 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn agentic framework for gravitational-wave counterpart association in the multi-messenger era
May 11, 2026With the detection of gravitational waves (GWs), multi-messenger astronomy has opened a new window for advancing our understanding of astrophysics, dense matter, gravitation, and cosmology. The GW sources detected to date are from mergers of compact object binaries, which possess the potential to generate detectable electromagnetic (EM) counterparts. Searching for associations between GW signals and their EM counterparts is an essential step toward enabling subsequent multi-messenger studies. In the era of next-generation GW and EM detectors, the rapid increase in the number of events brings not only unprecedented scientific opportunities, but also substantial challenges to the existing data analysis paradigm. To help address these challenges, we develop GW-Eyes, an agentic framework powered by large language models (LLMs). For the first time, GW-Eyes integrates domain-specific tools and autonomously performs counterpart association tasks between GW and candidate EM events. It supports natural language interaction to assist human experts with auxiliary tasks such as catalog management, skymap visualization, and rapid verification. Our framework leverages the complex decision-making capabilities of LLMs and their traceable reasoning processes, offering a new perspective to the multi-messenger astronomy.
Probing RLVR training instability through the lens of objective-level hacking
Feb 01, 2026Prolonged reinforcement learning with verifiable rewards (RLVR) has been shown to drive continuous improvements in the reasoning capabilities of large language models, but the training is often prone to instabilities, especially in Mixture-of-Experts (MoE) architectures. Training instability severely undermines model capability improvement, yet its underlying causes and mechanisms remain poorly understood. In this work, we introduce a principled framework for understanding RLVR instability through the lens of objective-level hacking. Unlike reward hacking, which arises from exploitable verifiers, objective-level hacking emerges from token-level credit misalignment and is manifested as system-level spurious signals in the optimization objective. Grounded in our framework, together with extensive experiments on a 30B MoE model, we trace the origin and formalize the mechanism behind a key pathological training dynamic in MoE models: the abnormal growth of the training-inference discrepancy, a phenomenon widely associated with instability but previously lacking a mechanistic explanation. These findings provide a concrete and causal account of the training dynamics underlying instabilities in MoE models, offering guidance for the design of stable RLVR algorithms.
Mind the Domain Gap: Measuring the Domain Gap Between Real-World and Synthetic Point Clouds for Automated Driving Development
May 23, 2025



Owing to the typical long-tail data distribution issues, simulating domain-gap-free synthetic data is crucial in robotics, photogrammetry, and computer vision research. The fundamental challenge pertains to credibly measuring the difference between real and simulated data. Such a measure is vital for safety-critical applications, such as automated driving, where out-of-domain samples may impact a car's perception and cause fatal accidents. Previous work has commonly focused on simulating data on one scene and analyzing performance on a different, real-world scene, hampering the disjoint analysis of domain gap coming from networks' deficiencies, class definitions, and object representation. In this paper, we propose a novel approach to measuring the domain gap between the real world sensor observations and simulated data representing the same location, enabling comprehensive domain gap analysis. To measure such a domain gap, we introduce a novel metric DoGSS-PCL and evaluation assessing the geometric and semantic quality of the simulated point cloud. Our experiments corroborate that the introduced approach can be used to measure the domain gap. The tests also reveal that synthetic semantic point clouds may be used for training deep neural networks, maintaining the performance at the 50/50 real-to-synthetic ratio. We strongly believe that this work will facilitate research on credible data simulation and allow for at-scale deployment in automated driving testing and digital twinning.
Mitigating Hidden Confounding Effects for Causal Recommendation
May 16, 2022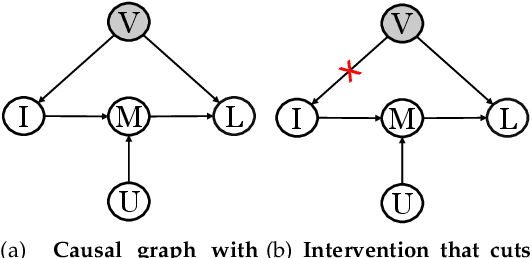
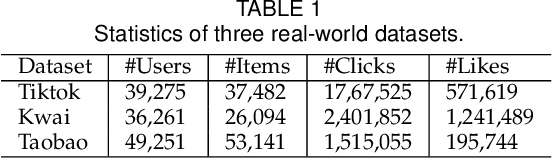
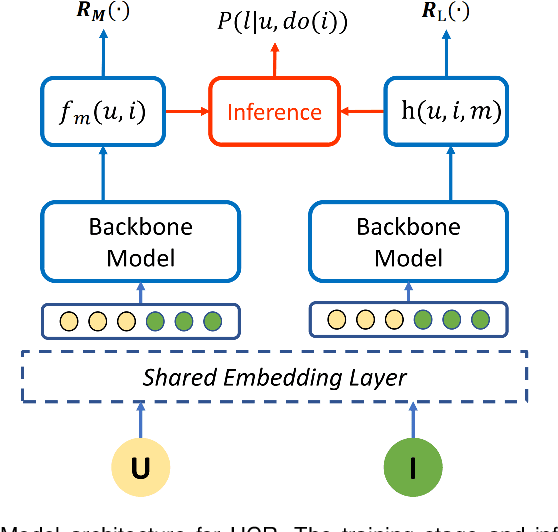
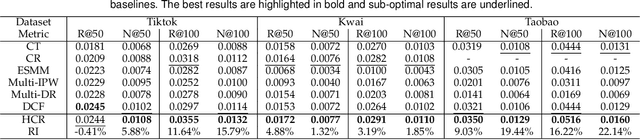
Recommender systems suffer from confounding biases when there exist confounders affecting both item features and user feedback (e.g., like or not). Existing causal recommendation methods typically assume confounders are fully observed and measured, forgoing the possible existence of hidden confounders in real applications. For instance, product quality is a confounder since affecting both item prices and user ratings, but is hidden for the third-party e-commerce platform due to the difficulty of large-scale quality inspection; ignoring it could result in the bias effect of over-recommending high-price items. This work analyzes and addresses the problem from a causal perspective. The key lies in modeling the causal effect of item features on a user's feedback. To mitigate hidden confounding effects, it is compulsory but challenging to estimate the causal effect without measuring the confounder. Towards this goal, we propose a Hidden Confounder Removal (HCR) framework that leverages front-door adjustment to decompose the causal effect into two partial effects, according to the mediators between item features and user feedback. The partial effects are independent from the hidden confounder and identifiable. During training, HCR performs multi-task learning to infer the partial effects from historical interactions. We instantiate HCR for two scenarios and conduct experiments on three real-world datasets. Empirical results show that the HCR framework provides more accurate recommendations, especially for less-active users. We will release the code once accepted.