 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrthoTrack: Continuous 6-DoF UAV Trajectory Estimation Anchored in Public Orthophotos
Jun 24, 2026Continuous 6-DoF pose estimation is essential for autonomous UAV operations. Yet, existing visual odometry and SLAM methods accumulate drift and yield only relative, up-to-scale trajectories. Single-frame geo-localization, in turn, discards temporal continuity and remains too slow for real-time use. We present OrthoTrack, a training-free system that estimates continuous 6-DoF UAV trajectories using only publicly available orthophotos and surface models as a map prior. OrthoTrack matches keyframes against the orthophoto and lifts correspondences to metric 3D via the surface model. It then propagates these map-anchored correspondences to intermediate frames with optical flow, producing absolute, metrically scaled poses at every frame without GPS or post-hoc alignment. We also introduce the MovingDrone Dataset, a large-scale benchmark pairing photorealistic UAV sequences with dense 6-DoF ground truth and co-registered multi-modal geodata including multi-temporal orthophotos. On MovingDrone and real-world benchmarks, OrthoTrack runs in real time on a single GPU. It outperforms all baselines by a large margin, even those receiving oracle scale and alignment. By relying on publicly available geodata, OrthoTrack enables deployment to new regions without site-specific adaptation.
ConFixGS: Learning to Fix Feedforward 3D Gaussian Splatting with Confidence-Aware Diffusion Priors in Driving Scenes
May 10, 2026Feedforward 3D Gaussian Splatting (3DGS) often struggles in trajectory-based sparse-view driving scenes. Existing Gaussian repair methods mainly target optimization-based 3DGS, while diffusion-based repair is typically restricted to iterative refinement near observed viewpoints, leaving feedforward 3DGS repair underexplored. We propose ConFixGS, a plug-and-play method that learns to fix feedforward 3DGS with confidence-aware diffusion priors. Starting from a pretrained feedforward model, ConFixGS generates diffusion-enhanced local pseudo-targets and validates them through reprojection-based cross-checking against support views. The resulting dense confidence maps guide refinement, enhancing reliable details while suppressing hallucinated or inconsistent evidence. On Waymo, nuScenes, and KITTI, ConFixGS improves challenging novel view synthesis, with PSNR gains of up to 3.68 dB and FID reduced by nearly half. Our results highlight confidence-aware fusion of generative priors and support-view consistency as a key principle for robust feedforward 3D driving scene reconstruction.
GS4City: Hierarchical Semantic Gaussian Splatting via City-Model Priors
Apr 13, 2026Recent semantic 3D Gaussian Splatting (3DGS) methods primarily rely on 2D foundation models, often yielding ambiguous boundaries and limited support for structured urban semantics. While city models such as CityGML encode hierarchically organized semantics together with building geometry, these labels cannot be directly mapped to Gaussian primitives. We present GS4City, a hierarchical semantic Gaussian Splatting method that incorporates city-model priors for urban scene understanding. GS4City derives reliable image-aligned masks from Level of Detail (LoD) 3 CityGML models via two-pass raycasting, explicitly using parent-child relations to validate and recover fine-grained facade elements. It then fuses these geometry-grounded masks with foundation-model predictions to establish scene-consistent instance correspondences, and learns a compact identity encoding for each Gaussian under joint 2D identity supervision and 3D spatial regularization. Experiments on the TUM2TWIN and Gold Coast datasets show that GS4City effectively incorporates structured building semantics into Gaussian scene representations, outperforming existing 2D-driven semantic 3DGS baselines, including LangSplat and Gaga, by up to 15.8 IoU points in coarse building segmentation and 14.2 mIoU points in fine-grained semantic segmentation. By bridging structured city models and photorealistic Gaussian scene representations, GS4City enables semantically queryable and structure-aware urban reconstruction. Code is available at https://github.com/Jinyzzz/GS4City.
TOL: Textual Localization with OpenStreetMap
Apr 02, 2026Natural language provides an intuitive way to express spatial intent in geospatial applications. While existing localization methods often rely on dense point cloud maps or high-resolution imagery, OpenStreetMap (OSM) offers a compact and freely available map representation that encodes rich semantic and structural information, making it well suited for large-scale localization. However, text-to-OSM (T2O) localization remains largely unexplored. In this paper, we formulate the T2O global localization task, which aims to estimate accurate 2 degree-of-freedom (DoF) positions in urban environments from textual scene descriptions without relying on geometric observations or GNSS-based initial location. To support the proposed task, we introduce TOL, a large-scale benchmark spanning multiple continents and diverse urban environments. TOL contains approximately 121K textual queries paired with OSM map tiles and covers about 316 km of road trajectories across Boston, Karlsruhe, and Singapore. We further propose TOLoc, a coarse-to-fine localization framework that explicitly models the semantics of surrounding objects and their directional information. In the coarse stage, direction-aware features are extracted from both textual descriptions and OSM tiles to construct global descriptors, which are used to retrieve candidate locations for the query. In the fine stage, the query text and top-1 retrieved tile are jointly processed, where a dedicated alignment module fuses textual descriptor and local map features to regress the 2-DoF pose. Experimental results demonstrate that TOLoc achieves strong localization performance, outperforming the best existing method by 6.53%, 9.93%, and 8.31% at 5m, 10m, and 25m thresholds, respectively, and shows strong generalization to unseen environments. Dataset, code and models will be publicly available at: https://github.com/WHU-USI3DV/TOL.
ActionReasoning: Robot Action Reasoning in 3D Space with LLM for Robotic Brick Stacking
Feb 24, 2026Classical robotic systems typically rely on custom planners designed for constrained environments. While effective in restricted settings, these systems lack generalization capabilities, limiting the scalability of embodied AI and general-purpose robots. Recent data-driven Vision-Language-Action (VLA) approaches aim to learn policies from large-scale simulation and real-world data. However, the continuous action space of the physical world significantly exceeds the representational capacity of linguistic tokens, making it unclear if scaling data alone can yield general robotic intelligence. To address this gap, we propose ActionReasoning, an LLM-driven framework that performs explicit action reasoning to produce physics-consistent, prior-guided decisions for robotic manipulation. ActionReasoning leverages the physical priors and real-world knowledge already encoded in Large Language Models (LLMs) and structures them within a multi-agent architecture. We instantiate this framework on a tractable case study of brick stacking, where the environment states are assumed to be already accurately measured. The environmental states are then serialized and passed to a multi-agent LLM framework that generates physics-aware action plans. The experiments demonstrate that the proposed multi-agent LLM framework enables stable brick placement while shifting effort from low-level domain-specific coding to high-level tool invocation and prompting, highlighting its potential for broader generalization. This work introduces a promising approach to bridging perception and execution in robotic manipulation by integrating physical reasoning with LLMs.
TrueCity: Real and Simulated Urban Data for Cross-Domain 3D Scene Understanding
Nov 10, 2025



3D semantic scene understanding remains a long-standing challenge in the 3D computer vision community. One of the key issues pertains to limited real-world annotated data to facilitate generalizable models. The common practice to tackle this issue is to simulate new data. Although synthetic datasets offer scalability and perfect labels, their designer-crafted scenes fail to capture real-world complexity and sensor noise, resulting in a synthetic-to-real domain gap. Moreover, no benchmark provides synchronized real and simulated point clouds for segmentation-oriented domain shift analysis. We introduce TrueCity, the first urban semantic segmentation benchmark with cm-accurate annotated real-world point clouds, semantic 3D city models, and annotated simulated point clouds representing the same city. TrueCity proposes segmentation classes aligned with international 3D city modeling standards, enabling consistent evaluation of synthetic-to-real gap. Our extensive experiments on common baselines quantify domain shift and highlight strategies for exploiting synthetic data to enhance real-world 3D scene understanding. We are convinced that the TrueCity dataset will foster further development of sim-to-real gap quantification and enable generalizable data-driven models. The data, code, and 3D models are available online: https://tum-gis.github.io/TrueCity/
InfraDiffusion: zero-shot depth map restoration with diffusion models and prompted segmentation from sparse infrastructure point clouds
Sep 03, 2025



Point clouds are widely used for infrastructure monitoring by providing geometric information, where segmentation is required for downstream tasks such as defect detection. Existing research has automated semantic segmentation of structural components, while brick-level segmentation (identifying defects such as spalling and mortar loss) has been primarily conducted from RGB images. However, acquiring high-resolution images is impractical in low-light environments like masonry tunnels. Point clouds, though robust to dim lighting, are typically unstructured, sparse, and noisy, limiting fine-grained segmentation. We present InfraDiffusion, a zero-shot framework that projects masonry point clouds into depth maps using virtual cameras and restores them by adapting the Denoising Diffusion Null-space Model (DDNM). Without task-specific training, InfraDiffusion enhances visual clarity and geometric consistency of depth maps. Experiments on masonry bridge and tunnel point cloud datasets show significant improvements in brick-level segmentation using the Segment Anything Model (SAM), underscoring its potential for automated inspection of masonry assets. Our code and data is available at https://github.com/Jingyixiong/InfraDiffusion-official-implement.
GS4Buildings: Prior-Guided Gaussian Splatting for 3D Building Reconstruction
Aug 10, 2025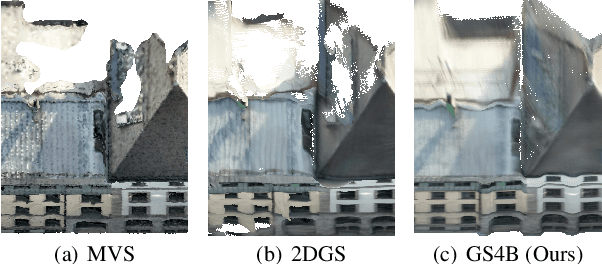
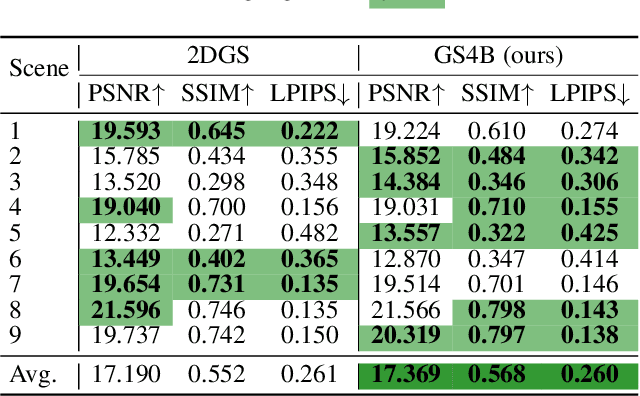
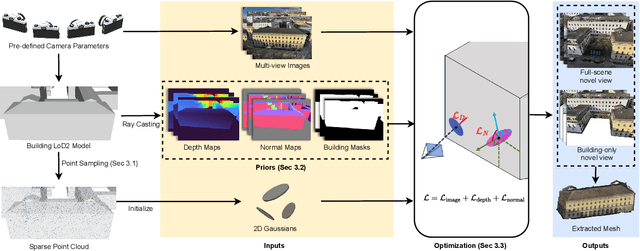

Recent advances in Gaussian Splatting (GS) have demonstrated its effectiveness in photo-realistic rendering and 3D reconstruction. Among these, 2D Gaussian Splatting (2DGS) is particularly suitable for surface reconstruction due to its flattened Gaussian representation and integrated normal regularization. However, its performance often degrades in large-scale and complex urban scenes with frequent occlusions, leading to incomplete building reconstructions. We propose GS4Buildings, a novel prior-guided Gaussian Splatting method leveraging the ubiquity of semantic 3D building models for robust and scalable building surface reconstruction. Instead of relying on traditional Structure-from-Motion (SfM) pipelines, GS4Buildings initializes Gaussians directly from low-level Level of Detail (LoD)2 semantic 3D building models. Moreover, we generate prior depth and normal maps from the planar building geometry and incorporate them into the optimization process, providing strong geometric guidance for surface consistency and structural accuracy. We also introduce an optional building-focused mode that limits reconstruction to building regions, achieving a 71.8% reduction in Gaussian primitives and enabling a more efficient and compact representation. Experiments on urban datasets demonstrate that GS4Buildings improves reconstruction completeness by 20.5% and geometric accuracy by 32.8%. These results highlight the potential of semantic building model integration to advance GS-based reconstruction toward real-world urban applications such as smart cities and digital twins. Our project is available: https://github.com/zqlin0521/GS4Buildings.
To Glue or Not to Glue? Classical vs Learned Image Matching for Mobile Mapping Cameras to Textured Semantic 3D Building Models
May 23, 2025



Feature matching is a necessary step for many computer vision and photogrammetry applications such as image registration, structure-from-motion, and visual localization. Classical handcrafted methods such as SIFT feature detection and description combined with nearest neighbour matching and RANSAC outlier removal have been state-of-the-art for mobile mapping cameras. With recent advances in deep learning, learnable methods have been introduced and proven to have better robustness and performance under complex conditions. Despite their growing adoption, a comprehensive comparison between classical and learnable feature matching methods for the specific task of semantic 3D building camera-to-model matching is still missing. This submission systematically evaluates the effectiveness of different feature-matching techniques in visual localization using textured CityGML LoD2 models. We use standard benchmark datasets (HPatches, MegaDepth-1500) and custom datasets consisting of facade textures and corresponding camera images (terrestrial and drone). For the latter, we evaluate the achievable accuracy of the absolute pose estimated using a Perspective-n-Point (PnP) algorithm, with geometric ground truth derived from geo-referenced trajectory data. The results indicate that the learnable feature matching methods vastly outperform traditional approaches regarding accuracy and robustness on our challenging custom datasets with zero to 12 RANSAC-inliers and zero to 0.16 area under the curve. We believe that this work will foster the development of model-based visual localization methods. Link to the code: https://github.com/simBauer/To\_Glue\_or\_not\_to\_Glue
Mind the Domain Gap: Measuring the Domain Gap Between Real-World and Synthetic Point Clouds for Automated Driving Development
May 23, 2025



Owing to the typical long-tail data distribution issues, simulating domain-gap-free synthetic data is crucial in robotics, photogrammetry, and computer vision research. The fundamental challenge pertains to credibly measuring the difference between real and simulated data. Such a measure is vital for safety-critical applications, such as automated driving, where out-of-domain samples may impact a car's perception and cause fatal accidents. Previous work has commonly focused on simulating data on one scene and analyzing performance on a different, real-world scene, hampering the disjoint analysis of domain gap coming from networks' deficiencies, class definitions, and object representation. In this paper, we propose a novel approach to measuring the domain gap between the real world sensor observations and simulated data representing the same location, enabling comprehensive domain gap analysis. To measure such a domain gap, we introduce a novel metric DoGSS-PCL and evaluation assessing the geometric and semantic quality of the simulated point cloud. Our experiments corroborate that the introduced approach can be used to measure the domain gap. The tests also reveal that synthetic semantic point clouds may be used for training deep neural networks, maintaining the performance at the 50/50 real-to-synthetic ratio. We strongly believe that this work will facilitate research on credible data simulation and allow for at-scale deployment in automated driving testing and digital twinning.