 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlphaStar Unplugged: Large-Scale Offline Reinforcement Learning
Aug 07, 2023



StarCraft II is one of the most challenging simulated reinforcement learning environments; it is partially observable, stochastic, multi-agent, and mastering StarCraft II requires strategic planning over long time horizons with real-time low-level execution. It also has an active professional competitive scene. StarCraft II is uniquely suited for advancing offline RL algorithms, both because of its challenging nature and because Blizzard has released a massive dataset of millions of StarCraft II games played by human players. This paper leverages that and establishes a benchmark, called AlphaStar Unplugged, introducing unprecedented challenges for offline reinforcement learning. We define a dataset (a subset of Blizzard's release), tools standardizing an API for machine learning methods, and an evaluation protocol. We also present baseline agents, including behavior cloning, offline variants of actor-critic and MuZero. We improve the state of the art of agents using only offline data, and we achieve 90% win rate against previously published AlphaStar behavior cloning agent.
Waffling around for Performance: Visual Classification with Random Words and Broad Concepts
Jun 12, 2023



The visual classification performance of vision-language models such as CLIP can benefit from additional semantic knowledge, e.g. via large language models (LLMs) such as GPT-3. Further extending classnames with LLM-generated class descriptors, e.g. ``waffle, \textit{which has a round shape}'', or averaging retrieval scores over multiple such descriptors, has been shown to improve generalization performance. In this work, we study this behavior in detail and propose \texttt{Waffle}CLIP, a framework for zero-shot visual classification which achieves similar performance gains on a large number of visual classification tasks by simply replacing LLM-generated descriptors with random character and word descriptors \textbf{without} querying external models. We extend these results with an extensive experimental study on the impact and shortcomings of additional semantics introduced via LLM-generated descriptors, and showcase how semantic context is better leveraged by automatically querying LLMs for high-level concepts, while jointly resolving potential class name ambiguities. Link to the codebase: https://github.com/ExplainableML/WaffleCLIP.
Optimizing Memory Mapping Using Deep Reinforcement Learning
May 11, 2023



Resource scheduling and allocation is a critical component of many high impact systems ranging from congestion control to cloud computing. Finding more optimal solutions to these problems often has significant impact on resource and time savings, reducing device wear-and-tear, and even potentially improving carbon emissions. In this paper, we focus on a specific instance of a scheduling problem, namely the memory mapping problem that occurs during compilation of machine learning programs: That is, mapping tensors to different memory layers to optimize execution time. We introduce an approach for solving the memory mapping problem using Reinforcement Learning. RL is a solution paradigm well-suited for sequential decision making problems that are amenable to planning, and combinatorial search spaces with high-dimensional data inputs. We formulate the problem as a single-player game, which we call the mallocGame, such that high-reward trajectories of the game correspond to efficient memory mappings on the target hardware. We also introduce a Reinforcement Learning agent, mallocMuZero, and show that it is capable of playing this game to discover new and improved memory mapping solutions that lead to faster execution times on real ML workloads on ML accelerators. We compare the performance of mallocMuZero to the default solver used by the Accelerated Linear Algebra (XLA) compiler on a benchmark of realistic ML workloads. In addition, we show that mallocMuZero is capable of improving the execution time of the recently published AlphaTensor matrix multiplication model.
GraphCast: Learning skillful medium-range global weather forecasting
Dec 24, 2022



We introduce a machine-learning (ML)-based weather simulator--called "GraphCast"--which outperforms the most accurate deterministic operational medium-range weather forecasting system in the world, as well as all previous ML baselines. GraphCast is an autoregressive model, based on graph neural networks and a novel high-resolution multi-scale mesh representation, which we trained on historical weather data from the European Centre for Medium-Range Weather Forecasts (ECMWF)'s ERA5 reanalysis archive. It can make 10-day forecasts, at 6-hour time intervals, of five surface variables and six atmospheric variables, each at 37 vertical pressure levels, on a 0.25-degree latitude-longitude grid, which corresponds to roughly 25 x 25 kilometer resolution at the equator. Our results show GraphCast is more accurate than ECMWF's deterministic operational forecasting system, HRES, on 90.0% of the 2760 variable and lead time combinations we evaluated. GraphCast also outperforms the most accurate previous ML-based weather forecasting model on 99.2% of the 252 targets it reported. GraphCast can generate a 10-day forecast (35 gigabytes of data) in under 60 seconds on Cloud TPU v4 hardware. Unlike traditional forecasting methods, ML-based forecasting scales well with data: by training on bigger, higher quality, and more recent data, the skill of the forecasts can improve. Together these results represent a key step forward in complementing and improving weather modeling with ML, open new opportunities for fast, accurate forecasting, and help realize the promise of ML-based simulation in the physical sciences.
Emergent Abilities of Large Language Models
Jun 15, 2022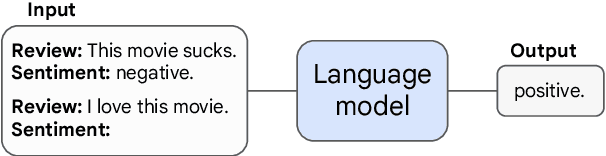
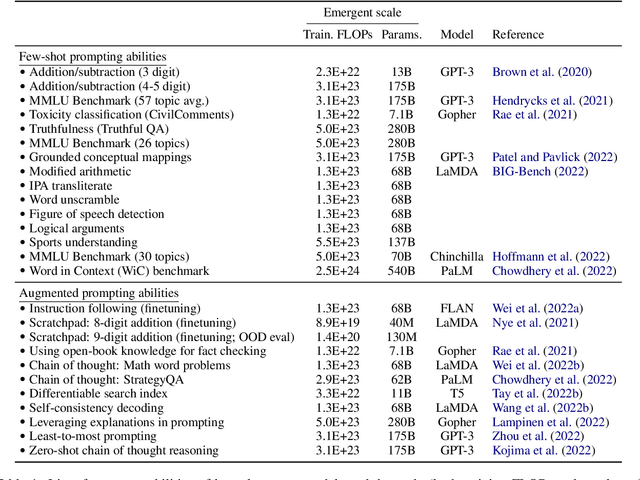
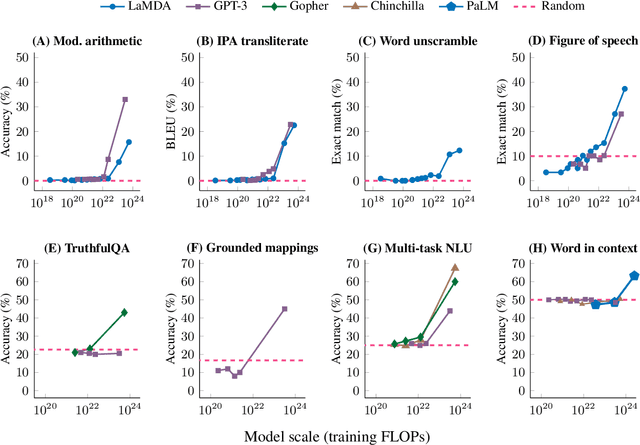
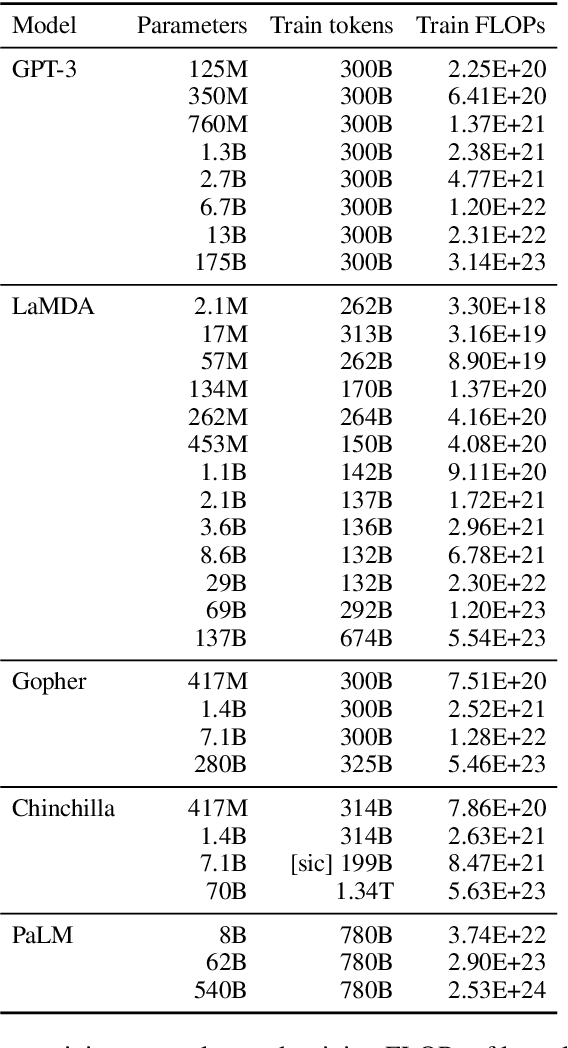
Scaling up language models has been shown to predictably improve performance and sample efficiency on a wide range of downstream tasks. This paper instead discusses an unpredictable phenomenon that we refer to as emergent abilities of large language models. We consider an ability to be emergent if it is not present in smaller models but is present in larger models. Thus, emergent abilities cannot be predicted simply by extrapolating the performance of smaller models. The existence of such emergence implies that additional scaling could further expand the range of capabilities of language models.
A Generalist Agent
May 19, 2022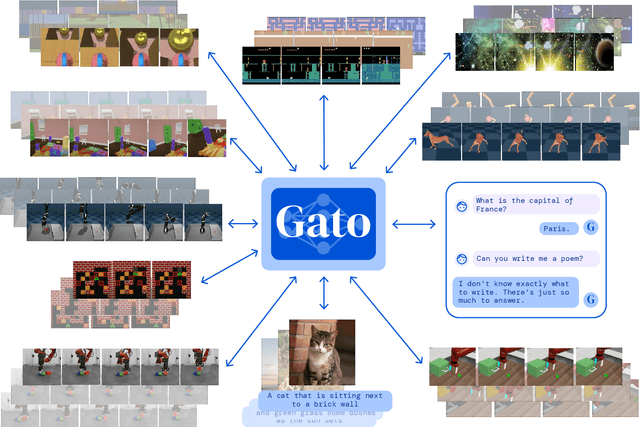
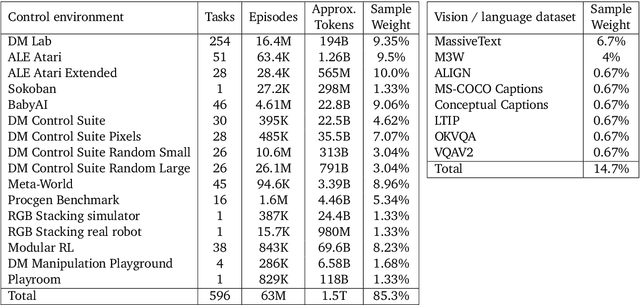
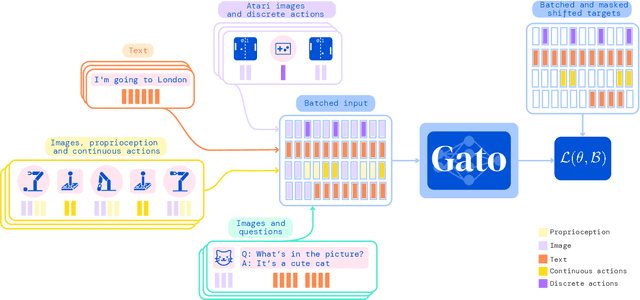

Inspired by progress in large-scale language modeling, we apply a similar approach towards building a single generalist agent beyond the realm of text outputs. The agent, which we refer to as Gato, works as a multi-modal, multi-task, multi-embodiment generalist policy. The same network with the same weights can play Atari, caption images, chat, stack blocks with a real robot arm and much more, deciding based on its context whether to output text, joint torques, button presses, or other tokens. In this report we describe the model and the data, and document the current capabilities of Gato.
Flamingo: a Visual Language Model for Few-Shot Learning
Apr 29, 2022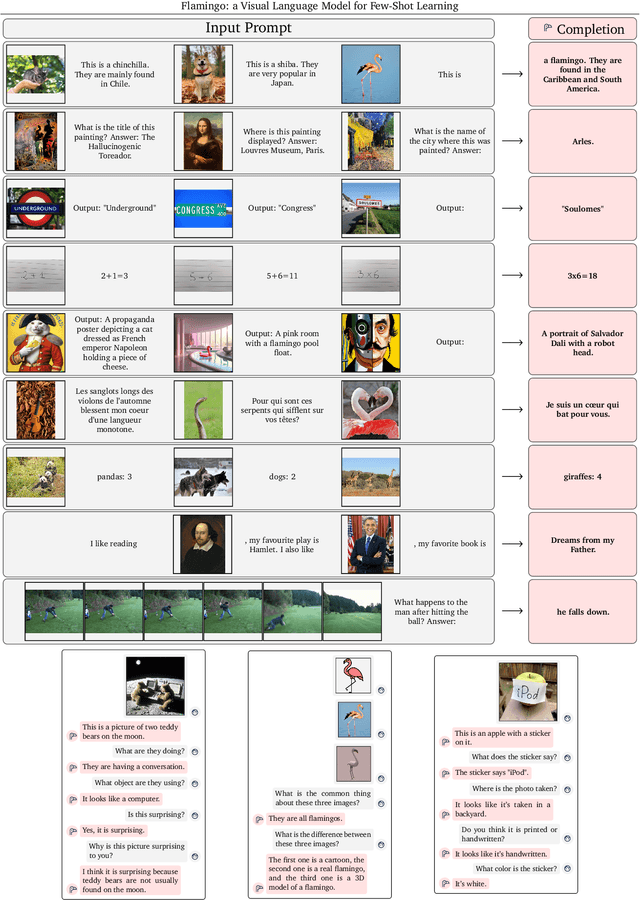
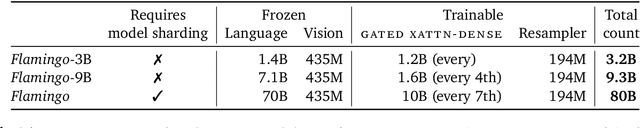
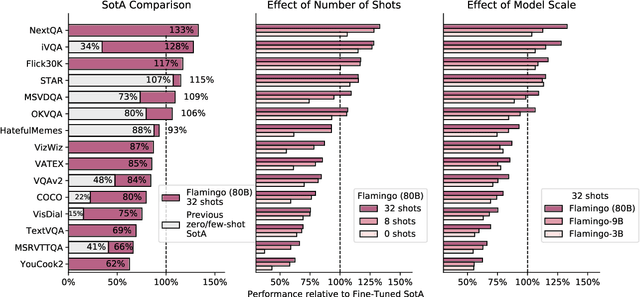
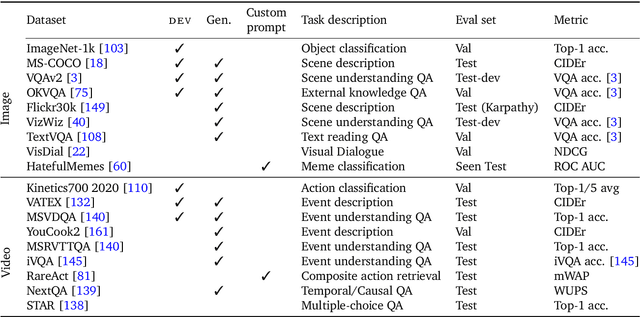
Building models that can be rapidly adapted to numerous tasks using only a handful of annotated examples is an open challenge for multimodal machine learning research. We introduce Flamingo, a family of Visual Language Models (VLM) with this ability. Flamingo models include key architectural innovations to: (i) bridge powerful pretrained vision-only and language-only models, (ii) handle sequences of arbitrarily interleaved visual and textual data, and (iii) seamlessly ingest images or videos as inputs. Thanks to their flexibility, Flamingo models can be trained on large-scale multimodal web corpora containing arbitrarily interleaved text and images, which is key to endow them with in-context few-shot learning capabilities. We perform a thorough evaluation of the proposed Flamingo models, exploring and measuring their ability to rapidly adapt to a variety of image and video understanding benchmarks. These include open-ended tasks such as visual question-answering, where the model is prompted with a question which it has to answer, captioning tasks, which evaluate the ability to describe a scene or an event, and close-ended tasks such as multiple choice visual question-answering. For tasks lying anywhere on this spectrum, we demonstrate that a single Flamingo model can achieve a new state of the art for few-shot learning, simply by prompting the model with task-specific examples. On many of these benchmarks, Flamingo actually surpasses the performance of models that are fine-tuned on thousands of times more task-specific data.
Training Compute-Optimal Large Language Models
Mar 29, 2022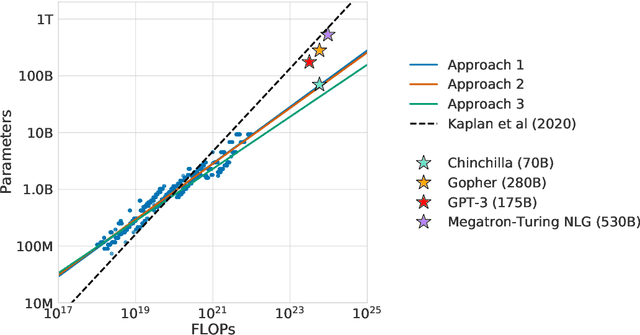
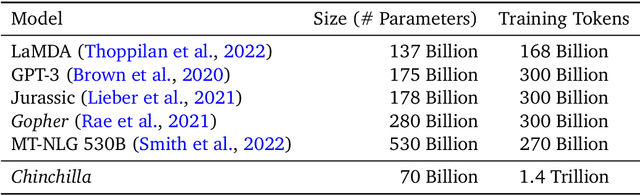
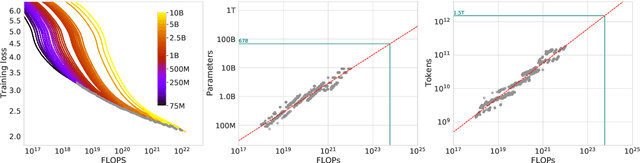
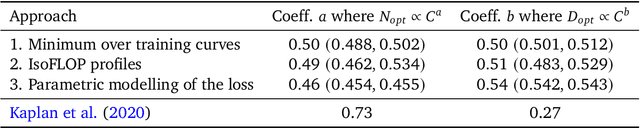
We investigate the optimal model size and number of tokens for training a transformer language model under a given compute budget. We find that current large language models are significantly undertrained, a consequence of the recent focus on scaling language models whilst keeping the amount of training data constant. By training over \nummodels language models ranging from 70 million to over 16 billion parameters on 5 to 500 billion tokens, we find that for compute-optimal training, the model size and the number of training tokens should be scaled equally: for every doubling of model size the number of training tokens should also be doubled. We test this hypothesis by training a predicted compute-optimal model, \chinchilla, that uses the same compute budget as \gopher but with 70B parameters and 4$\times$ more more data. \chinchilla uniformly and significantly outperforms \Gopher (280B), GPT-3 (175B), Jurassic-1 (178B), and Megatron-Turing NLG (530B) on a large range of downstream evaluation tasks. This also means that \chinchilla uses substantially less compute for fine-tuning and inference, greatly facilitating downstream usage. As a highlight, \chinchilla reaches a state-of-the-art average accuracy of 67.5\% on the MMLU benchmark, greater than a 7\% improvement over \gopher.
Non-isotropy Regularization for Proxy-based Deep Metric Learning
Mar 16, 2022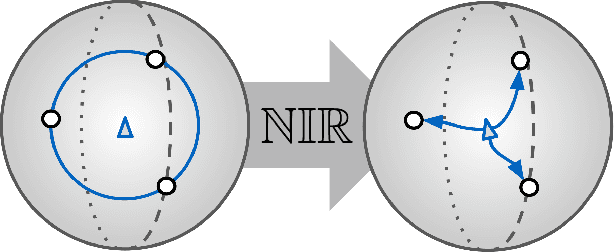
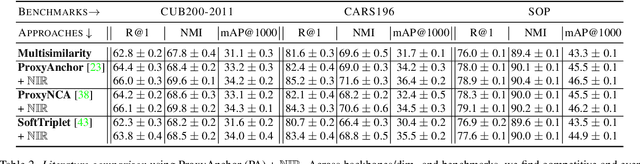
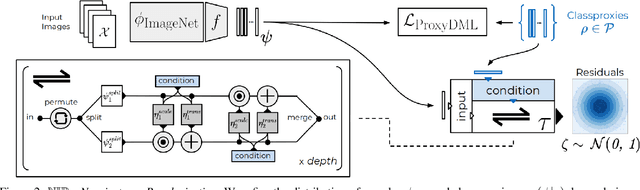
Deep Metric Learning (DML) aims to learn representation spaces on which semantic relations can simply be expressed through predefined distance metrics. Best performing approaches commonly leverage class proxies as sample stand-ins for better convergence and generalization. However, these proxy-methods solely optimize for sample-proxy distances. Given the inherent non-bijectiveness of used distance functions, this can induce locally isotropic sample distributions, leading to crucial semantic context being missed due to difficulties resolving local structures and intraclass relations between samples. To alleviate this problem, we propose non-isotropy regularization ($\mathbb{NIR}$) for proxy-based Deep Metric Learning. By leveraging Normalizing Flows, we enforce unique translatability of samples from their respective class proxies. This allows us to explicitly induce a non-isotropic distribution of samples around a proxy to optimize for. In doing so, we equip proxy-based objectives to better learn local structures. Extensive experiments highlight consistent generalization benefits of $\mathbb{NIR}$ while achieving competitive and state-of-the-art performance on the standard benchmarks CUB200-2011, Cars196 and Stanford Online Products. In addition, we find the superior convergence properties of proxy-based methods to still be retained or even improved, making $\mathbb{NIR}$ very attractive for practical usage. Code available at https://github.com/ExplainableML/NonIsotropicProxyDML.
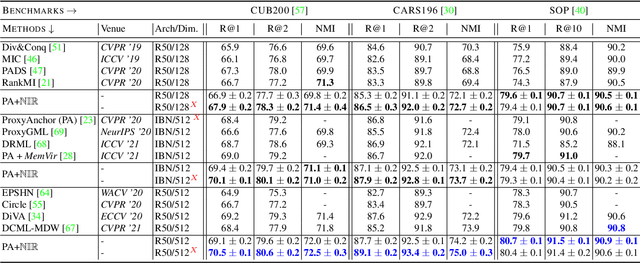
Integrating Language Guidance into Vision-based Deep Metric Learning
Mar 16, 2022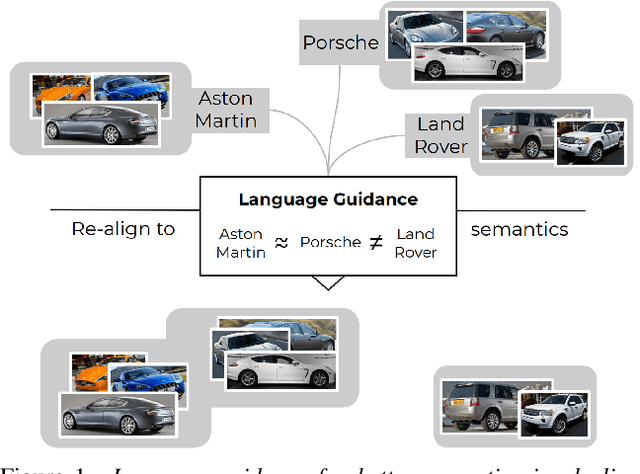
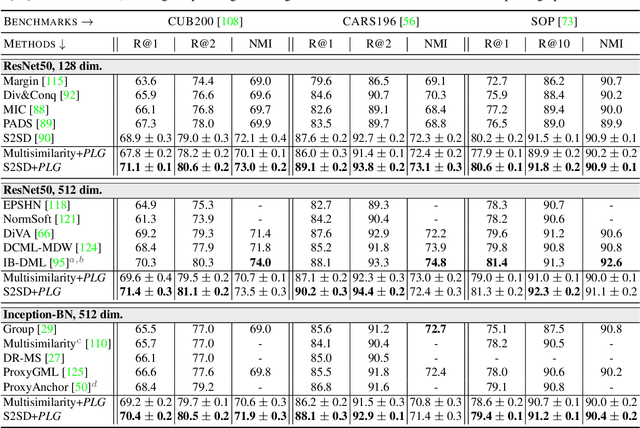
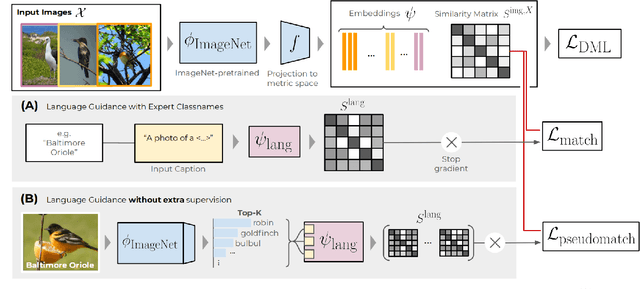
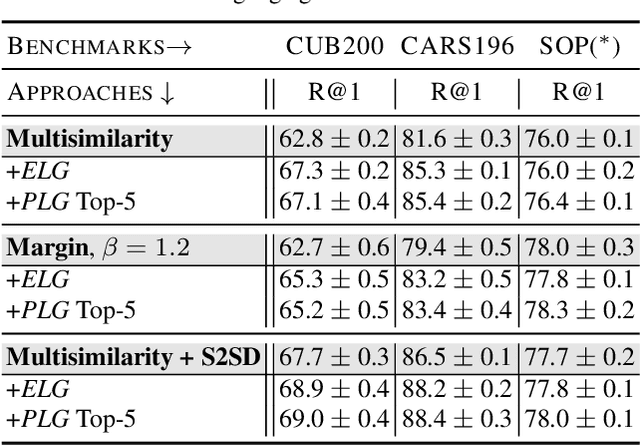
Deep Metric Learning (DML) proposes to learn metric spaces which encode semantic similarities as embedding space distances. These spaces should be transferable to classes beyond those seen during training. Commonly, DML methods task networks to solve contrastive ranking tasks defined over binary class assignments. However, such approaches ignore higher-level semantic relations between the actual classes. This causes learned embedding spaces to encode incomplete semantic context and misrepresent the semantic relation between classes, impacting the generalizability of the learned metric space. To tackle this issue, we propose a language guidance objective for visual similarity learning. Leveraging language embeddings of expert- and pseudo-classnames, we contextualize and realign visual representation spaces corresponding to meaningful language semantics for better semantic consistency. Extensive experiments and ablations provide a strong motivation for our proposed approach and show language guidance offering significant, model-agnostic improvements for DML, achieving competitive and state-of-the-art results on all benchmarks. Code available at https://github.com/ExplainableML/LanguageGuidance_for_DML.