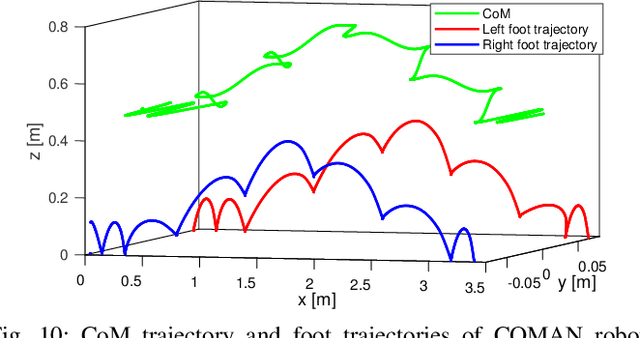
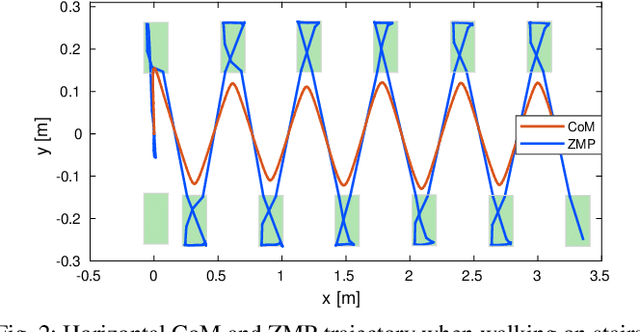
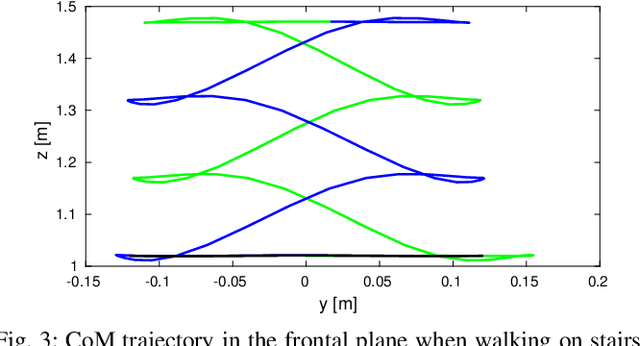
Human beings can make use of various reactive strategies, e.g. foot location adjustment and upper-body inclination, to keep balance while walking under dynamic disturbances. In this work, we propose a novel Nonlinear Model Predictive Control (NMPC) framework for versatile bipedal gait pattern generation, with the capabilities of footstep adjustment, Center of Mass (CoM) height variation and angular momentum adaptation. These features are realized by constraining the Zero Moment Point motion with considering the variable CoM height and angular momentum change of the Inverted Pendulum plus Flywheel Model. In addition, the NMPC framework also takes into account the constraints of footstep location, CoM vertical motion, upper-body inclination and joint torques, and is finally formulated as a quadratically constrained quadratic program. Therefore, it can be solved efficiently by Sequential Quadratic Programming. Using this unified framework, versatile walking pattern with exploiting time-varying CoM height trajectory and angular momentum changes can be generated based only on the terrain information input. Furthermore, the improved capability for balance recovery under external pushes has been demonstrated through simulation studies.