 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-Robot Platform for Robotic Triage Combining Onboard Sensing and Foundation Models
Dec 09, 2025



This report presents a heterogeneous robotic system designed for remote primary triage in mass-casualty incidents (MCIs). The system employs a coordinated air-ground team of unmanned aerial vehicles (UAVs) and unmanned ground vehicles (UGVs) to locate victims, assess their injuries, and prioritize medical assistance without risking the lives of first responders. The UAV identify and provide overhead views of casualties, while UGVs equipped with specialized sensors measure vital signs and detect and localize physical injuries. Unlike previous work that focused on exploration or limited medical evaluation, this system addresses the complete triage process: victim localization, vital sign measurement, injury severity classification, mental status assessment, and data consolidation for first responders. Developed as part of the DARPA Triage Challenge, this approach demonstrates how multi-robot systems can augment human capabilities in disaster response scenarios to maximize lives saved.
Ant-inspired Walling Strategies for Scalable Swarm Separation: Reinforcement Learning Approaches Based on Finite State Machines
Oct 26, 2025In natural systems, emergent structures often arise to balance competing demands. Army ants, for example, form temporary "walls" that prevent interference between foraging trails. Inspired by this behavior, we developed two decentralized controllers for heterogeneous robotic swarms to maintain spatial separation while executing concurrent tasks. The first is a finite-state machine (FSM)-based controller that uses encounter-triggered transitions to create rigid, stable walls. The second integrates FSM states with a Deep Q-Network (DQN), dynamically optimizing separation through emergent "demilitarized zones." In simulation, both controllers reduce mixing between subgroups, with the DQN-enhanced controller improving adaptability and reducing mixing by 40-50% while achieving faster convergence.
PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
Apr 07, 2024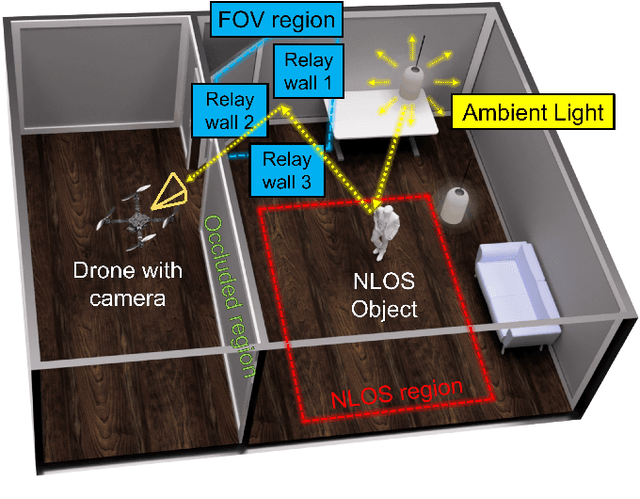
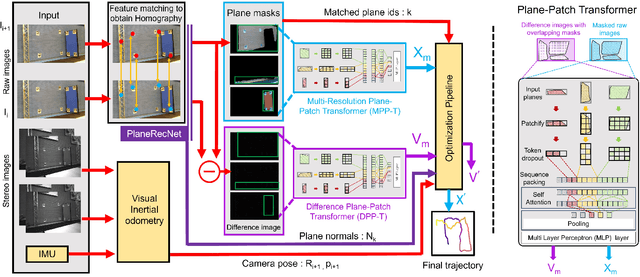
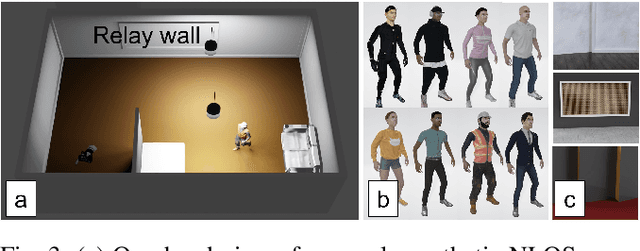
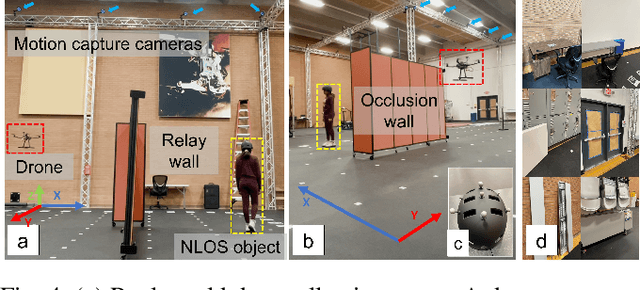
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
Stereo Visual Odometry with Deep Learning-Based Point and Line Feature Matching using an Attention Graph Neural Network
Aug 02, 2023



Robust feature matching forms the backbone for most Visual Simultaneous Localization and Mapping (vSLAM), visual odometry, 3D reconstruction, and Structure from Motion (SfM) algorithms. However, recovering feature matches from texture-poor scenes is a major challenge and still remains an open area of research. In this paper, we present a Stereo Visual Odometry (StereoVO) technique based on point and line features which uses a novel feature-matching mechanism based on an Attention Graph Neural Network that is designed to perform well even under adverse weather conditions such as fog, haze, rain, and snow, and dynamic lighting conditions such as nighttime illumination and glare scenarios. We perform experiments on multiple real and synthetic datasets to validate the ability of our method to perform StereoVO under low visibility weather and lighting conditions through robust point and line matches. The results demonstrate that our method achieves more line feature matches than state-of-the-art line matching algorithms, which when complemented with point feature matches perform consistently well in adverse weather and dynamic lighting conditions.