 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLukas Bernreiter
PHASER: a Robust and Correspondence-free Global Pointcloud Registration
Feb 03, 2021
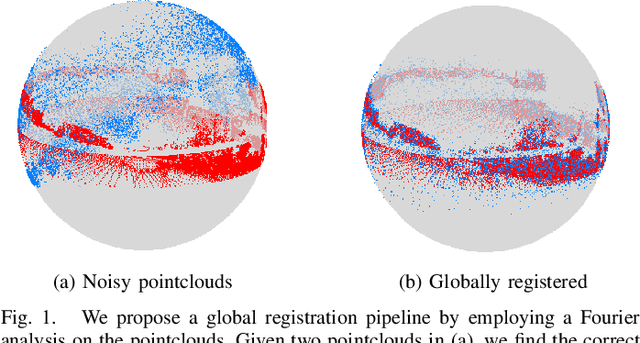
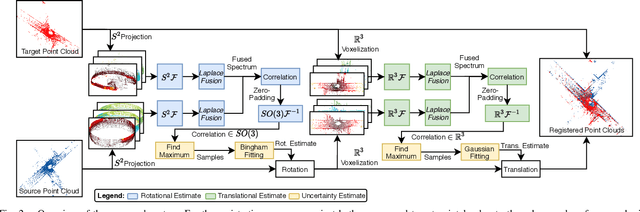
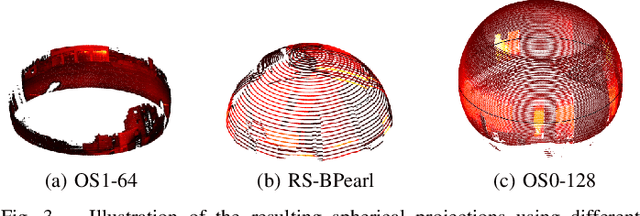
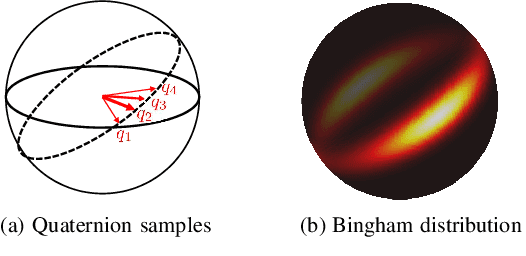
We propose PHASER, a correspondence-free global registration of sensor-centric pointclouds that is robust to noise, sparsity, and partial overlaps. Our method can seamlessly handle multimodal information and does not rely on keypoint nor descriptor preprocessing modules. By exploiting properties of Fourier analysis, PHASER operates directly on the sensor's signal, fusing the spectra of multiple channels and computing the 6-DoF transformation based on correlation. Our registration pipeline starts by finding the most likely rotation followed by computing the most likely translation. Both estimates are distributed according to a probability distribution that takes the underlying manifold into account, i.e., a Bingham and Gaussian distribution, respectively. This further allows our approach to consider the periodic-nature of rotations and naturally represent its uncertainty. We extensively compare PHASER against several well-known registration algorithms on both simulated datasets, and real-world data acquired using different sensor configurations. Our results show that PHASER can globally align pointclouds in less than 100ms with an average accuracy of 2cm and 0.5deg, is resilient against noise, and can handle partial overlap.
Multiple Hypothesis Semantic Mapping for Robust Data Association
Dec 08, 2020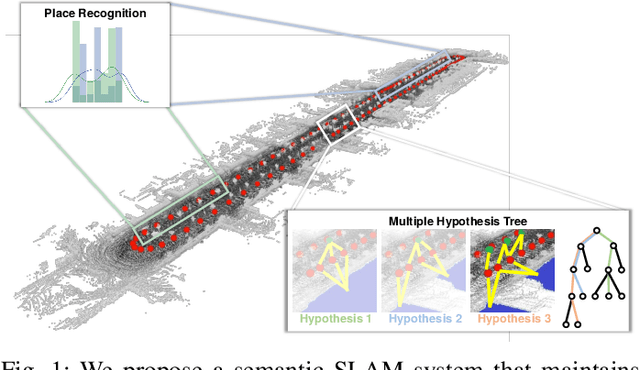
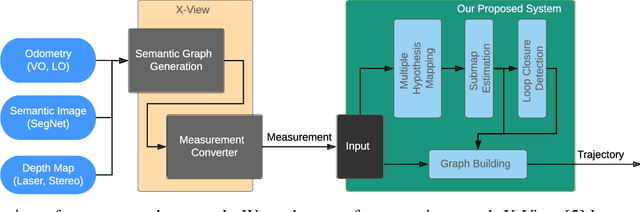
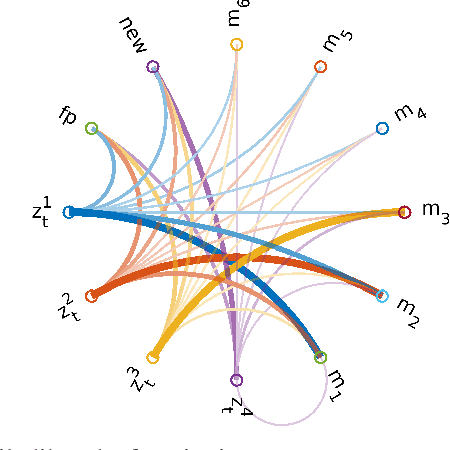
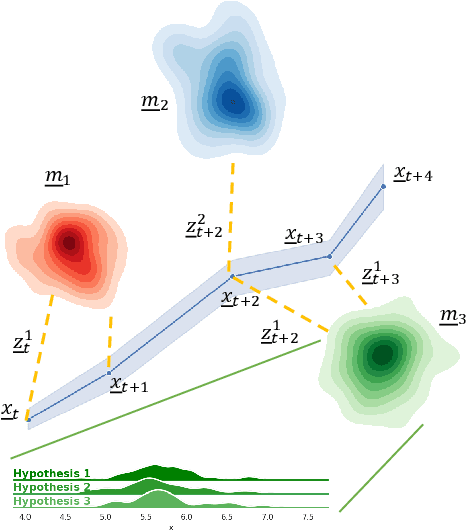
In this paper, we present a semantic mapping approach with multiple hypothesis tracking for data association. As semantic information has the potential to overcome ambiguity in measurements and place recognition, it forms an eminent modality for autonomous systems. This is particularly evident in urban scenarios with several similar looking surroundings. Nevertheless, it requires the handling of a non-Gaussian and discrete random variable coming from object detectors. Previous methods facilitate semantic information for global localization and data association to reduce the instance ambiguity between the landmarks. However, many of these approaches do not deal with the creation of complete globally consistent representations of the environment and typically do not scale well. We utilize multiple hypothesis trees to derive a probabilistic data association for semantic measurements by means of position, instance and class to create a semantic representation. We propose an optimized mapping method and make use of a pose graph to derive a novel semantic SLAM solution. Furthermore, we show that semantic covisibility graphs allow for a precise place recognition in urban environments. We verify our approach using real-world outdoor dataset and demonstrate an average drift reduction of 33 % w.r.t. the raw odometry source. Moreover, our approach produces 55 % less hypotheses on average than a regular multiple hypotheses approach.
Fast and Accurate Mapping for Autonomous Racing
Mar 12, 2020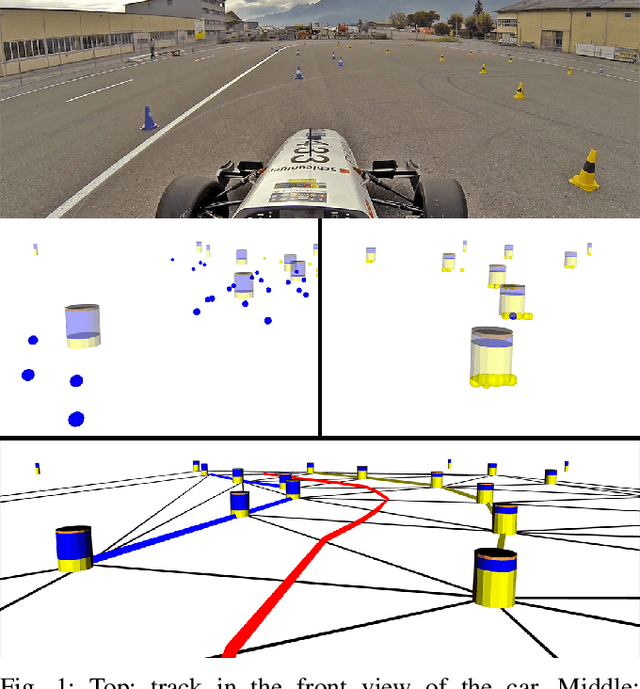
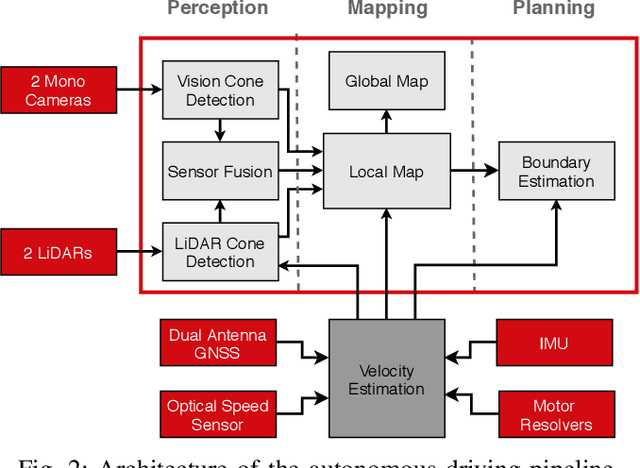
This paper presents the perception, mapping, and planning pipeline implemented on an autonomous race car. It was developed by the 2019 AMZ driverless team for the Formula Student Germany (FSG) 2019 driverless competition, where it won 1st place overall. The presented solution combines early fusion of camera and LiDAR data, a layered mapping approach, and a planning approach that uses Bayesian filtering to achieve high-speed driving on unknown race tracks while creating accurate maps. We benchmark the method against our team's previous solution, which won FSG 2018, and show improved accuracy when driving at the same speeds. Furthermore, the new pipeline makes it possible to reliably raise the maximum driving speed in unknown environments from 3~m/s to 12~m/s while still mapping with an acceptable RMSE of 0.29~m.
VersaVIS: An Open Versatile Multi-Camera Visual-Inertial Sensor Suite
Dec 05, 2019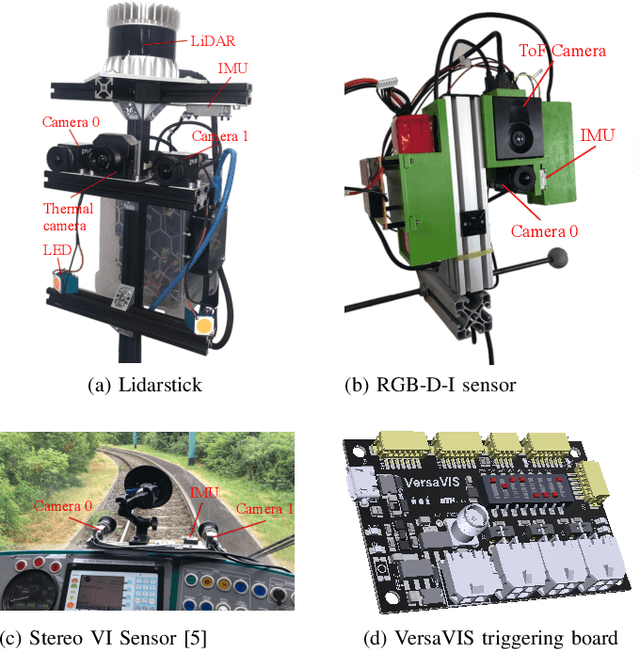
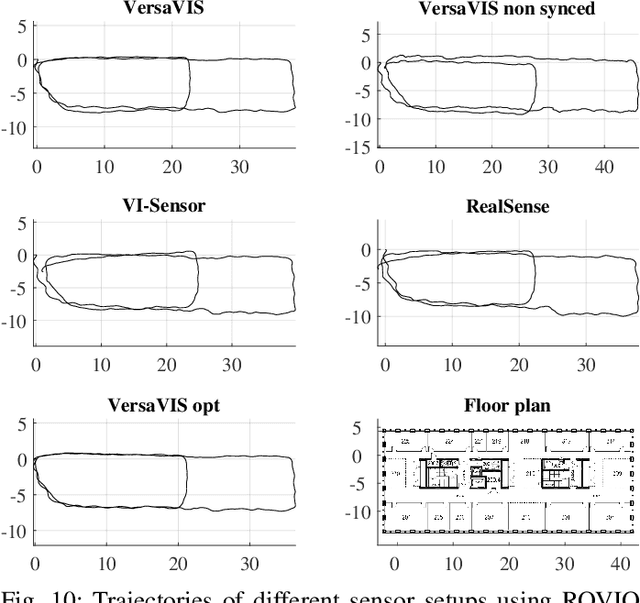
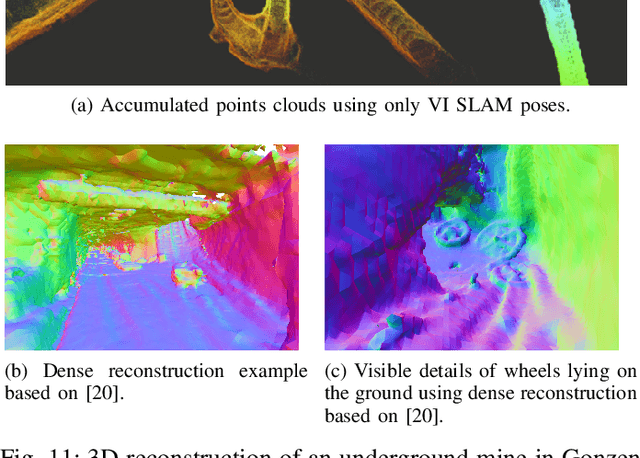
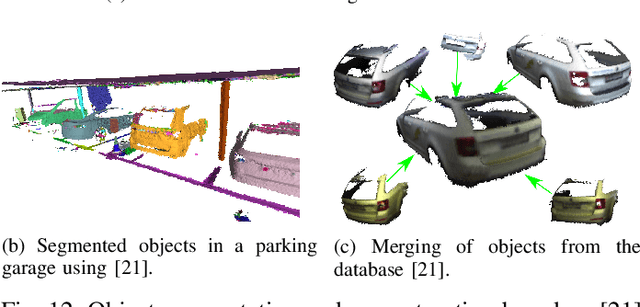
Robust and accurate pose estimation is crucial for many applications in mobile robotics. Extending visual Simultaneous Localization and Mapping (SLAM) with other modalities such as an inertial measurement unit (IMU) can boost robustness and accuracy. However, for a tight sensor fusion, accurate time synchronization of the sensors is often crucial. Changing exposure times, internal sensor filtering, multiple clock sources and unpredictable delays from operation system scheduling and data transfer can make sensor synchronization challenging. In this paper, we present VersaVIS, an Open Versatile Multi-Camera Visual-Inertial Sensor Suite aimed to be an efficient research platform for easy deployment, integration and extension for many mobile robotic applications. VersaVIS provides a complete, open-source hardware, firmware and software bundle to perform time synchronization of multiple cameras with an IMU featuring exposure compensation, host clock translation and independent and stereo camera triggering. The sensor suite supports a wide range of cameras and IMUs to match the requirements of the application. The synchronization accuracy of the framework is evaluated on multiple experiments achieving timing accuracy of less than 1 ms. Furthermore, the applicability and versatility of the sensor suite is demonstrated in multiple applications including visual-inertial SLAM, multi-camera applications, multimodal mapping, reconstruction and object based mapping.