 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting Peng's Q for Modern Reinforcement Learning
Feb 27, 2021
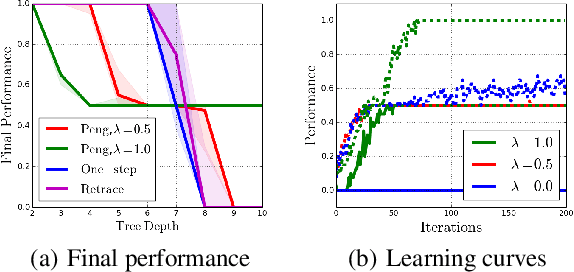

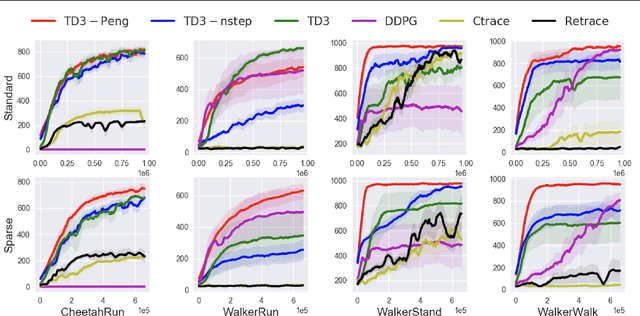
Off-policy multi-step reinforcement learning algorithms consist of conservative and non-conservative algorithms: the former actively cut traces, whereas the latter do not. Recently, Munos et al. (2016) proved the convergence of conservative algorithms to an optimal Q-function. In contrast, non-conservative algorithms are thought to be unsafe and have a limited or no theoretical guarantee. Nonetheless, recent studies have shown that non-conservative algorithms empirically outperform conservative ones. Motivated by the empirical results and the lack of theory, we carry out theoretical analyses of Peng's Q($\lambda$), a representative example of non-conservative algorithms. We prove that it also converges to an optimal policy provided that the behavior policy slowly tracks a greedy policy in a way similar to conservative policy iteration. Such a result has been conjectured to be true but has not been proven. We also experiment with Peng's Q($\lambda$) in complex continuous control tasks, confirming that Peng's Q($\lambda$) often outperforms conservative algorithms despite its simplicity. These results indicate that Peng's Q($\lambda$), which was thought to be unsafe, is a theoretically-sound and practically effective algorithm.
Mine Your Own vieW: Self-Supervised Learning Through Across-Sample Prediction
Feb 19, 2021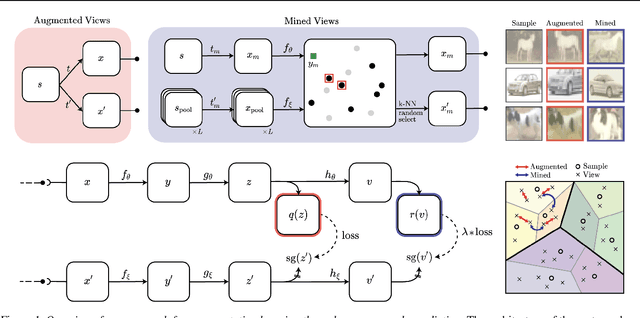
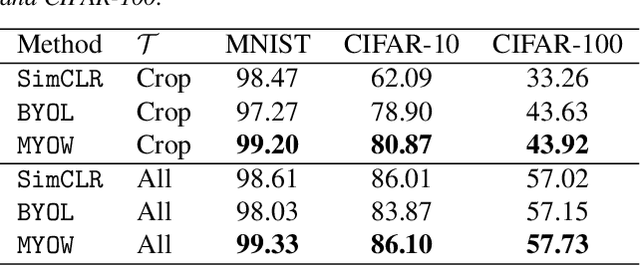
State-of-the-art methods for self-supervised learning (SSL) build representations by maximizing the similarity between different augmented "views" of a sample. Because these approaches try to match views of the same sample, they can be too myopic and fail to produce meaningful results when augmentations are not sufficiently rich. This motivates the use of the dataset itself to find similar, yet distinct, samples to serve as views for one another. In this paper, we introduce Mine Your Own vieW (MYOW), a new approach for building across-sample prediction into SSL. The idea behind our approach is to actively mine views, finding samples that are close in the representation space of the network, and then predict, from one sample's latent representation, the representation of a nearby sample. In addition to showing the promise of MYOW on standard datasets used in computer vision, we highlight the power of this idea in a novel application in neuroscience where rich augmentations are not already established. When applied to neural datasets, MYOW outperforms other self-supervised approaches in all examples (in some cases by more than 10%), and surpasses the supervised baseline for most datasets. By learning to predict the latent representation of similar samples, we show that it is possible to learn good representations in new domains where augmentations are still limited.
Bootstrapped Representation Learning on Graphs
Feb 12, 2021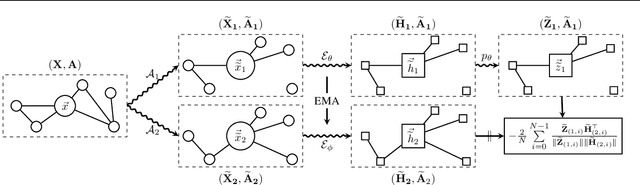
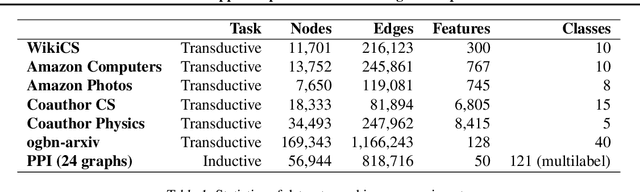
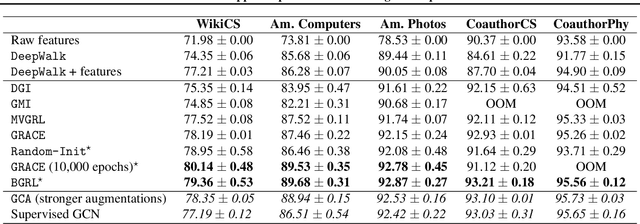
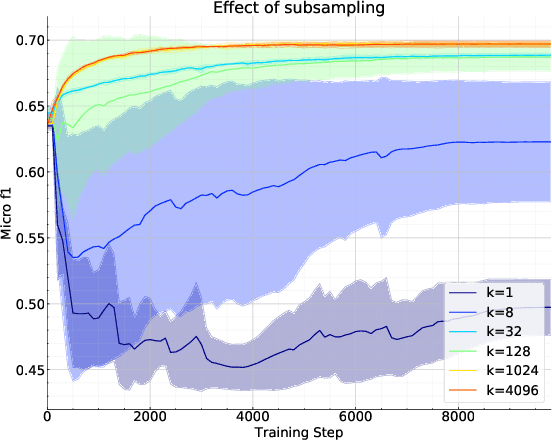
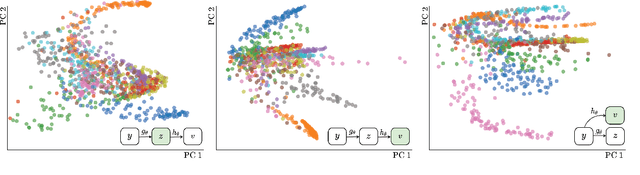
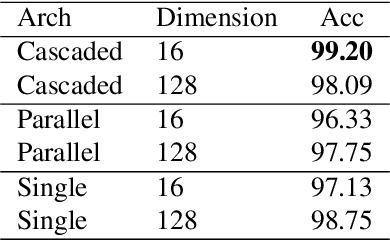
Current state-of-the-art self-supervised learning methods for graph neural networks (GNNs) are based on contrastive learning. As such, they heavily depend on the construction of augmentations and negative examples. For example, on the standard PPI benchmark, increasing the number of negative pairs improves performance, thereby requiring computation and memory cost quadratic in the number of nodes to achieve peak performance. Inspired by BYOL, a recently introduced method for self-supervised learning that does not require negative pairs, we present Bootstrapped Graph Latents, BGRL, a self-supervised graph representation method that gets rid of this potentially quadratic bottleneck. BGRL outperforms or matches the previous unsupervised state-of-the-art results on several established benchmark datasets. Moreover, it enables the effective usage of graph attentional (GAT) encoders, allowing us to further improve the state of the art. In particular on the PPI dataset, using GAT as an encoder we achieve state-of-the-art 70.49% Micro-F1, using the linear evaluation protocol. On all other datasets under consideration, our model is competitive with the equivalent supervised GNN results, often exceeding them.
Geometric Entropic Exploration
Jan 07, 2021
Exploration is essential for solving complex Reinforcement Learning (RL) tasks. Maximum State-Visitation Entropy (MSVE) formulates the exploration problem as a well-defined policy optimization problem whose solution aims at visiting all states as uniformly as possible. This is in contrast to standard uncertainty-based approaches where exploration is transient and eventually vanishes. However, existing approaches to MSVE are theoretically justified only for discrete state-spaces as they are oblivious to the geometry of continuous domains. We address this challenge by introducing Geometric Entropy Maximisation (GEM), a new algorithm that maximises the geometry-aware Shannon entropy of state-visits in both discrete and continuous domains. Our key theoretical contribution is casting geometry-aware MSVE exploration as a tractable problem of optimising a simple and novel noise-contrastive objective function. In our experiments, we show the efficiency of GEM in solving several RL problems with sparse rewards, compared against other deep RL exploration approaches.
Improved Sample Complexity for Incremental Autonomous Exploration in MDPs
Dec 29, 2020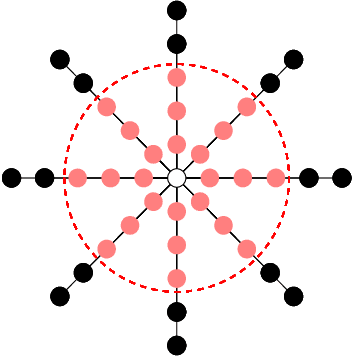
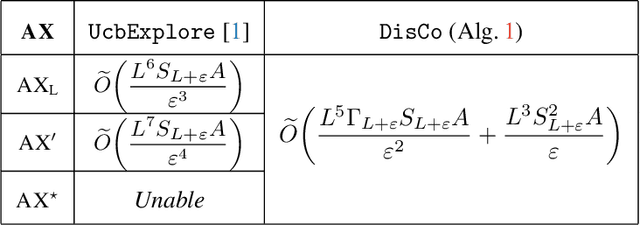
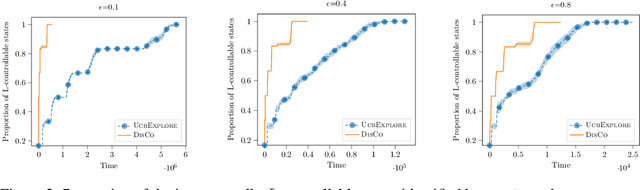
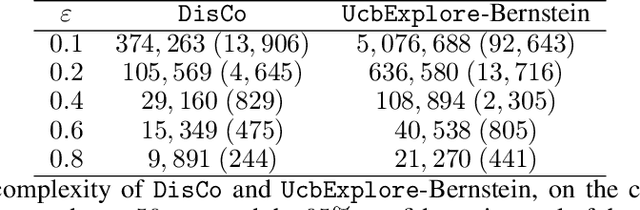
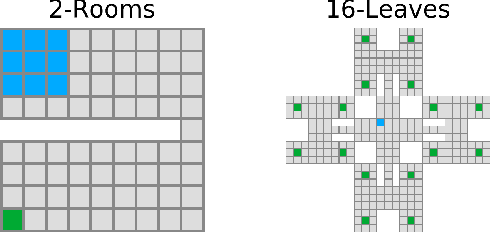
We investigate the exploration of an unknown environment when no reward function is provided. Building on the incremental exploration setting introduced by Lim and Auer [1], we define the objective of learning the set of $\epsilon$-optimal goal-conditioned policies attaining all states that are incrementally reachable within $L$ steps (in expectation) from a reference state $s_0$. In this paper, we introduce a novel model-based approach that interleaves discovering new states from $s_0$ and improving the accuracy of a model estimate that is used to compute goal-conditioned policies to reach newly discovered states. The resulting algorithm, DisCo, achieves a sample complexity scaling as $\tilde{O}(L^5 S_{L+\epsilon} \Gamma_{L+\epsilon} A \epsilon^{-2})$, where $A$ is the number of actions, $S_{L+\epsilon}$ is the number of states that are incrementally reachable from $s_0$ in $L+\epsilon$ steps, and $\Gamma_{L+\epsilon}$ is the branching factor of the dynamics over such states. This improves over the algorithm proposed in [1] in both $\epsilon$ and $L$ at the cost of an extra $\Gamma_{L+\epsilon}$ factor, which is small in most environments of interest. Furthermore, DisCo is the first algorithm that can return an $\epsilon/c_{\min}$-optimal policy for any cost-sensitive shortest-path problem defined on the $L$-reachable states with minimum cost $c_{\min}$. Finally, we report preliminary empirical results confirming our theoretical findings.
Game Plan: What AI can do for Football, and What Football can do for AI
Nov 18, 2020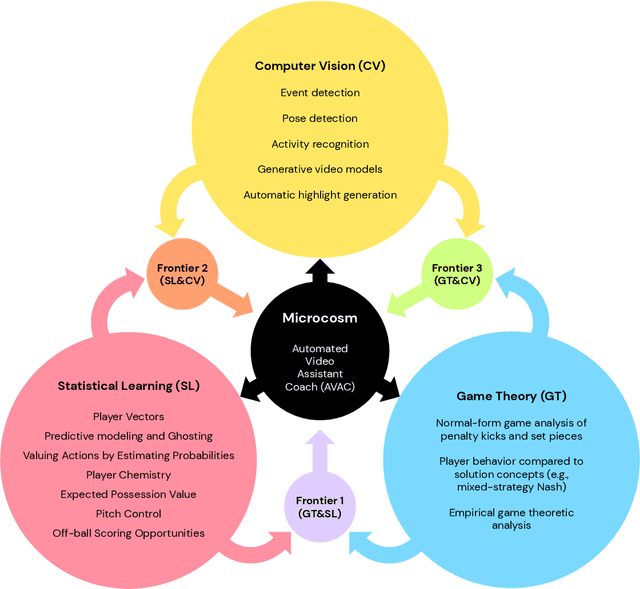
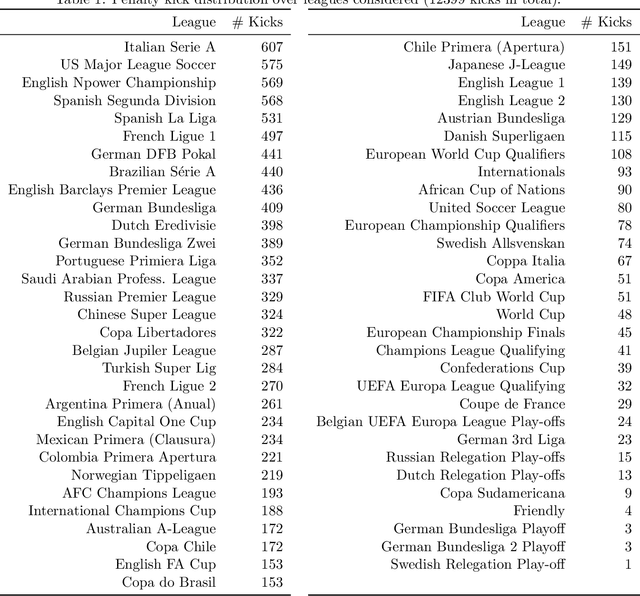

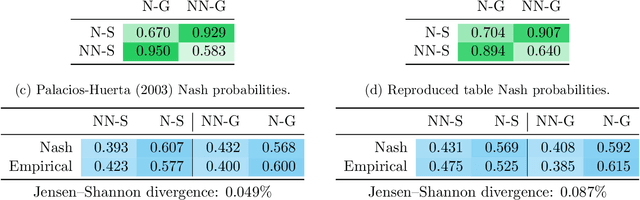
The rapid progress in artificial intelligence (AI) and machine learning has opened unprecedented analytics possibilities in various team and individual sports, including baseball, basketball, and tennis. More recently, AI techniques have been applied to football, due to a huge increase in data collection by professional teams, increased computational power, and advances in machine learning, with the goal of better addressing new scientific challenges involved in the analysis of both individual players' and coordinated teams' behaviors. The research challenges associated with predictive and prescriptive football analytics require new developments and progress at the intersection of statistical learning, game theory, and computer vision. In this paper, we provide an overarching perspective highlighting how the combination of these fields, in particular, forms a unique microcosm for AI research, while offering mutual benefits for professional teams, spectators, and broadcasters in the years to come. We illustrate that this duality makes football analytics a game changer of tremendous value, in terms of not only changing the game of football itself, but also in terms of what this domain can mean for the field of AI. We review the state-of-the-art and exemplify the types of analysis enabled by combining the aforementioned fields, including illustrative examples of counterfactual analysis using predictive models, and the combination of game-theoretic analysis of penalty kicks with statistical learning of player attributes. We conclude by highlighting envisioned downstream impacts, including possibilities for extensions to other sports (real and virtual).
BYOL works even without batch statistics
Oct 20, 2020

Bootstrap Your Own Latent (BYOL) is a self-supervised learning approach for image representation. From an augmented view of an image, BYOL trains an online network to predict a target network representation of a different augmented view of the same image. Unlike contrastive methods, BYOL does not explicitly use a repulsion term built from negative pairs in its training objective. Yet, it avoids collapse to a trivial, constant representation. Thus, it has recently been hypothesized that batch normalization (BN) is critical to prevent collapse in BYOL. Indeed, BN flows gradients across batch elements, and could leak information about negative views in the batch, which could act as an implicit negative (contrastive) term. However, we experimentally show that replacing BN with a batch-independent normalization scheme (namely, a combination of group normalization and weight standardization) achieves performance comparable to vanilla BYOL ($73.9\%$ vs. $74.3\%$ top-1 accuracy under the linear evaluation protocol on ImageNet with ResNet-$50$). Our finding disproves the hypothesis that the use of batch statistics is a crucial ingredient for BYOL to learn useful representations.
Episodic Reinforcement Learning in Finite MDPs: Minimax Lower Bounds Revisited
Oct 07, 2020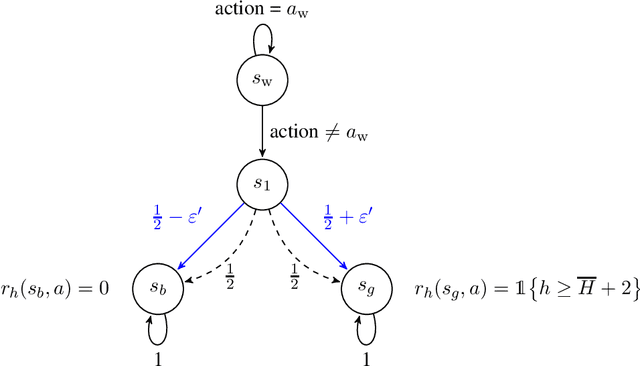
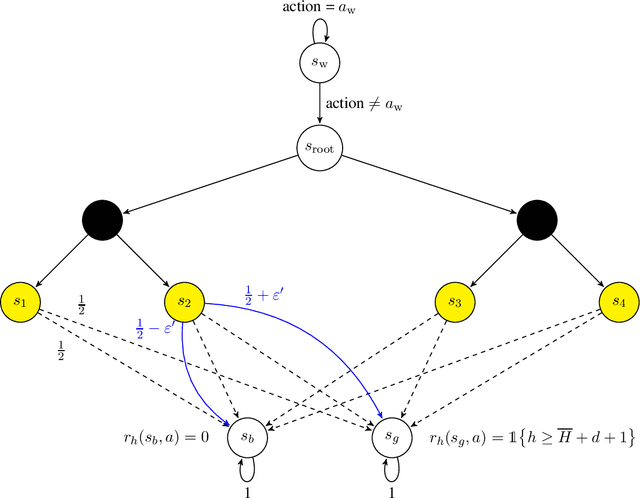
In this paper, we propose new problem-independent lower bounds on the sample complexity and regret in episodic MDPs, with a particular focus on the non-stationary case in which the transition kernel is allowed to change in each stage of the episode. Our main contribution is a novel lower bound of $\Omega((H^3SA/\epsilon^2)\log(1/\delta))$ on the sample complexity of an $(\varepsilon,\delta)$-PAC algorithm for best policy identification in a non-stationary MDP. This lower bound relies on a construction of "hard MDPs" which is different from the ones previously used in the literature. Using this same class of MDPs, we also provide a rigorous proof of the $\Omega(\sqrt{H^3SAT})$ regret bound for non-stationary MDPs. Finally, we discuss connections to PAC-MDP lower bounds.
Fast active learning for pure exploration in reinforcement learning
Jul 27, 2020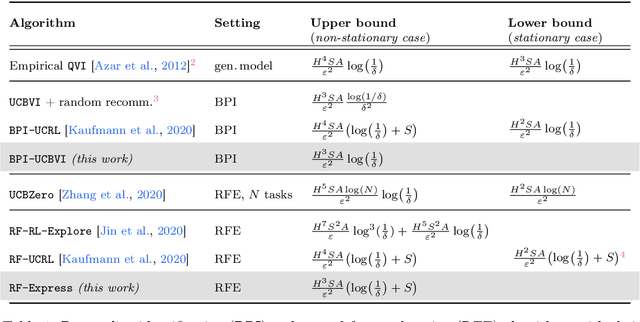
Realistic environments often provide agents with very limited feedback. When the environment is initially unknown, the feedback, in the beginning, can be completely absent, and the agents may first choose to devote all their effort on exploring efficiently. The exploration remains a challenge while it has been addressed with many hand-tuned heuristics with different levels of generality on one side, and a few theoretically-backed exploration strategies on the other. Many of them are incarnated by intrinsic motivation and in particular explorations bonuses. A common rule of thumb for exploration bonuses is to use $1/\sqrt{n}$ bonus that is added to the empirical estimates of the reward, where $n$ is a number of times this particular state (or a state-action pair) was visited. We show that, surprisingly, for a pure-exploration objective of reward-free exploration, bonuses that scale with $1/n$ bring faster learning rates, improving the known upper bounds with respect to the dependence on the horizon $H$. Furthermore, we show that with an improved analysis of the stopping time, we can improve by a factor $H$ the sample complexity in the best-policy identification setting, which is another pure-exploration objective, where the environment provides rewards but the agent is not penalized for its behavior during the exploration phase.
Monte-Carlo Tree Search as Regularized Policy Optimization
Jul 24, 2020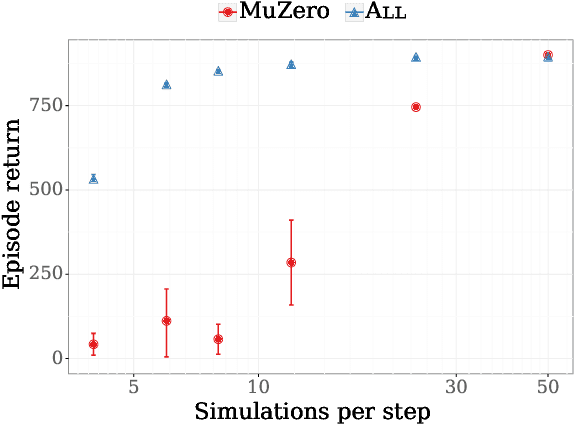
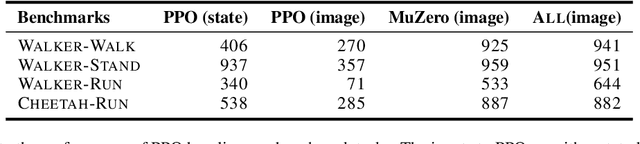

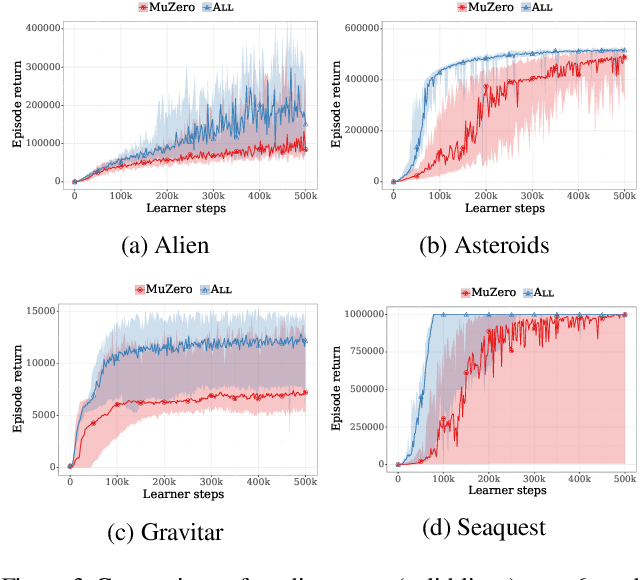
The combination of Monte-Carlo tree search (MCTS) with deep reinforcement learning has led to significant advances in artificial intelligence. However, AlphaZero, the current state-of-the-art MCTS algorithm, still relies on handcrafted heuristics that are only partially understood. In this paper, we show that AlphaZero's search heuristics, along with other common ones such as UCT, are an approximation to the solution of a specific regularized policy optimization problem. With this insight, we propose a variant of AlphaZero which uses the exact solution to this policy optimization problem, and show experimentally that it reliably outperforms the original algorithm in multiple domains.