 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantic-Geometric Dual Compression: Training-Free Visual Token Reduction for Ultra-High-Resolution Remote Sensing Understanding
Apr 13, 2026Multimodal Large Language Models (MLLMs) have demonstrated immense potential in Earth observation. However, the massive visual tokens generated when processing Ultra-High-Resolution (UHR) imagery introduce prohibitive computational overhead, severely bottlenecking their inference efficiency. Existing visual token compression methods predominantly adopt static and uniform compression strategies, neglecting the inherent "Semantic-Geometric Duality" in remote sensing interpretation tasks. Specifically, object semantic tasks focus on the abstract semantics of objects and benefit from aggressive background pruning, whereas scene geometric tasks critically rely on the integrity of spatial topology. To address this challenge, we propose DualComp, a task-adaptive dual-stream token compression framework. Dynamically guided by a lightweight pre-trained router, DualComp decouples feature processing into two dedicated pathways. In the object semantic stream, the Spatially-Contiguous Semantic Aggregator (SCSA) utilizes size-adaptive clustering to aggregates redundant background while protecting small object. In the scene geometric stream, the Instruction-Guided Structure Recoverer (IGSR) introduces a greedy path-tracing topology completion mechanism to reconstruct spatial skeletons. Experiments on the UHR remote sensing benchmark XLRS-Bench demonstrate that DualComp accomplishes high-fidelity remote sensing interpretation at an exceptionally low computational cost, achieving simultaneous improvements in both efficiency and accuracy.
GeoEyes: On-Demand Visual Focusing for Evidence-Grounded Understanding of Ultra-High-Resolution Remote Sensing Imagery
Feb 15, 2026The "thinking-with-images" paradigm enables multimodal large language models (MLLMs) to actively explore visual scenes via zoom-in tools. This is essential for ultra-high-resolution (UHR) remote sensing VQA, where task-relevant cues are sparse and tiny. However, we observe a consistent failure mode in existing zoom-enabled MLLMs: Tool Usage Homogenization, where tool calls collapse into task-agnostic patterns, limiting effective evidence acquisition. To address this, we propose GeoEyes, a staged training framework consisting of (1) a cold-start SFT dataset, UHR Chain-of-Zoom (UHR-CoZ), which covers diverse zooming regimes, and (2) an agentic reinforcement learning method, AdaZoom-GRPO, that explicitly rewards evidence gain and answer improvement during zoom interactions. The resulting model learns on-demand zooming with proper stopping behavior and achieves substantial improvements on UHR remote sensing benchmarks, with 54.23% accuracy on XLRS-Bench.
Text Before Vision: Staged Knowledge Injection Matters for Agentic RLVR in Ultra-High-Resolution Remote Sensing Understanding
Feb 15, 2026Multimodal reasoning for ultra-high-resolution (UHR) remote sensing (RS) is usually bottlenecked by visual evidence acquisition: the model necessitates localizing tiny task-relevant regions in massive pixel spaces. While Agentic Reinforcement Learning with Verifiable Rewards (RLVR) using zoom-in tools offers a path forward, we find that standard reinforcement learning struggles to navigate these vast visual spaces without structured domain priors. In this paper, we investigate the interplay between post-training paradigms: comparing Cold-start Supervised Fine-Tuning (SFT), RLVR, and Agentic RLVR on the UHR RS benchmark.Our controlled studies yield a counter-intuitive finding: high-quality Earth-science text-only QA is a primary driver of UHR visual reasoning gains. Despite lacking images, domain-specific text injects the concepts, mechanistic explanations, and decision rules necessary to guide visual evidence retrieval.Based on this, we propose a staged knowledge injection recipe: (1) cold-starting with scalable, knowledge-graph-verified Earth-science text QA to instill reasoning structures;and (2) "pre-warming" on the same hard UHR image-text examples during SFT to stabilize and amplify subsequent tool-based RL. This approach achieves a 60.40% Pass@1 on XLRS-Bench, significantly outperforming larger general purpose models (e.g., GPT-5.2, Gemini 3.0 Pro, Intern-S1) and establishing a new state-of-the-art.
OmniEarth-Bench: Towards Holistic Evaluation of Earth's Six Spheres and Cross-Spheres Interactions with Multimodal Observational Earth Data
May 29, 2025Existing benchmarks for Earth science multimodal learning exhibit critical limitations in systematic coverage of geosystem components and cross-sphere interactions, often constrained to isolated subsystems (only in Human-activities sphere or atmosphere) with limited evaluation dimensions (less than 16 tasks). To address these gaps, we introduce OmniEarth-Bench, the first comprehensive multimodal benchmark spanning all six Earth science spheres (atmosphere, lithosphere, Oceansphere, cryosphere, biosphere and Human-activities sphere) and cross-spheres with one hundred expert-curated evaluation dimensions. Leveraging observational data from satellite sensors and in-situ measurements, OmniEarth-Bench integrates 29,779 annotations across four tiers: perception, general reasoning, scientific knowledge reasoning and chain-of-thought (CoT) reasoning. This involves the efforts of 2-5 experts per sphere to establish authoritative evaluation dimensions and curate relevant observational datasets, 40 crowd-sourcing annotators to assist experts for annotations, and finally, OmniEarth-Bench is validated via hybrid expert-crowd workflows to reduce label ambiguity. Experiments on 9 state-of-the-art MLLMs reveal that even the most advanced models struggle with our benchmarks, where none of them reach 35\% accuracy. Especially, in some cross-spheres tasks, the performance of leading models like GPT-4o drops to 0.0\%. OmniEarth-Bench sets a new standard for geosystem-aware AI, advancing both scientific discovery and practical applications in environmental monitoring and disaster prediction. The dataset, source code, and trained models were released.
GeoLLaVA-8K: Scaling Remote-Sensing Multimodal Large Language Models to 8K Resolution
May 27, 2025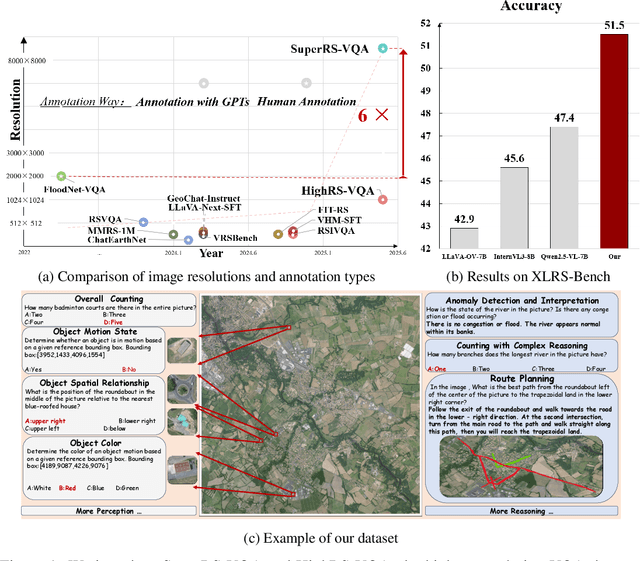

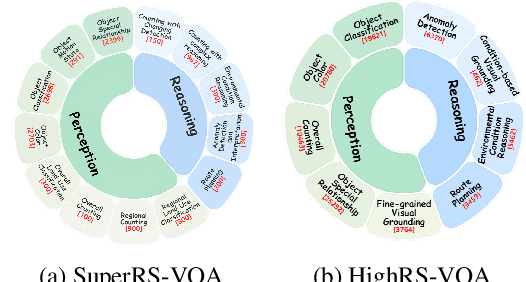

Ultra-high-resolution (UHR) remote sensing (RS) imagery offers valuable data for Earth observation but pose challenges for existing multimodal foundation models due to two key bottlenecks: (1) limited availability of UHR training data, and (2) token explosion caused by the large image size. To address data scarcity, we introduce SuperRS-VQA (avg. 8,376$\times$8,376) and HighRS-VQA (avg. 2,000$\times$1,912), the highest-resolution vision-language datasets in RS to date, covering 22 real-world dialogue tasks. To mitigate token explosion, our pilot studies reveal significant redundancy in RS images: crucial information is concentrated in a small subset of object-centric tokens, while pruning background tokens (e.g., ocean or forest) can even improve performance. Motivated by these findings, we propose two strategies: Background Token Pruning and Anchored Token Selection, to reduce the memory footprint while preserving key semantics.Integrating these techniques, we introduce GeoLLaVA-8K, the first RS-focused multimodal large language model capable of handling inputs up to 8K$\times$8K resolution, built on the LLaVA framework. Trained on SuperRS-VQA and HighRS-VQA, GeoLLaVA-8K sets a new state-of-the-art on the XLRS-Bench.
XLRS-Bench: Could Your Multimodal LLMs Understand Extremely Large Ultra-High-Resolution Remote Sensing Imagery?
Mar 31, 2025The astonishing breakthrough of multimodal large language models (MLLMs) has necessitated new benchmarks to quantitatively assess their capabilities, reveal their limitations, and indicate future research directions. However, this is challenging in the context of remote sensing (RS), since the imagery features ultra-high resolution that incorporates extremely complex semantic relationships. Existing benchmarks usually adopt notably smaller image sizes than real-world RS scenarios, suffer from limited annotation quality, and consider insufficient dimensions of evaluation. To address these issues, we present XLRS-Bench: a comprehensive benchmark for evaluating the perception and reasoning capabilities of MLLMs in ultra-high-resolution RS scenarios. XLRS-Bench boasts the largest average image size (8500$\times$8500) observed thus far, with all evaluation samples meticulously annotated manually, assisted by a novel semi-automatic captioner on ultra-high-resolution RS images. On top of the XLRS-Bench, 16 sub-tasks are defined to evaluate MLLMs' 10 kinds of perceptual capabilities and 6 kinds of reasoning capabilities, with a primary emphasis on advanced cognitive processes that facilitate real-world decision-making and the capture of spatiotemporal changes. The results of both general and RS-focused MLLMs on XLRS-Bench indicate that further efforts are needed for real-world RS applications. We have open-sourced XLRS-Bench to support further research in developing more powerful MLLMs for remote sensing.
RoMA: Scaling up Mamba-based Foundation Models for Remote Sensing
Mar 13, 2025Recent advances in self-supervised learning for Vision Transformers (ViTs) have fueled breakthroughs in remote sensing (RS) foundation models. However, the quadratic complexity of self-attention poses a significant barrier to scalability, particularly for large models and high-resolution images. While the linear-complexity Mamba architecture offers a promising alternative, existing RS applications of Mamba remain limited to supervised tasks on small, domain-specific datasets. To address these challenges, we propose RoMA, a framework that enables scalable self-supervised pretraining of Mamba-based RS foundation models using large-scale, diverse, unlabeled data. RoMA enhances scalability for high-resolution images through a tailored auto-regressive learning strategy, incorporating two key innovations: 1) a rotation-aware pretraining mechanism combining adaptive cropping with angular embeddings to handle sparsely distributed objects with arbitrary orientations, and 2) multi-scale token prediction objectives that address the extreme variations in object scales inherent to RS imagery. Systematic empirical studies validate that Mamba adheres to RS data and parameter scaling laws, with performance scaling reliably as model and data size increase. Furthermore, experiments across scene classification, object detection, and semantic segmentation tasks demonstrate that RoMA-pretrained Mamba models consistently outperform ViT-based counterparts in both accuracy and computational efficiency. The source code and pretrained models will be released at https://github.com/MiliLab/RoMA.