 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Robot Platform for Robotic Triage Combining Onboard Sensing and Foundation Models
Dec 09, 2025



This report presents a heterogeneous robotic system designed for remote primary triage in mass-casualty incidents (MCIs). The system employs a coordinated air-ground team of unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) to locate victims, assess their injuries, and prioritize medical assistance without risking the lives of first responders. The UAV identify and provide overhead views of casualties, while UGVs equipped with specialized sensors measure vital signs and detect and localize physical injuries. Unlike previous work that focused on exploration or limited medical evaluation, this system addresses the complete triage process: victim localization, vital sign measurement, injury severity classification, mental status assessment, and data consolidation for first responders. Developed as part of the DARPA Triage Challenge, this approach demonstrates how multi-robot systems can augment human capabilities in disaster response scenarios to maximize lives saved.
Bridging the Resource Gap: Deploying Advanced Imitation Learning Models onto Affordable Embedded Platforms
Nov 18, 2024



Advanced imitation learning with structures like the transformer is increasingly demonstrating its advantages in robotics. However, deploying these large-scale models on embedded platforms remains a major challenge. In this paper, we propose a pipeline that facilitates the migration of advanced imitation learning algorithms to edge devices. The process is achieved via an efficient model compression method and a practical asynchronous parallel method Temporal Ensemble with Dropped Actions (TEDA) that enhances the smoothness of operations. To show the efficiency of the proposed pipeline, large-scale imitation learning models are trained on a server and deployed on an edge device to complete various manipulation tasks.
A Two-Step Learning and Interpolation Method for Location-Based Channel Database
Dec 04, 2018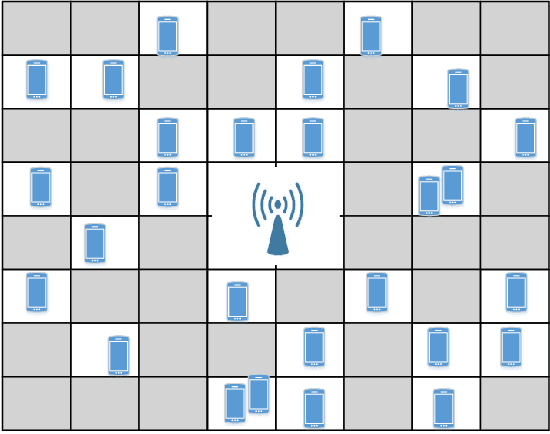
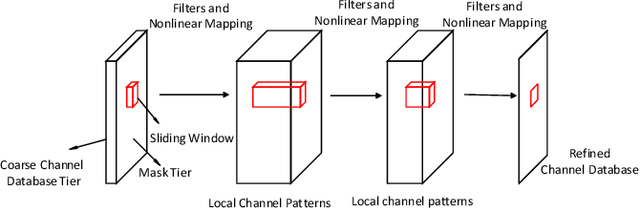

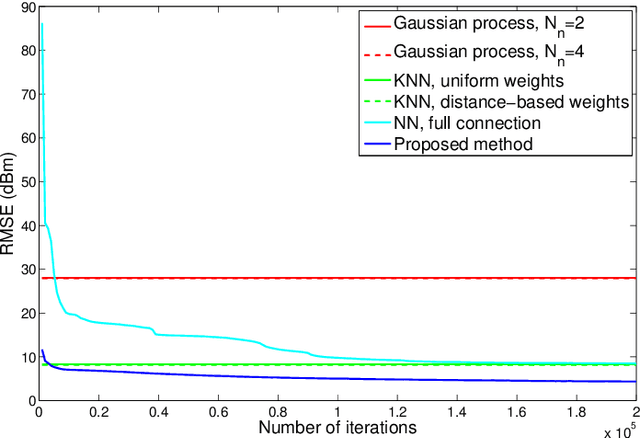
Timely and accurate knowledge of channel state information (CSI) is necessary to support scheduling operations at both physical and network layers. In order to support pilot-free channel estimation in cell sleeping scenarios, we propose to adopt a channel database that stores the CSI as a function of geographic locations. Such a channel database is generated from historical user records, which usually can not cover all the locations in the cell. Therefore, we develop a two-step interpolation method to infer the channels at the uncovered locations. The method firstly applies the K-nearest-neighbor method to form a coarse database and then refines it with a deep convolutional neural network. When applied to the channel data generated by ray tracing software, our method shows a great advantage in performance over the conventional interpolation methods.