 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Altruistic Behaviours in Reinforcement Learning without External Rewards
Jul 22, 2021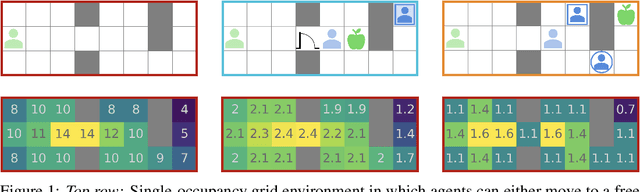
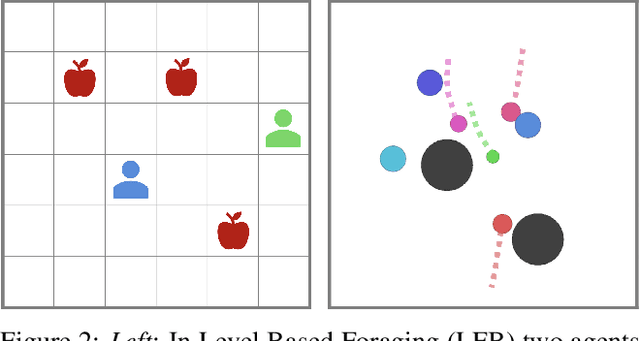
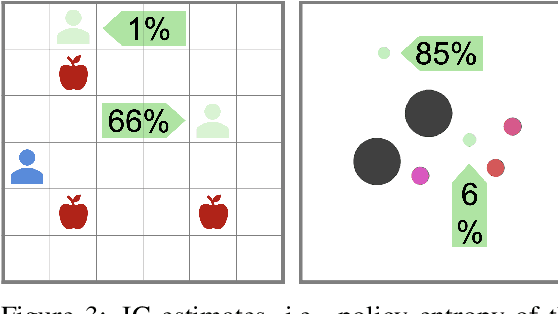
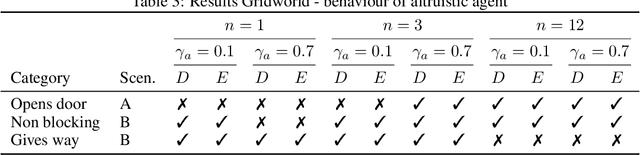
Can artificial agents learn to assist others in achieving their goals without knowing what those goals are? Generic reinforcement learning agents could be trained to behave altruistically towards others by rewarding them for altruistic behaviour, i.e., rewarding them for benefiting other agents in a given situation. Such an approach assumes that other agents' goals are known so that the altruistic agent can cooperate in achieving those goals. However, explicit knowledge of other agents' goals is often difficult to acquire. Even assuming such knowledge to be given, training of altruistic agents would require manually-tuned external rewards for each new environment. Thus, it is beneficial to develop agents that do not depend on external supervision and can learn altruistic behaviour in a task-agnostic manner. Assuming that other agents rationally pursue their goals, we hypothesize that giving them more choices will allow them to pursue those goals better. Some concrete examples include opening a door for others or safeguarding them to pursue their objectives without interference. We formalize this concept and propose an altruistic agent that learns to increase the choices another agent has by maximizing the number of states that the other agent can reach in its future. We evaluate our approach on three different multi-agent environments where another agent's success depends on the altruistic agent's behaviour. Finally, we show that our unsupervised agents can perform comparably to agents explicitly trained to work cooperatively. In some cases, our agents can even outperform the supervised ones.
Gradient Forward-Propagation for Large-Scale Temporal Video Modelling
Jul 12, 2021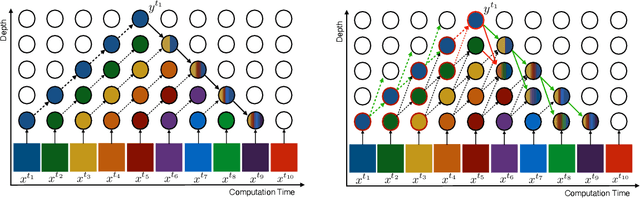
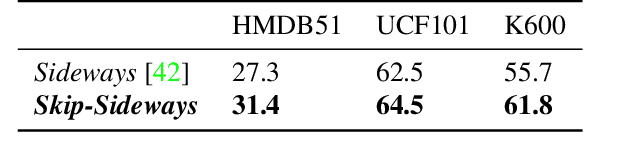
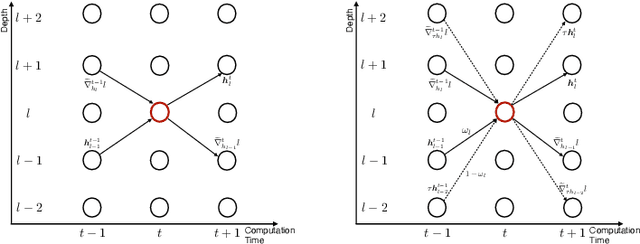
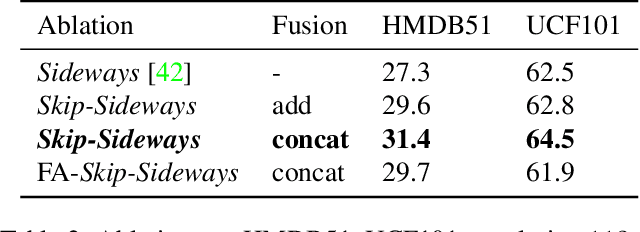
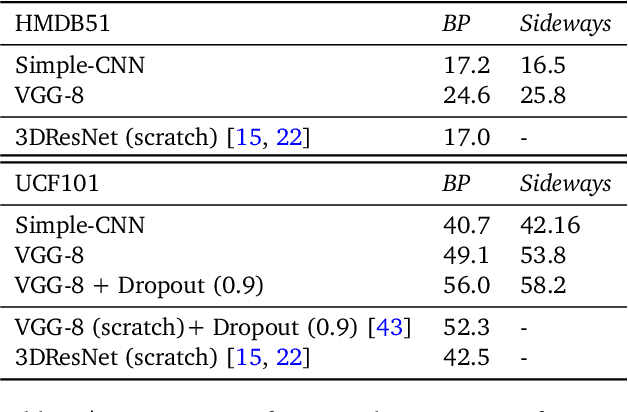
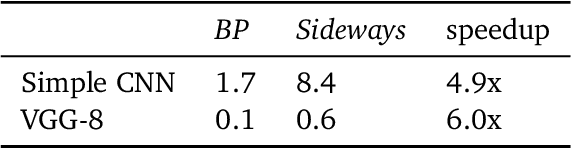
How can neural networks be trained on large-volume temporal data efficiently? To compute the gradients required to update parameters, backpropagation blocks computations until the forward and backward passes are completed. For temporal signals, this introduces high latency and hinders real-time learning. It also creates a coupling between consecutive layers, which limits model parallelism and increases memory consumption. In this paper, we build upon Sideways, which avoids blocking by propagating approximate gradients forward in time, and we propose mechanisms for temporal integration of information based on different variants of skip connections. We also show how to decouple computation and delegate individual neural modules to different devices, allowing distributed and parallel training. The proposed Skip-Sideways achieves low latency training, model parallelism, and, importantly, is capable of extracting temporal features, leading to more stable training and improved performance on real-world action recognition video datasets such as HMDB51, UCF101, and the large-scale Kinetics-600. Finally, we also show that models trained with Skip-Sideways generate better future frames than Sideways models, and hence they can better utilize motion cues.
Measuring and Improving BERT's Mathematical Abilities by Predicting the Order of Reasoning
Jun 07, 2021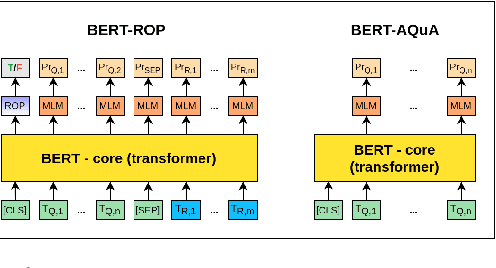
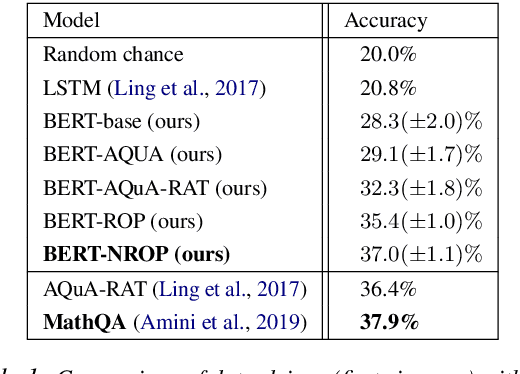
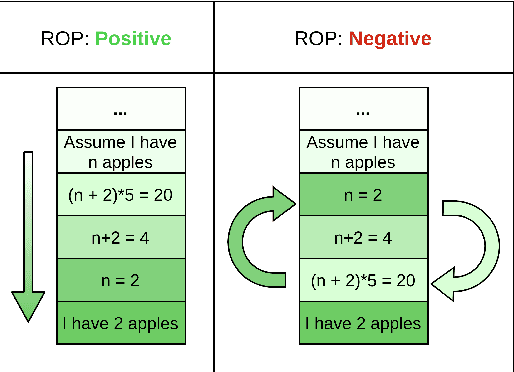
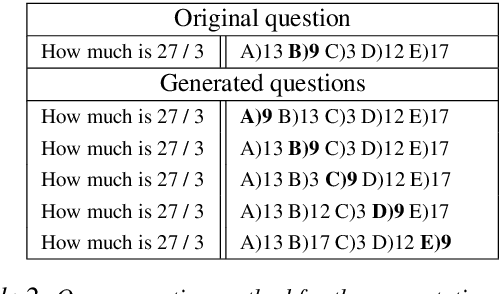
Imagine you are in a supermarket. You have two bananas in your basket and want to buy four apples. How many fruits do you have in total? This seemingly straightforward question can be challenging for data-driven language models, even if trained at scale. However, we would expect such generic language models to possess some mathematical abilities in addition to typical linguistic competence. Towards this goal, we investigate if a commonly used language model, BERT, possesses such mathematical abilities and, if so, to what degree. For that, we fine-tune BERT on a popular dataset for word math problems, AQuA-RAT, and conduct several tests to understand learned representations better. Since we teach models trained on natural language to do formal mathematics, we hypothesize that such models would benefit from training on semi-formal steps that explain how math results are derived. To better accommodate such training, we also propose new pretext tasks for learning mathematical rules. We call them (Neighbor) Reasoning Order Prediction (ROP or NROP). With this new model, we achieve significantly better outcomes than data-driven baselines and even on-par with more tailored models. We also show how to reduce positional bias in such models.
Broaden Your Views for Self-Supervised Video Learning
Mar 30, 2021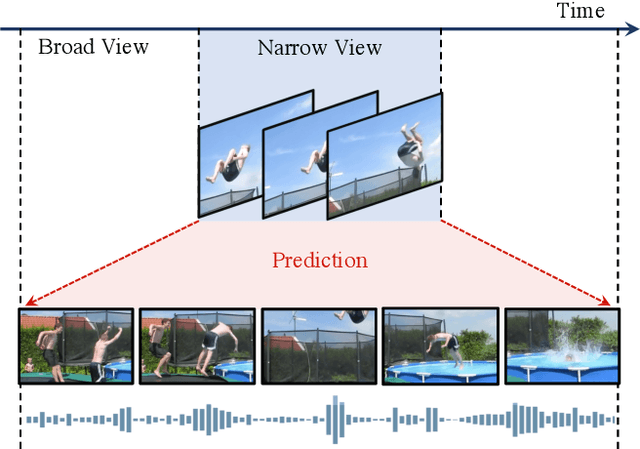
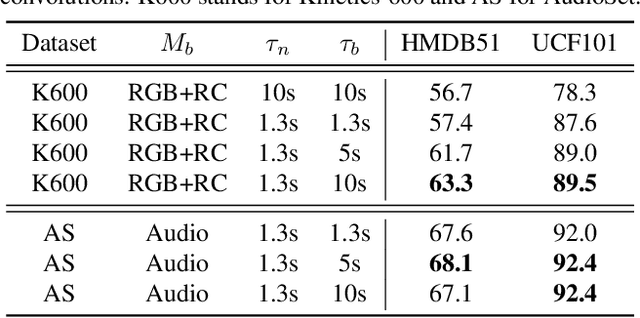
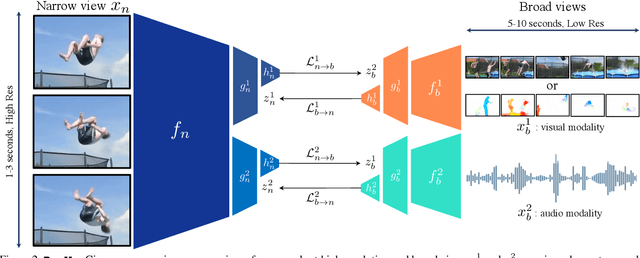
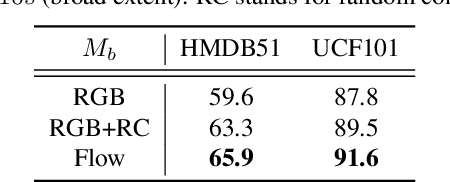
Most successful self-supervised learning methods are trained to align the representations of two independent views from the data. State-of-the-art methods in video are inspired by image techniques, where these two views are similarly extracted by cropping and augmenting the resulting crop. However, these methods miss a crucial element in the video domain: time. We introduce BraVe, a self-supervised learning framework for video. In BraVe, one of the views has access to a narrow temporal window of the video while the other view has a broad access to the video content. Our models learn to generalise from the narrow view to the general content of the video. Furthermore, BraVe processes the views with different backbones, enabling the use of alternative augmentations or modalities into the broad view such as optical flow, randomly convolved RGB frames, audio or their combinations. We demonstrate that BraVe achieves state-of-the-art results in self-supervised representation learning on standard video and audio classification benchmarks including UCF101, HMDB51, Kinetics, ESC-50 and AudioSet.
IReEn: Iterative Reverse-Engineering of Black-Box Functions via Neural Program Synthesis
Jun 18, 2020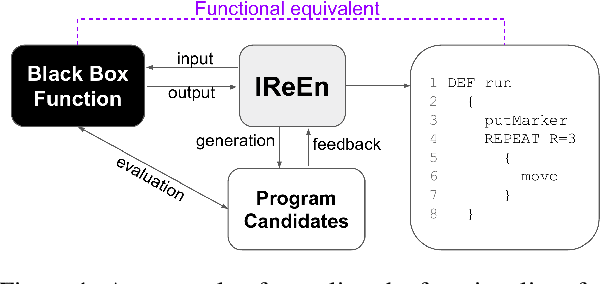
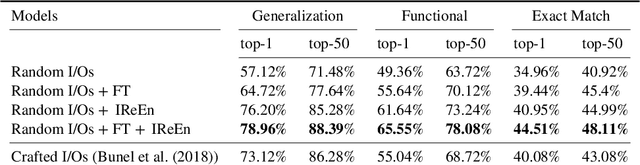
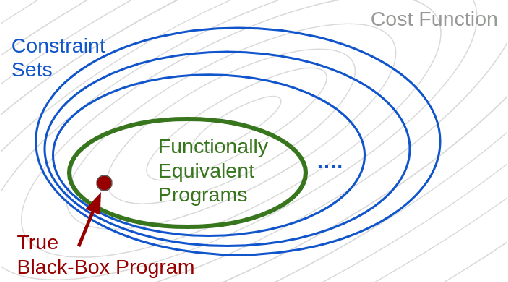
In this work, we investigate the problem of revealing the functionality of a black-box agent. Notably, we are interested in the interpretable and formal description of the behavior of such an agent. Ideally, this description would take the form of a program written in a high-level language. This task is also known as reverse engineering and plays a pivotal role in software engineering, computer security, but also most recently in interpretability. In contrast to prior work, we do not rely on privileged information on the black box, but rather investigate the problem under a weaker assumption of having only access to inputs and outputs of the program. We approach this problem by iteratively refining a candidate set using a generative neural program synthesis approach until we arrive at a functionally equivalent program. We assess the performance of our approach on the Karel dataset. Our results show that the proposed approach outperforms the state-of-the-art on this challenge by finding a functional equivalent program in 78% of cases -- even exceeding prior work that had privileged information on the black-box.
Visual Grounding in Video for Unsupervised Word Translation
Mar 26, 2020
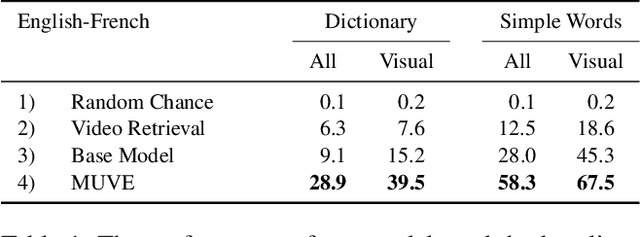
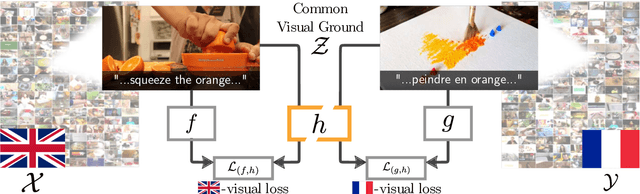
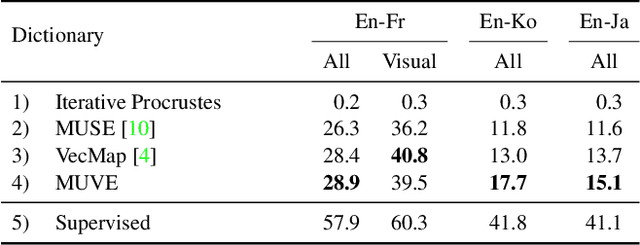
There are thousands of actively spoken languages on Earth, but a single visual world. Grounding in this visual world has the potential to bridge the gap between all these languages. Our goal is to use visual grounding to improve unsupervised word mapping between languages. The key idea is to establish a common visual representation between two languages by learning embeddings from unpaired instructional videos narrated in the native language. Given this shared embedding we demonstrate that (i) we can map words between the languages, particularly the 'visual' words; (ii) that the shared embedding provides a good initialization for existing unsupervised text-based word translation techniques, forming the basis for our proposed hybrid visual-text mapping algorithm, MUVE; and (iii) our approach achieves superior performance by addressing the shortcomings of text-based methods -- it is more robust, handles datasets with less commonality, and is applicable to low-resource languages. We apply these methods to translate words from English to French, Korean, and Japanese -- all without any parallel corpora and simply by watching many videos of people speaking while doing things.
* CVPR 2020
Sideways: Depth-Parallel Training of Video Models
Jan 17, 2020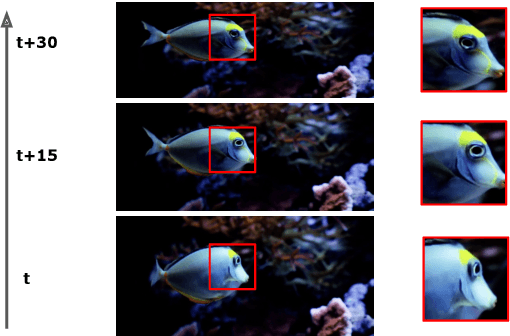
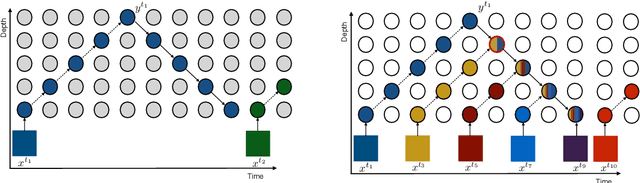
We propose Sideways, an approximate backpropagation scheme for training video models. In standard backpropagation, the gradients and activations at every computation step through the model are temporally synchronized. The forward activations need to be stored until the backward pass is executed, preventing inter-layer (depth) parallelization. However, can we leverage smooth, redundant input streams such as videos to develop a more efficient training scheme? Here, we explore an alternative to backpropagation; we overwrite network activations whenever new ones, i.e., from new frames, become available. Such a more gradual accumulation of information from both passes breaks the precise correspondence between gradients and activations, leading to theoretically more noisy weight updates. Counter-intuitively, we show that Sideways training of deep convolutional video networks not only still converges, but can also potentially exhibit better generalization compared to standard synchronized backpropagation.
Learning dynamic polynomial proofs
Jun 04, 2019
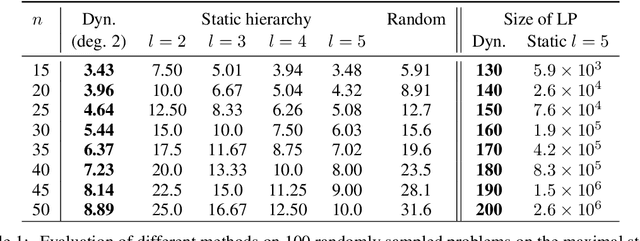
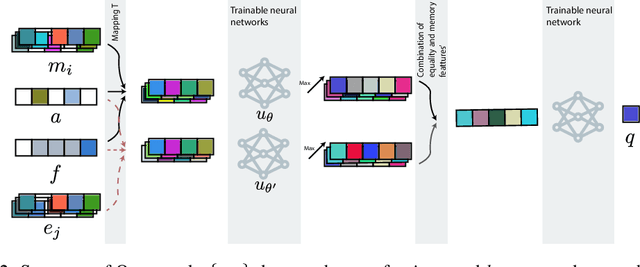
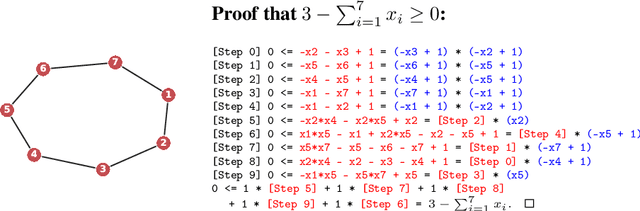
Polynomial inequalities lie at the heart of many mathematical disciplines. In this paper, we consider the fundamental computational task of automatically searching for proofs of polynomial inequalities. We adopt the framework of semi-algebraic proof systems that manipulate polynomial inequalities via elementary inference rules that infer new inequalities from the premises. These proof systems are known to be very powerful, but searching for proofs remains a major difficulty. In this work, we introduce a machine learning based method to search for a dynamic proof within these proof systems. We propose a deep reinforcement learning framework that learns an embedding of the polynomials and guides the choice of inference rules, taking the inherent symmetries of the problem as an inductive bias. We compare our approach with powerful and widely-studied linear programming hierarchies based on static proof systems, and show that our method reduces the size of the linear program by several orders of magnitude while also improving performance. These results hence pave the way towards augmenting powerful and well-studied semi-algebraic proof systems with machine learning guiding strategies for enhancing the expressivity of such proof systems.
The StreetLearn Environment and Dataset
Mar 04, 2019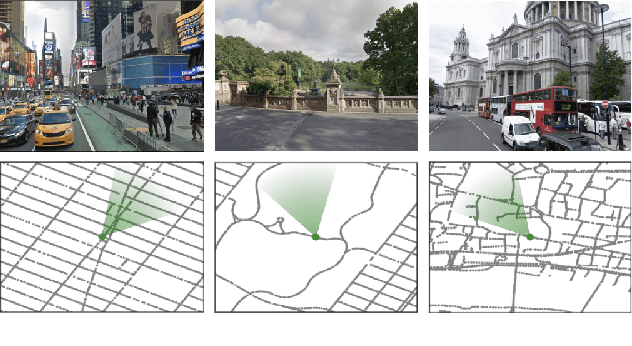
Navigation is a rich and well-grounded problem domain that drives progress in many different areas of research: perception, planning, memory, exploration, and optimisation in particular. Historically these challenges have been separately considered and solutions built that rely on stationary datasets - for example, recorded trajectories through an environment. These datasets cannot be used for decision-making and reinforcement learning, however, and in general the perspective of navigation as an interactive learning task, where the actions and behaviours of a learning agent are learned simultaneously with the perception and planning, is relatively unsupported. Thus, existing navigation benchmarks generally rely on static datasets (Geiger et al., 2013; Kendall et al., 2015) or simulators (Beattie et al., 2016; Shah et al., 2018). To support and validate research in end-to-end navigation, we present StreetLearn: an interactive, first-person, partially-observed visual environment that uses Google Street View for its photographic content and broad coverage, and give performance baselines for a challenging goal-driven navigation task. The environment code, baseline agent code, and the dataset are available at http://streetlearn.cc
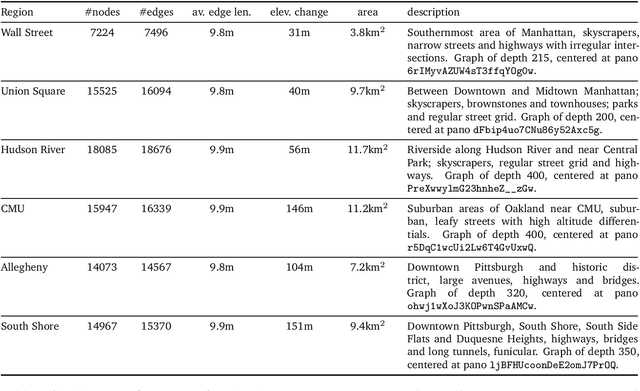
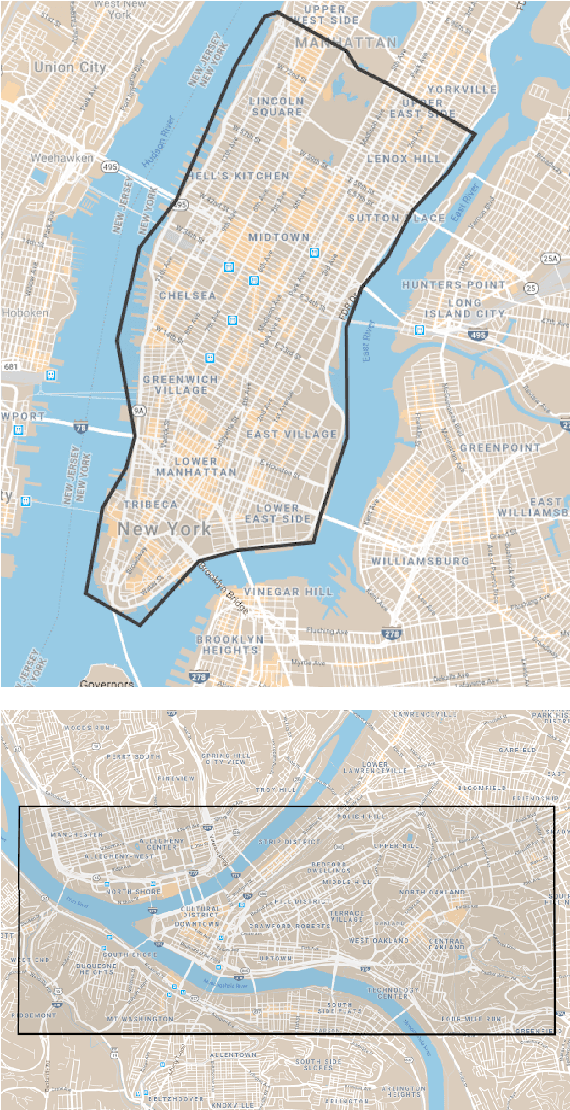
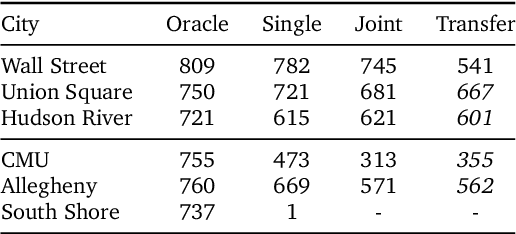
Learning To Follow Directions in Street View
Mar 01, 2019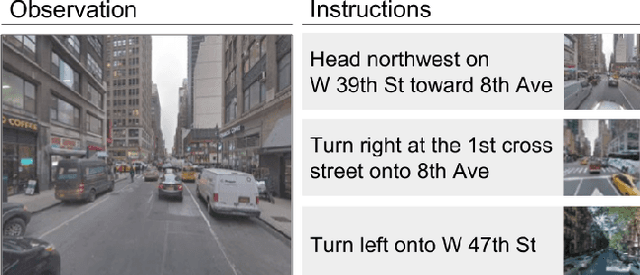
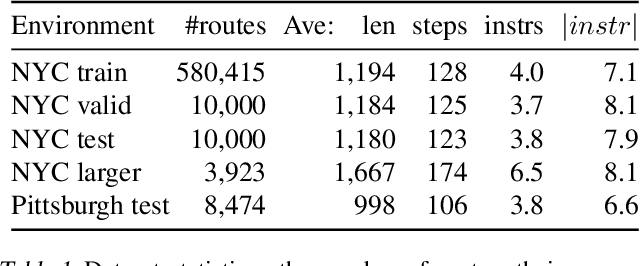
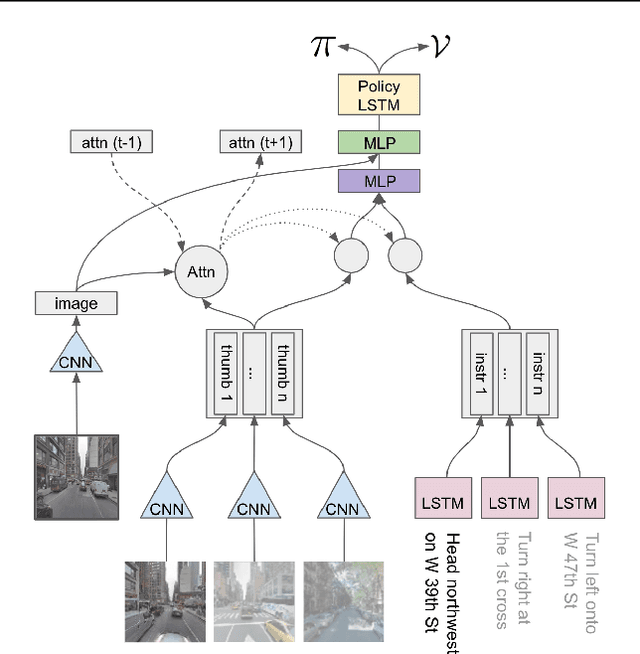
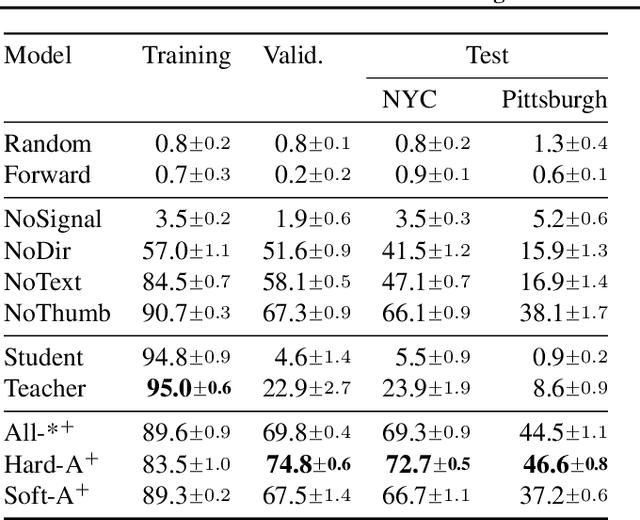
Navigating and understanding the real world remains a key challenge in machine learning and inspires a great variety of research in areas such as language grounding, planning, navigation and computer vision. We propose an instruction-following task that requires all of the above, and which combines the practicality of simulated environments with the challenges of ambiguous, noisy real world data. StreetNav is built on top of Google Street View and provides visually accurate environments representing real places. Agents are given driving instructions which they must learn to interpret in order to successfully navigate in this environment. Since humans equipped with driving instructions can readily navigate in previously unseen cities, we set a high bar and test our trained agents for similar cognitive capabilities. Although deep reinforcement learning (RL) methods are frequently evaluated only on data that closely follow the training distribution, our dataset extends to multiple cities and has a clean train/test separation. This allows for thorough testing of generalisation ability. This paper presents the StreetNav environment and tasks, a set of novel models that establish strong baselines, and analysis of the task and the trained agents.