 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Dialogue Annotation for Multi-Modal Common Ground
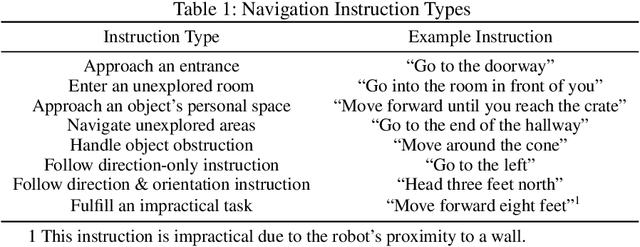
Nov 19, 2024In this paper, we describe the development of symbolic representations annotated on human-robot dialogue data to make dimensions of meaning accessible to autonomous systems participating in collaborative, natural language dialogue, and to enable common ground with human partners. A particular challenge for establishing common ground arises in remote dialogue (occurring in disaster relief or search-and-rescue tasks), where a human and robot are engaged in a joint navigation and exploration task of an unfamiliar environment, but where the robot cannot immediately share high quality visual information due to limited communication constraints. Engaging in a dialogue provides an effective way to communicate, while on-demand or lower-quality visual information can be supplemented for establishing common ground. Within this paradigm, we capture propositional semantics and the illocutionary force of a single utterance within the dialogue through our Dialogue-AMR annotation, an augmentation of Abstract Meaning Representation. We then capture patterns in how different utterances within and across speaker floors relate to one another in our development of a multi-floor Dialogue Structure annotation schema. Finally, we begin to annotate and analyze the ways in which the visual modalities provide contextual information to the dialogue for overcoming disparities in the collaborators' understanding of the environment. We conclude by discussing the use-cases, architectures, and systems we have implemented from our annotations that enable physical robots to autonomously engage with humans in bi-directional dialogue and navigation.
* 52 pages, 14 figures
SCOUT: A Situated and Multi-Modal Human-Robot Dialogue Corpus
Nov 19, 2024



We introduce the Situated Corpus Of Understanding Transactions (SCOUT), a multi-modal collection of human-robot dialogue in the task domain of collaborative exploration. The corpus was constructed from multiple Wizard-of-Oz experiments where human participants gave verbal instructions to a remotely-located robot to move and gather information about its surroundings. SCOUT contains 89,056 utterances and 310,095 words from 278 dialogues averaging 320 utterances per dialogue. The dialogues are aligned with the multi-modal data streams available during the experiments: 5,785 images and 30 maps. The corpus has been annotated with Abstract Meaning Representation and Dialogue-AMR to identify the speaker's intent and meaning within an utterance, and with Transactional Units and Relations to track relationships between utterances to reveal patterns of the Dialogue Structure. We describe how the corpus and its annotations have been used to develop autonomous human-robot systems and enable research in open questions of how humans speak to robots. We release this corpus to accelerate progress in autonomous, situated, human-robot dialogue, especially in the context of navigation tasks where details about the environment need to be discovered.
* 14 pages, 7 figures
Dialogue with Robots: Proposals for Broadening Participation and Research in the SLIVAR Community
Apr 01, 2024


The ability to interact with machines using natural human language is becoming not just commonplace, but expected. The next step is not just text interfaces, but speech interfaces and not just with computers, but with all machines including robots. In this paper, we chronicle the recent history of this growing field of spoken dialogue with robots and offer the community three proposals, the first focused on education, the second on benchmarks, and the third on the modeling of language when it comes to spoken interaction with robots. The three proposals should act as white papers for any researcher to take and build upon.
DOROTHIE: Spoken Dialogue for Handling Unexpected Situations in Interactive Autonomous Driving Agents
Oct 22, 2022



In the real world, autonomous driving agents navigate in highly dynamic environments full of unexpected situations where pre-trained models are unreliable. In these situations, what is immediately available to vehicles is often only human operators. Empowering autonomous driving agents with the ability to navigate in a continuous and dynamic environment and to communicate with humans through sensorimotor-grounded dialogue becomes critical. To this end, we introduce Dialogue On the ROad To Handle Irregular Events (DOROTHIE), a novel interactive simulation platform that enables the creation of unexpected situations on the fly to support empirical studies on situated communication with autonomous driving agents. Based on this platform, we created the Situated Dialogue Navigation (SDN), a navigation benchmark of 183 trials with a total of 8415 utterances, around 18.7 hours of control streams, and 2.9 hours of trimmed audio. SDN is developed to evaluate the agent's ability to predict dialogue moves from humans as well as generate its own dialogue moves and physical navigation actions. We further developed a transformer-based baseline model for these SDN tasks. Our empirical results indicate that language guided-navigation in a highly dynamic environment is an extremely difficult task for end-to-end models. These results will provide insight towards future work on robust autonomous driving agents. The DOROTHIE platform, SDN benchmark, and code for the baseline model are available at https://github.com/sled-group/DOROTHIE.
Decision-Theoretic Question Generation for Situated Reference Resolution: An Empirical Study and Computational Model
Oct 12, 2021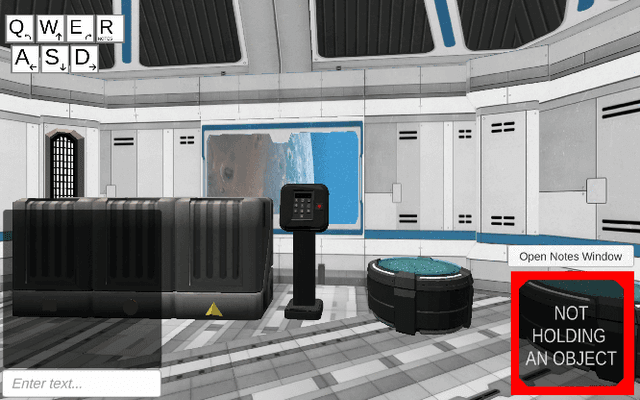

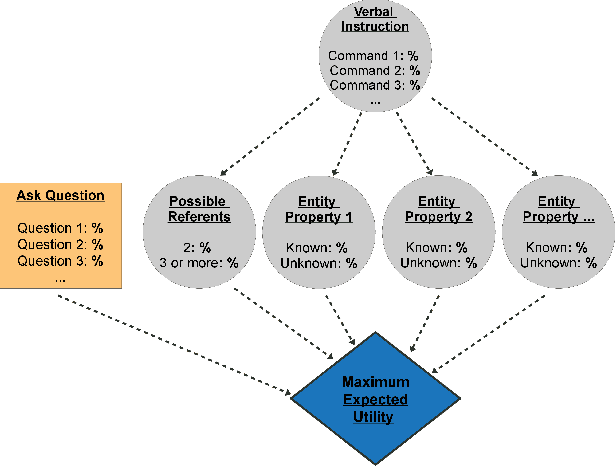
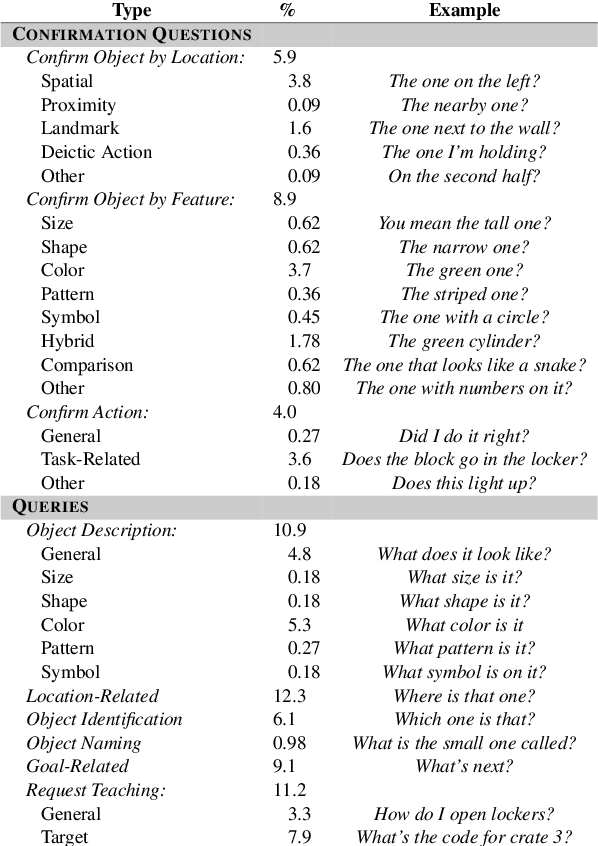
Dialogue agents that interact with humans in situated environments need to manage referential ambiguity across multiple modalities and ask for help as needed. However, it is not clear what kinds of questions such agents should ask nor how the answers to such questions can be used to resolve ambiguity. To address this, we analyzed dialogue data from an interactive study in which participants controlled a virtual robot tasked with organizing a set of tools while engaging in dialogue with a live, remote experimenter. We discovered a number of novel results, including the distribution of question types used to resolve ambiguity and the influence of dialogue-level factors on the reference resolution process. Based on these empirical findings we: (1) developed a computational model for clarification requests using a decision network with an entropy-based utility assignment method that operates across modalities, (2) evaluated the model, showing that it outperforms a slot-filling baseline in environments of varying ambiguity, and (3) interpreted the results to offer insight into the ways that agents can ask questions to facilitate situated reference resolution.
How Should Agents Ask Questions For Situated Learning? An Annotated Dialogue Corpus
Jun 11, 2021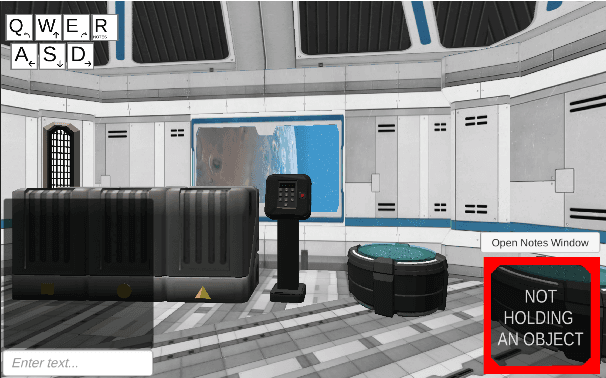
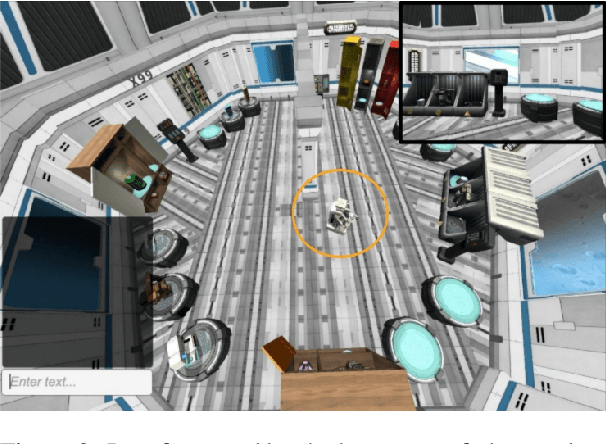
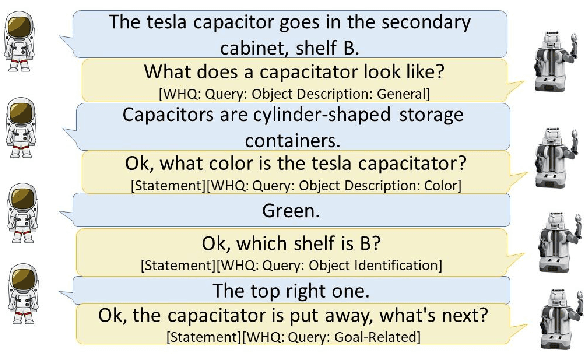
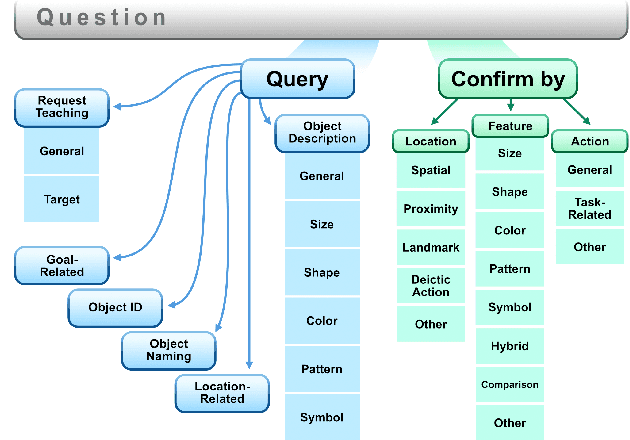
Intelligent agents that are confronted with novel concepts in situated environments will need to ask their human teammates questions to learn about the physical world. To better understand this problem, we need data about asking questions in situated task-based interactions. To this end, we present the Human-Robot Dialogue Learning (HuRDL) Corpus - a novel dialogue corpus collected in an online interactive virtual environment in which human participants play the role of a robot performing a collaborative tool-organization task. We describe the corpus data and a corresponding annotation scheme to offer insight into the form and content of questions that humans ask to facilitate learning in a situated environment. We provide the corpus as an empirically-grounded resource for improving question generation in situated intelligent agents.
Spoken Language Interaction with Robots: Research Issues and Recommendations, Report from the NSF Future Directions Workshop
Nov 11, 2020
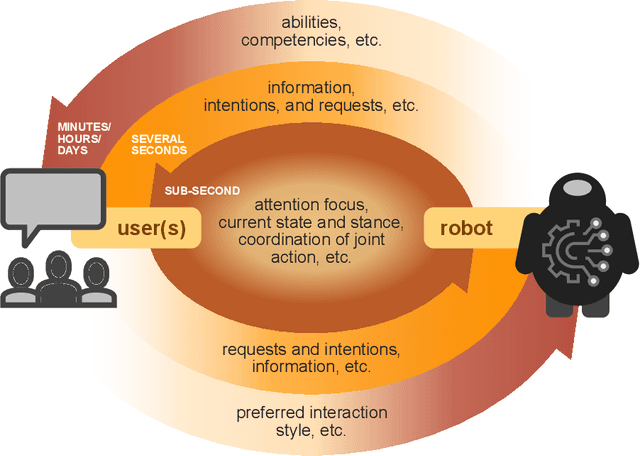
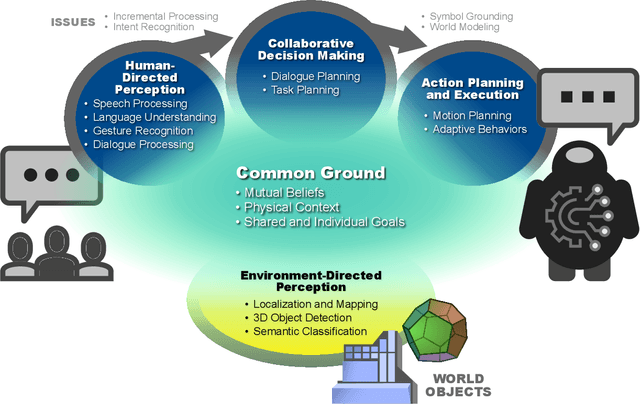
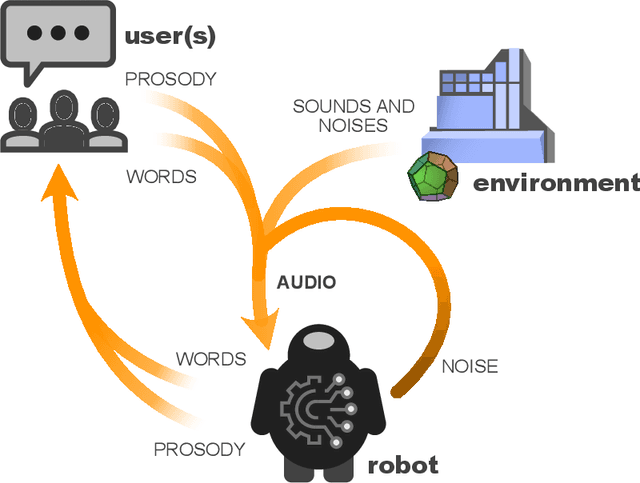
With robotics rapidly advancing, more effective human-robot interaction is increasingly needed to realize the full potential of robots for society. While spoken language must be part of the solution, our ability to provide spoken language interaction capabilities is still very limited. The National Science Foundation accordingly convened a workshop, bringing together speech, language, and robotics researchers to discuss what needs to be done. The result is this report, in which we identify key scientific and engineering advances needed. Our recommendations broadly relate to eight general themes. First, meeting human needs requires addressing new challenges in speech technology and user experience design. Second, this requires better models of the social and interactive aspects of language use. Third, for robustness, robots need higher-bandwidth communication with users and better handling of uncertainty, including simultaneous consideration of multiple hypotheses and goals. Fourth, more powerful adaptation methods are needed, to enable robots to communicate in new environments, for new tasks, and with diverse user populations, without extensive re-engineering or the collection of massive training data. Fifth, since robots are embodied, speech should function together with other communication modalities, such as gaze, gesture, posture, and motion. Sixth, since robots operate in complex environments, speech components need access to rich yet efficient representations of what the robot knows about objects, locations, noise sources, the user, and other humans. Seventh, since robots operate in real time, their speech and language processing components must also. Eighth, in addition to more research, we need more work on infrastructure and resources, including shareable software modules and internal interfaces, inexpensive hardware, baseline systems, and diverse corpora.
Towards Preference Learning for Autonomous Ground Robot Navigation Tasks
Nov 05, 2020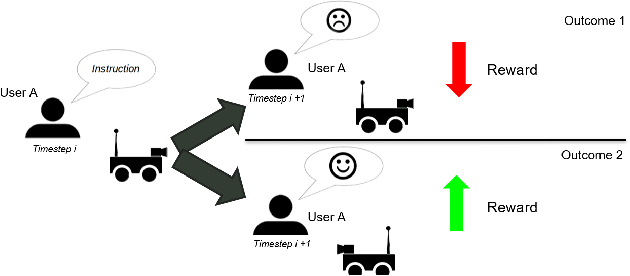
We are interested in the design of autonomous robot behaviors that learn the preferences of users over continued interactions, with the goal of efficiently executing navigation behaviors in a way that the user expects. In this paper, we discuss our work in progress to modify a general model for robot navigation behaviors in an exploration task on a per-user basis using preference-based reinforcement learning. The novel contribution of this approach is that it combines reinforcement learning, motion planning, and natural language processing to allow an autonomous agent to learn from sustained dialogue with a human teammate as opposed to one-off instructions.
A Research Platform for Multi-Robot Dialogue with Humans
Oct 12, 2019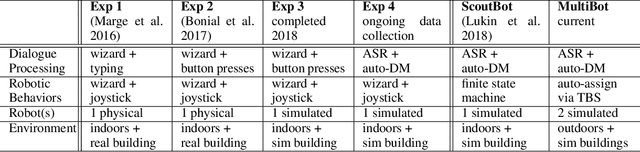
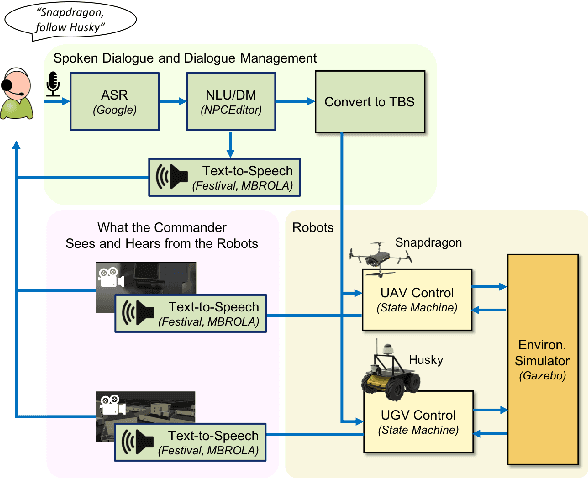
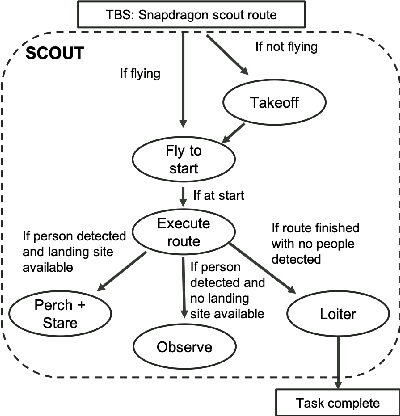
This paper presents a research platform that supports spoken dialogue interaction with multiple robots. The demonstration showcases our crafted MultiBot testing scenario in which users can verbally issue search, navigate, and follow instructions to two robotic teammates: a simulated ground robot and an aerial robot. This flexible language and robotic platform takes advantage of existing tools for speech recognition and dialogue management that are compatible with new domains, and implements an inter-agent communication protocol (tactical behavior specification), where verbal instructions are encoded for tasks assigned to the appropriate robot.
Balancing Efficiency and Coverage in Human-Robot Dialogue Collection
Oct 07, 2018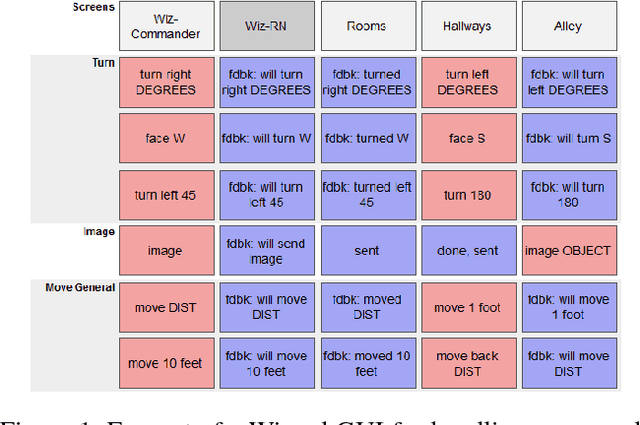
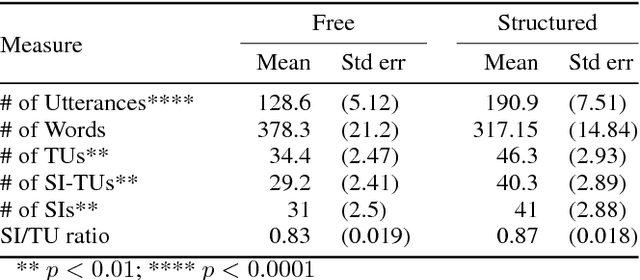
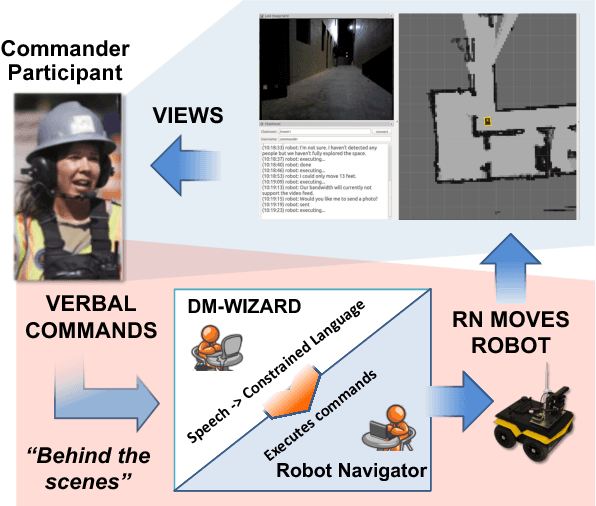
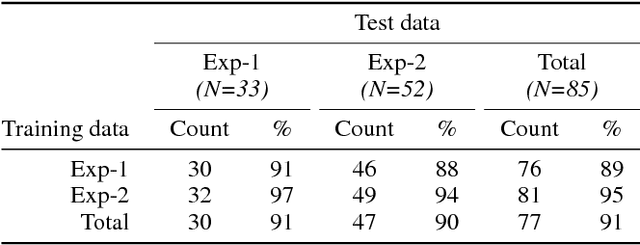
We describe a multi-phased Wizard-of-Oz approach to collecting human-robot dialogue in a collaborative search and navigation task. The data is being used to train an initial automated robot dialogue system to support collaborative exploration tasks. In the first phase, a wizard freely typed robot utterances to human participants. For the second phase, this data was used to design a GUI that includes buttons for the most common communications, and templates for communications with varying parameters. Comparison of the data gathered in these phases show that the GUI enabled a faster pace of dialogue while still maintaining high coverage of suitable responses, enabling more efficient targeted data collection, and improvements in natural language understanding using GUI-collected data. As a promising first step towards interactive learning, this work shows that our approach enables the collection of useful training data for navigation-based HRI tasks.