 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTorque and velocity controllers to perform jumps with a humanoid robot: theory and implementation on the iCub robot
Jul 05, 2022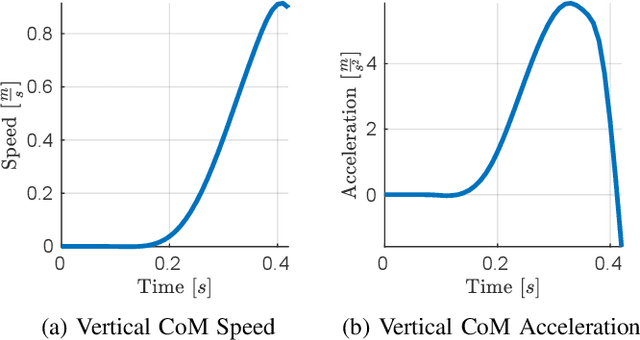
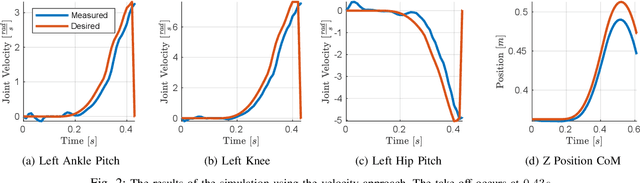
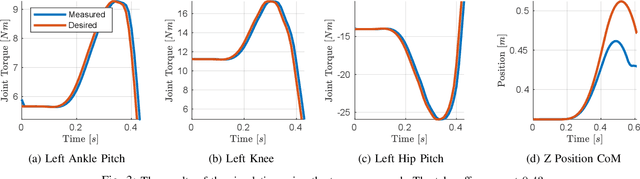
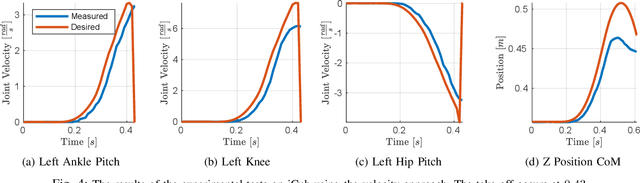
Jumping can be an effective way of locomotion to overcome small terrain gaps or obstacles. In this paper we propose two different approaches to perform jumps with a humanoid robot. Specifically, starting from a pre-defined CoM trajectory we develop the theory for a velocity controller and for a torque controller based on an optimization technique for the evaluation of the joints input. The controllers have been tested both in simulation and on the humanoid robot iCub. In simulation the robot was able to jump using both controllers, while the real system jumped with the velocity controller only. The results highlight the importance of controlling the centroidal angular momentum and they suggest that the joint performances, namely maximum power, of the legs and torso joints, and the low level control performances are fundamental to achieve acceptable results.
Modeling and Control of Morphing Covers for the Adaptive Morphology of Humanoid Robots
Jul 05, 2022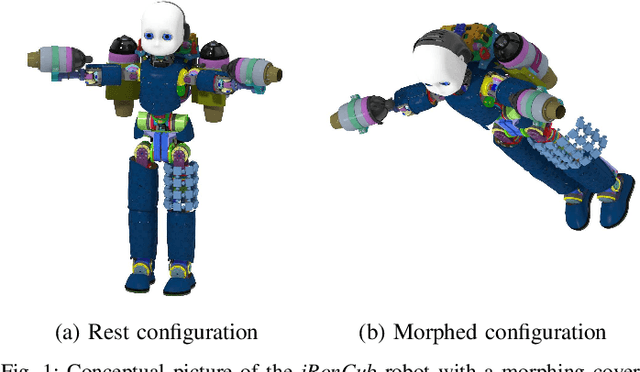
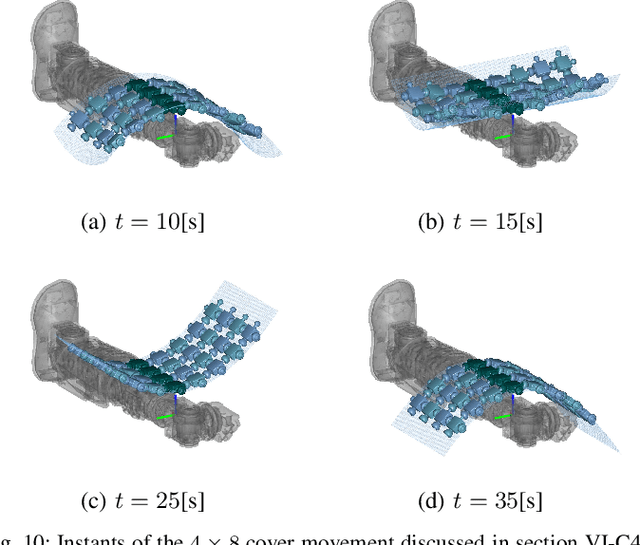
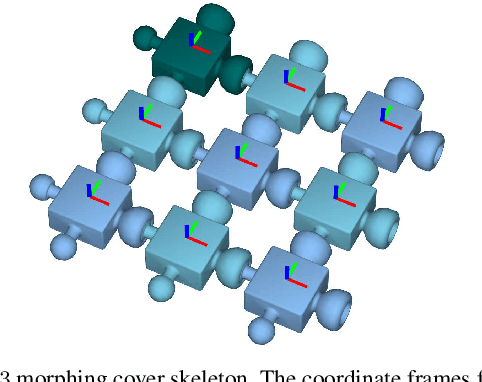
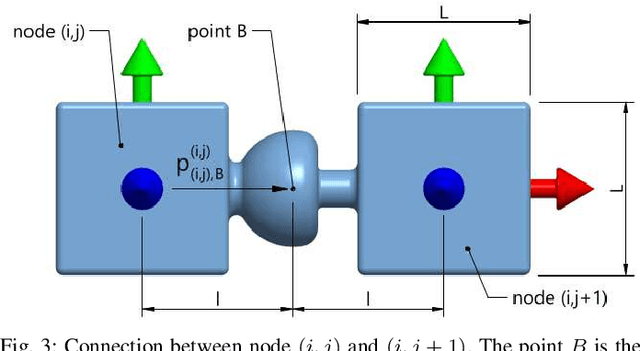
This article takes a step to provide humanoid robots with adaptive morphology abilities. We present a systematic approach for enabling robotic covers to morph their shape, with an overall size fitting the anthropometric dimensions of a humanoid robot. More precisely, we present a cover concept consisting of two main components: a skeleton, which is a repetition of a basic element called node, and a soft membrane, which encloses the cover and deforms with its motion. This article focuses on the cover skeleton and addresses the challenging problems of node design, system modeling, motor positioning, and control design of the morphing system. The cover modeling focuses on kinematics, and a systematic approach for defining the system kinematic constraints is presented. Then, we apply genetic algorithms to find the motor locations so that the morphing cover is fully actuated. Finally, we present control algorithms that allow the cover to morph into a time-varying shape. The entire approach is validated by performing kinematic simulations with four different covers of square dimensions and having 3x3, 4x8, 8x8, and 20x20 nodes, respectively. For each cover, we apply the genetic algorithms to choose the motor locations and perform simulations for tracking a desired shape. The simulation results show that the presented approach ensures the covers to track a desired shape with good tracking performances.
Modeling, Identification and Control of Model Jet Engines for Jet Powered Robotics
Sep 29, 2019



The paper contributes towards the modeling, identification, and control of model jet engines. We propose a nonlinear, second order model in order to capture the model jet engines governing dynamics. The model structure is identified by applying sparse identification of nonlinear dynamics, and then the parameters of the model are found via gray-box identification procedures. Once the model has been identified, we approached the control of the model jet engine by designing two control laws. The first one is based on the classical Feedback Linearization technique while the second one on the Sliding Mode control. The overall methodology has been verified by modeling, identifying and controlling two model jet engines, i.e. P100-RX and P220-RXi developed by JetCat, which provide a maximum thrust of 100 N and 220 N, respectively.
A Control Architecture with Online Predictive Planning for Position and Torque Controlled Walking of Humanoid Robots
Jul 14, 2018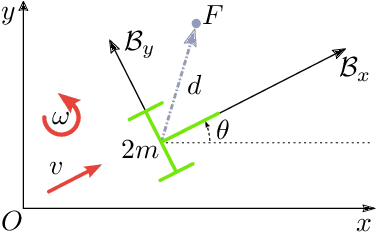
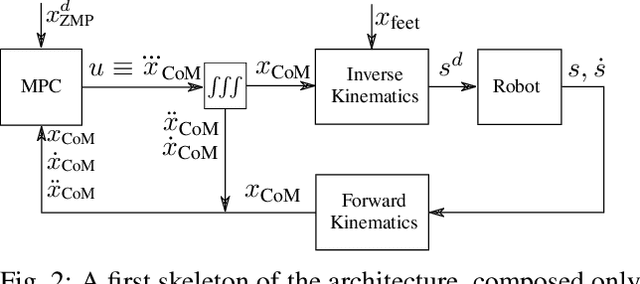
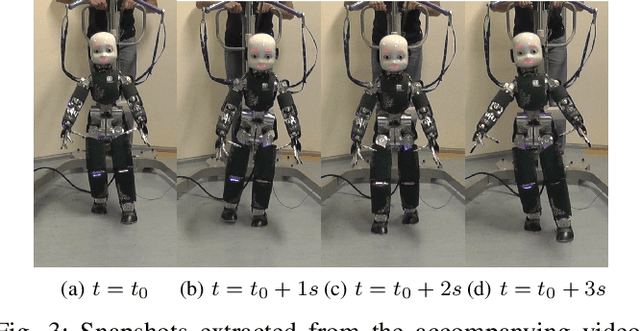
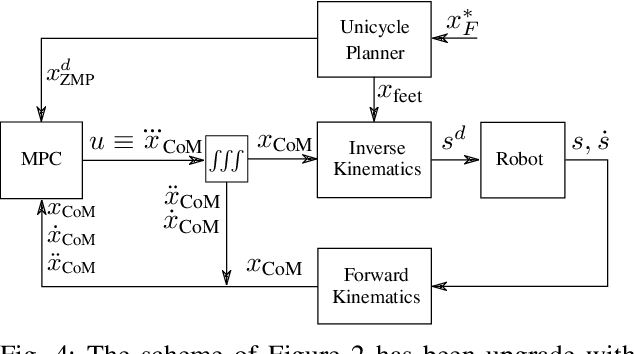
A common approach to the generation of walking patterns for humanoid robots consists in adopting a layered control architecture. This paper proposes an architecture composed of three nested control loops. The outer loop exploits a robot kinematic model to plan the footstep positions. In the mid layer, a predictive controller generates a Center of Mass trajectory according to the well-known table-cart model. Through a whole-body inverse kinematics algorithm, we can define joint references for position controlled walking. The outcomes of these two loops are then interpreted as inputs of a stack-of-task QP-based torque controller, which represents the inner loop of the presented control architecture. This resulting architecture allows the robot to walk also in torque control, guaranteeing higher level of compliance. Real world experiments have been carried on the humanoid robot iCub.
Walking on Partial Footholds Including Line Contacts with the Humanoid Robot Atlas
Jan 12, 2017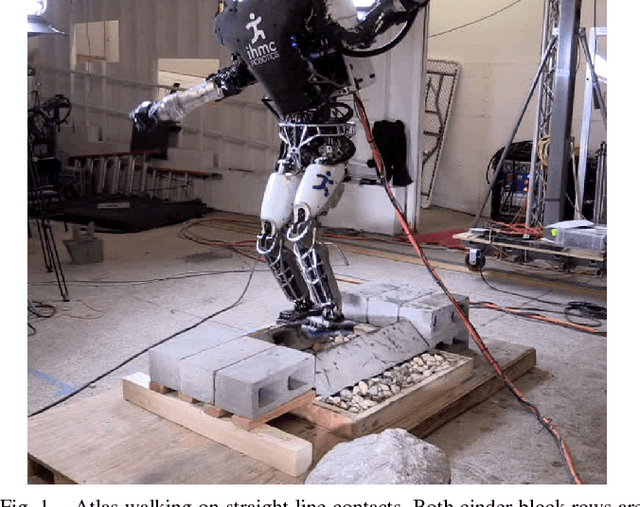

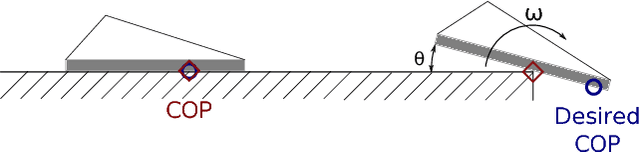
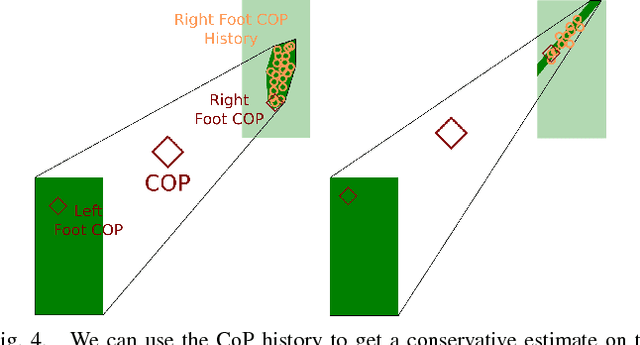
We present a method for humanoid robot walking on partial footholds such as small stepping stones and rocks with sharp surfaces. Our algorithm does not rely on prior knowledge of the foothold, but information about an expected foothold can be used to improve the stepping performance. After a step is taken, the robot explores the new contact surface by attempting to shift the center of pressure around the foot. The available foothold is inferred by the way in which the foot rotates about contact edges and/or by the achieved center of pressure locations on the foot during exploration. This estimated contact area is then used by a whole body momentum-based control algorithm. To walk and balance on partial footholds, we combine fast, dynamic stepping with the use of upper body angular momentum to regain balance. We applied this method to the Atlas humanoid designed by Boston Dynamics to walk over small contact surfaces, such as line and point contacts. We present experimental results and discuss performance limitations.