 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelational inductive biases, deep learning, and graph networks
Oct 17, 2018
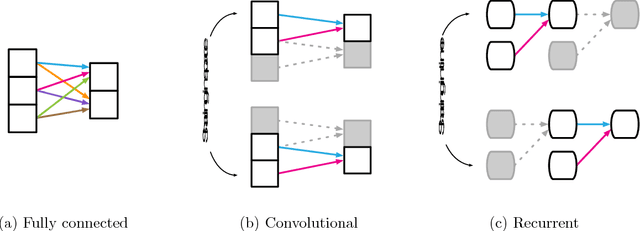
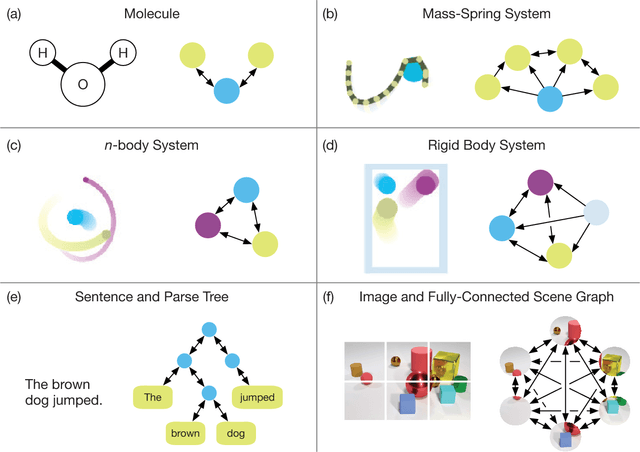
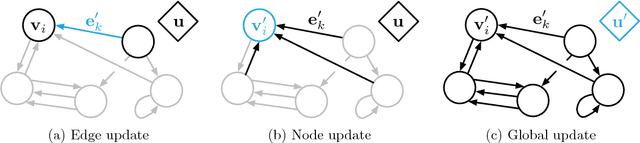
Artificial intelligence (AI) has undergone a renaissance recently, making major progress in key domains such as vision, language, control, and decision-making. This has been due, in part, to cheap data and cheap compute resources, which have fit the natural strengths of deep learning. However, many defining characteristics of human intelligence, which developed under much different pressures, remain out of reach for current approaches. In particular, generalizing beyond one's experiences--a hallmark of human intelligence from infancy--remains a formidable challenge for modern AI. The following is part position paper, part review, and part unification. We argue that combinatorial generalization must be a top priority for AI to achieve human-like abilities, and that structured representations and computations are key to realizing this objective. Just as biology uses nature and nurture cooperatively, we reject the false choice between "hand-engineering" and "end-to-end" learning, and instead advocate for an approach which benefits from their complementary strengths. We explore how using relational inductive biases within deep learning architectures can facilitate learning about entities, relations, and rules for composing them. We present a new building block for the AI toolkit with a strong relational inductive bias--the graph network--which generalizes and extends various approaches for neural networks that operate on graphs, and provides a straightforward interface for manipulating structured knowledge and producing structured behaviors. We discuss how graph networks can support relational reasoning and combinatorial generalization, laying the foundation for more sophisticated, interpretable, and flexible patterns of reasoning. As a companion to this paper, we have released an open-source software library for building graph networks, with demonstrations of how to use them in practice.
Relational Forward Models for Multi-Agent Learning
Sep 28, 2018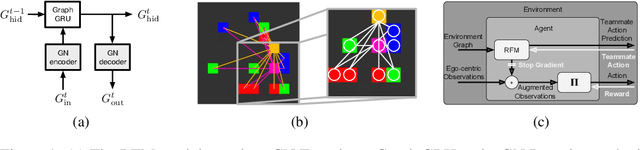
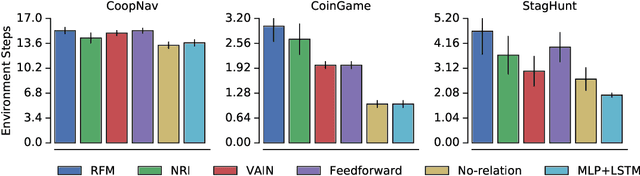
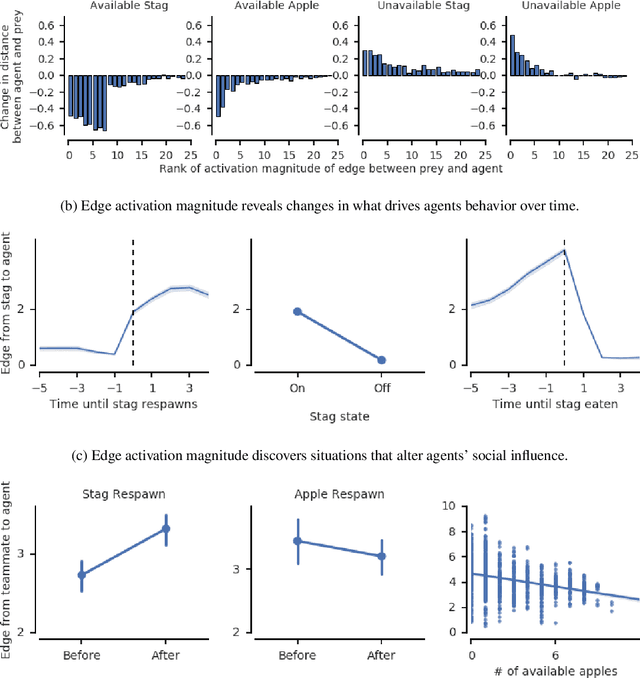
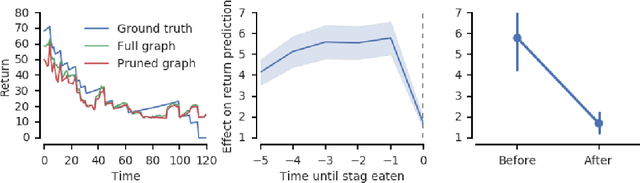
The behavioral dynamics of multi-agent systems have a rich and orderly structure, which can be leveraged to understand these systems, and to improve how artificial agents learn to operate in them. Here we introduce Relational Forward Models (RFM) for multi-agent learning, networks that can learn to make accurate predictions of agents' future behavior in multi-agent environments. Because these models operate on the discrete entities and relations present in the environment, they produce interpretable intermediate representations which offer insights into what drives agents' behavior, and what events mediate the intensity and valence of social interactions. Furthermore, we show that embedding RFM modules inside agents results in faster learning systems compared to non-augmented baselines. As more and more of the autonomous systems we develop and interact with become multi-agent in nature, developing richer analysis tools for characterizing how and why agents make decisions is increasingly necessary. Moreover, developing artificial agents that quickly and safely learn to coordinate with one another, and with humans in shared environments, is crucial.
Relational inductive bias for physical construction in humans and machines
Jun 04, 2018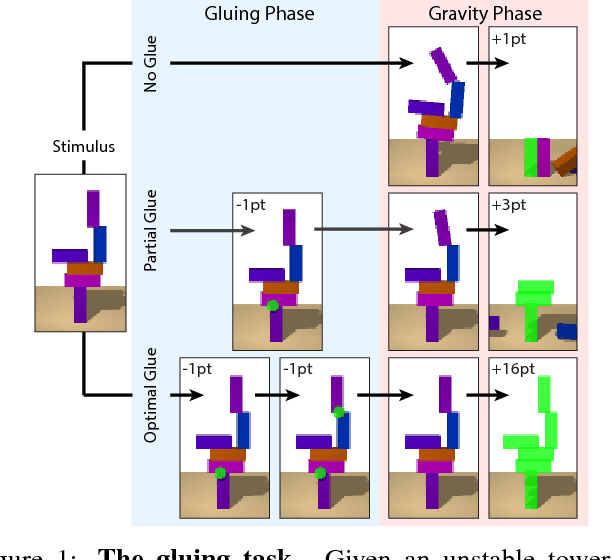
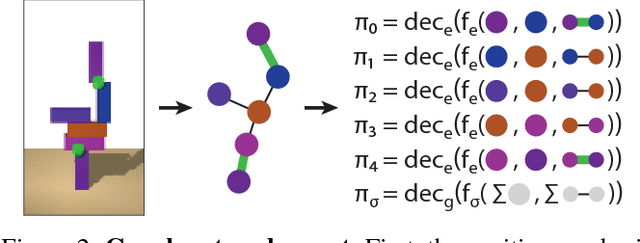
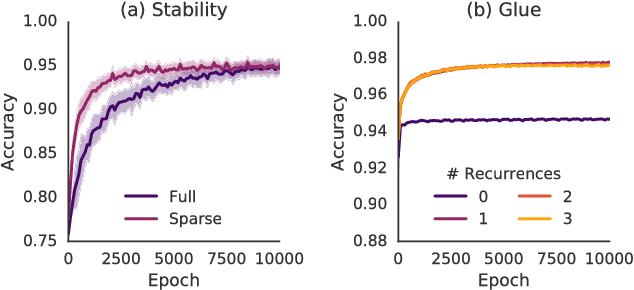
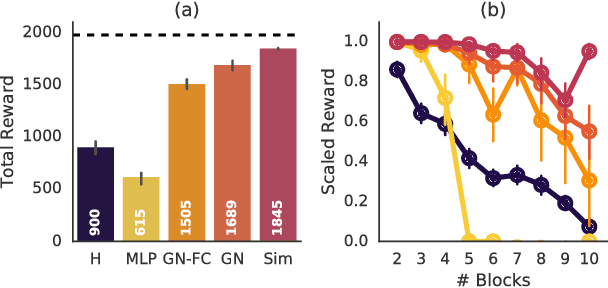
While current deep learning systems excel at tasks such as object classification, language processing, and gameplay, few can construct or modify a complex system such as a tower of blocks. We hypothesize that what these systems lack is a "relational inductive bias": a capacity for reasoning about inter-object relations and making choices over a structured description of a scene. To test this hypothesis, we focus on a task that involves gluing pairs of blocks together to stabilize a tower, and quantify how well humans perform. We then introduce a deep reinforcement learning agent which uses object- and relation-centric scene and policy representations and apply it to the task. Our results show that these structured representations allow the agent to outperform both humans and more naive approaches, suggesting that relational inductive bias is an important component in solving structured reasoning problems and for building more intelligent, flexible machines.
Metacontrol for Adaptive Imagination-Based Optimization
May 07, 2017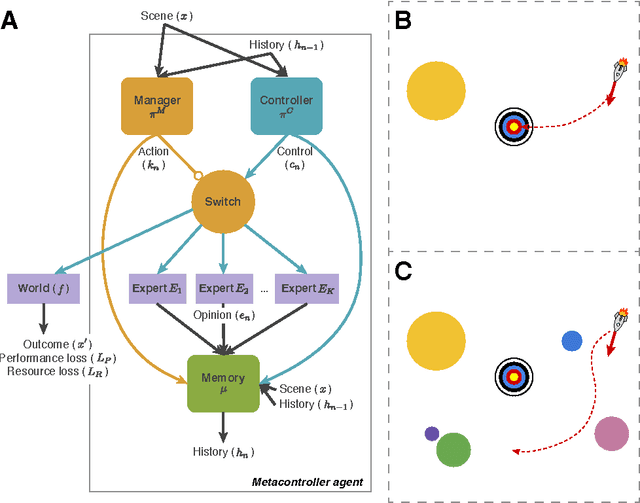
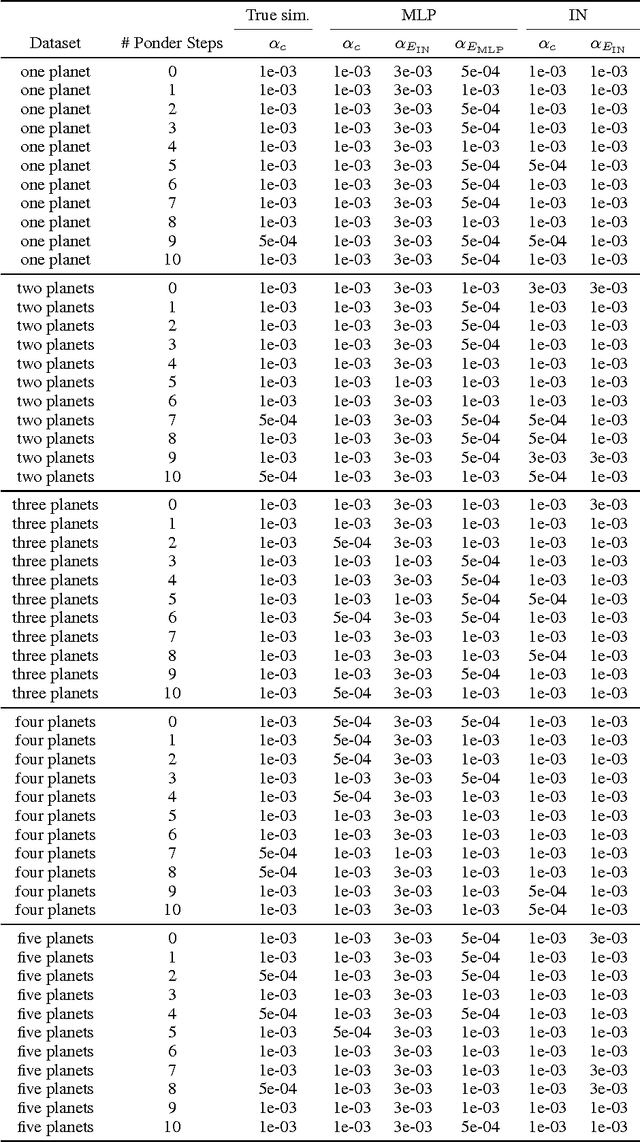
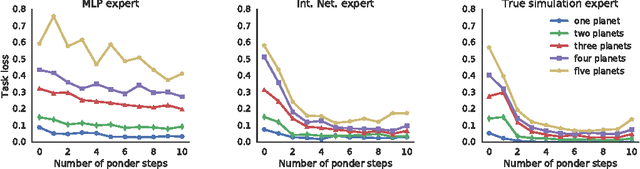
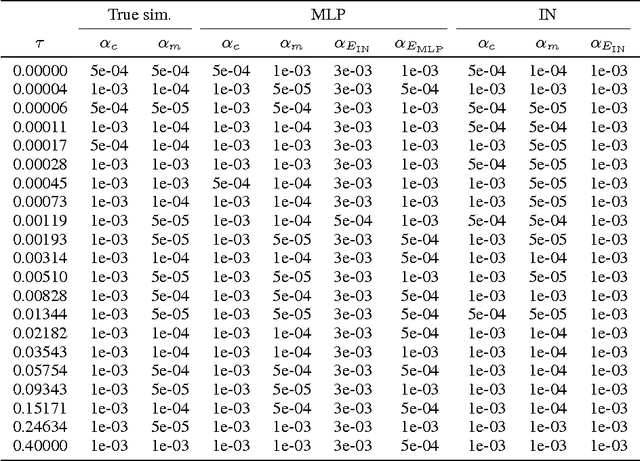
Many machine learning systems are built to solve the hardest examples of a particular task, which often makes them large and expensive to run---especially with respect to the easier examples, which might require much less computation. For an agent with a limited computational budget, this "one-size-fits-all" approach may result in the agent wasting valuable computation on easy examples, while not spending enough on hard examples. Rather than learning a single, fixed policy for solving all instances of a task, we introduce a metacontroller which learns to optimize a sequence of "imagined" internal simulations over predictive models of the world in order to construct a more informed, and more economical, solution. The metacontroller component is a model-free reinforcement learning agent, which decides both how many iterations of the optimization procedure to run, as well as which model to consult on each iteration. The models (which we call "experts") can be state transition models, action-value functions, or any other mechanism that provides information useful for solving the task, and can be learned on-policy or off-policy in parallel with the metacontroller. When the metacontroller, controller, and experts were trained with "interaction networks" (Battaglia et al., 2016) as expert models, our approach was able to solve a challenging decision-making problem under complex non-linear dynamics. The metacontroller learned to adapt the amount of computation it performed to the difficulty of the task, and learned how to choose which experts to consult by factoring in both their reliability and individual computational resource costs. This allowed the metacontroller to achieve a lower overall cost (task loss plus computational cost) than more traditional fixed policy approaches. These results demonstrate that our approach is a powerful framework for using...
Interaction Networks for Learning about Objects, Relations and Physics
Dec 01, 2016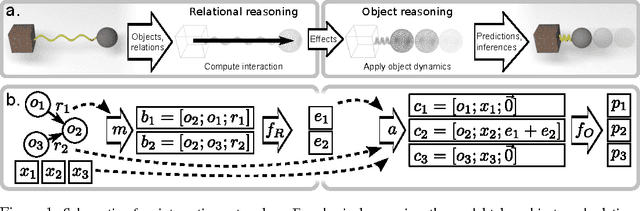
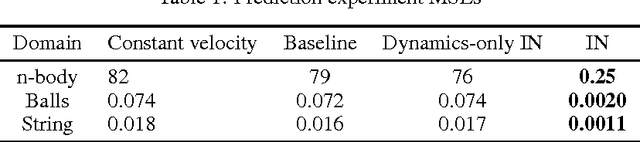
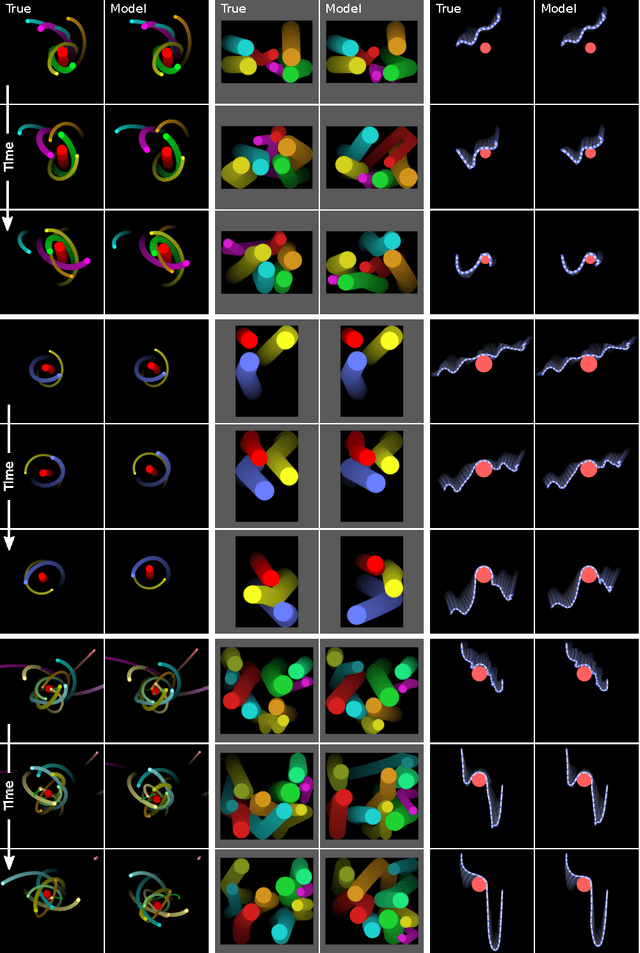
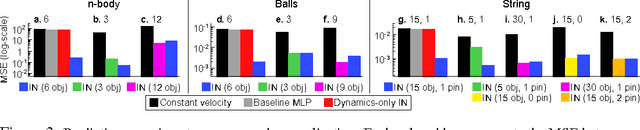
Reasoning about objects, relations, and physics is central to human intelligence, and a key goal of artificial intelligence. Here we introduce the interaction network, a model which can reason about how objects in complex systems interact, supporting dynamical predictions, as well as inferences about the abstract properties of the system. Our model takes graphs as input, performs object- and relation-centric reasoning in a way that is analogous to a simulation, and is implemented using deep neural networks. We evaluate its ability to reason about several challenging physical domains: n-body problems, rigid-body collision, and non-rigid dynamics. Our results show it can be trained to accurately simulate the physical trajectories of dozens of objects over thousands of time steps, estimate abstract quantities such as energy, and generalize automatically to systems with different numbers and configurations of objects and relations. Our interaction network implementation is the first general-purpose, learnable physics engine, and a powerful general framework for reasoning about object and relations in a wide variety of complex real-world domains.