 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFill the GAP: A Granular Alignment Paradigm for Visual Reasoning in Multimodal Large Language Models
May 12, 2026Visual latent reasoning lets a multimodal large language model (MLLM) create intermediate visual evidence as continuous tokens, avoiding external tools or image generators. However, existing methods usually follow an output-as-input latent paradigm and yield unstable gains. We identify evidence for a feature-space mismatch that can contribute to this instability: dominant visual-latent models build on pre-norm MLLMs and reuse decoder hidden states as predicted latent inputs, even though these states occupy a substantially different norm regime from the input embeddings the model was trained to consume~\citep{xie2025mhc,li2026siamesenorm,team2026attention}. This mismatch can make direct latent feedback unreliable. Motivated by this diagnosis, we propose \textbf{GAP}, a \textbf{G}ranular \textbf{A}lignment \textbf{P}aradigm for visual latent modeling. GAP aligns visual latent reasoning at three levels: feature-level alignment maps decoder outputs into input-compatible visual latents through a lightweight PCA-aligned latent head; context-level alignment grounds latent targets with inspectable auxiliary visual supervision; and capacity-guided alignment assigns latent supervision selectively to examples where the base MLLM struggles. On Qwen2.5-VL 7B, the resulting model achieves the best mean aggregate perception and reasoning performance among our supervised variants. Inference-time intervention probing further suggests that generated latents provide task-relevant visual signal beyond merely adding token slots.
Periodic Steady-State Control of a Handkerchief-Spinning Task Using a Parallel Anti-Parallelogram Tendon-driven Wrist
Apr 20, 2026Spinning flexible objects, exemplified by traditional Chinese handkerchief performances, demands periodic steady-state motions under nonlinear dynamics with frictional contacts and boundary constraints. To address these challenges, we first design an intuitive dexterous wrist based on a parallel anti-parallelogram tendon-driven structure, which achieves 90 degrees omnidirectional rotation with low inertia and decoupled roll-pitch sensing, and implement a high-low level hierarchical control scheme. We then develop a particle-spring model of the handkerchief for control-oriented abstraction and strategy evaluation. Hardware experiments validate this framework, achieving an unfolding ratio of approximately 99% and fingertip tracking error of RMSE = 2.88 mm in high-dynamic spinning. These results demonstrate that integrating control-oriented modeling with a task-tailored dexterous wrist enables robust rest-to-steady-state transitions and precise periodic manipulation of highly flexible objects. More visualizations: https://slowly1113.github.io/icra2026-handkerchief/
FLAC: Maximum Entropy RL via Kinetic Energy Regularized Bridge Matching
Feb 13, 2026Iterative generative policies, such as diffusion models and flow matching, offer superior expressivity for continuous control but complicate Maximum Entropy Reinforcement Learning because their action log-densities are not directly accessible. To address this, we propose Field Least-Energy Actor-Critic (FLAC), a likelihood-free framework that regulates policy stochasticity by penalizing the kinetic energy of the velocity field. Our key insight is to formulate policy optimization as a Generalized Schrödinger Bridge (GSB) problem relative to a high-entropy reference process (e.g., uniform). Under this view, the maximum-entropy principle emerges naturally as staying close to a high-entropy reference while optimizing return, without requiring explicit action densities. In this framework, kinetic energy serves as a physically grounded proxy for divergence from the reference: minimizing path-space energy bounds the deviation of the induced terminal action distribution. Building on this view, we derive an energy-regularized policy iteration scheme and a practical off-policy algorithm that automatically tunes the kinetic energy via a Lagrangian dual mechanism. Empirically, FLAC achieves superior or comparable performance on high-dimensional benchmarks relative to strong baselines, while avoiding explicit density estimation.
Flow-Based Policy for Online Reinforcement Learning
Jun 15, 2025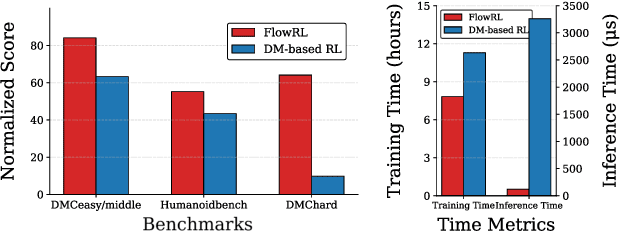



We present \textbf{FlowRL}, a novel framework for online reinforcement learning that integrates flow-based policy representation with Wasserstein-2-regularized optimization. We argue that in addition to training signals, enhancing the expressiveness of the policy class is crucial for the performance gains in RL. Flow-based generative models offer such potential, excelling at capturing complex, multimodal action distributions. However, their direct application in online RL is challenging due to a fundamental objective mismatch: standard flow training optimizes for static data imitation, while RL requires value-based policy optimization through a dynamic buffer, leading to difficult optimization landscapes. FlowRL first models policies via a state-dependent velocity field, generating actions through deterministic ODE integration from noise. We derive a constrained policy search objective that jointly maximizes Q through the flow policy while bounding the Wasserstein-2 distance to a behavior-optimal policy implicitly derived from the replay buffer. This formulation effectively aligns the flow optimization with the RL objective, enabling efficient and value-aware policy learning despite the complexity of the policy class. Empirical evaluations on DMControl and Humanoidbench demonstrate that FlowRL achieves competitive performance in online reinforcement learning benchmarks.
Multi-segment Soft Robot Control via Deep Koopman-based Model Predictive Control
May 01, 2025Soft robots, compared to regular rigid robots, as their multiple segments with soft materials bring flexibility and compliance, have the advantages of safe interaction and dexterous operation in the environment. However, due to its characteristics of high dimensional, nonlinearity, time-varying nature, and infinite degree of freedom, it has been challenges in achieving precise and dynamic control such as trajectory tracking and position reaching. To address these challenges, we propose a framework of Deep Koopman-based Model Predictive Control (DK-MPC) for handling multi-segment soft robots. We first employ a deep learning approach with sampling data to approximate the Koopman operator, which therefore linearizes the high-dimensional nonlinear dynamics of the soft robots into a finite-dimensional linear representation. Secondly, this linearized model is utilized within a model predictive control framework to compute optimal control inputs that minimize the tracking error between the desired and actual state trajectories. The real-world experiments on the soft robot "Chordata" demonstrate that DK-MPC could achieve high-precision control, showing the potential of DK-MPC for future applications to soft robots.
Model-based Constrained MDP for Budget Allocation in Sequential Incentive Marketing
Mar 02, 2023



Sequential incentive marketing is an important approach for online businesses to acquire customers, increase loyalty and boost sales. How to effectively allocate the incentives so as to maximize the return (e.g., business objectives) under the budget constraint, however, is less studied in the literature. This problem is technically challenging due to the facts that 1) the allocation strategy has to be learned using historically logged data, which is counterfactual in nature, and 2) both the optimality and feasibility (i.e., that cost cannot exceed budget) needs to be assessed before being deployed to online systems. In this paper, we formulate the problem as a constrained Markov decision process (CMDP). To solve the CMDP problem with logged counterfactual data, we propose an efficient learning algorithm which combines bisection search and model-based planning. First, the CMDP is converted into its dual using Lagrangian relaxation, which is proved to be monotonic with respect to the dual variable. Furthermore, we show that the dual problem can be solved by policy learning, with the optimal dual variable being found efficiently via bisection search (i.e., by taking advantage of the monotonicity). Lastly, we show that model-based planing can be used to effectively accelerate the joint optimization process without retraining the policy for every dual variable. Empirical results on synthetic and real marketing datasets confirm the effectiveness of our methods.
Prior-Enhanced Few-Shot Segmentation with Meta-Prototypes
Jun 01, 2021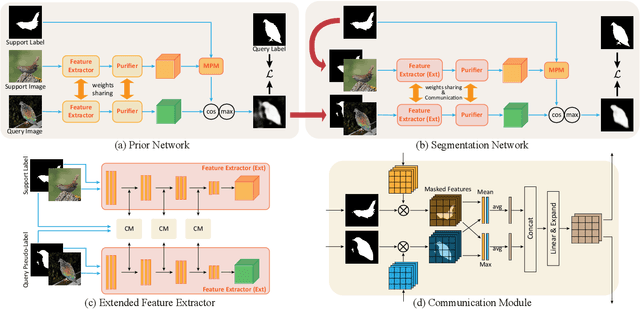
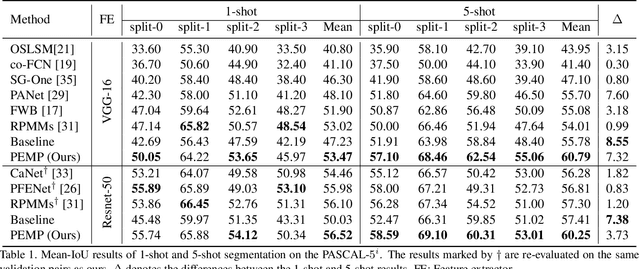
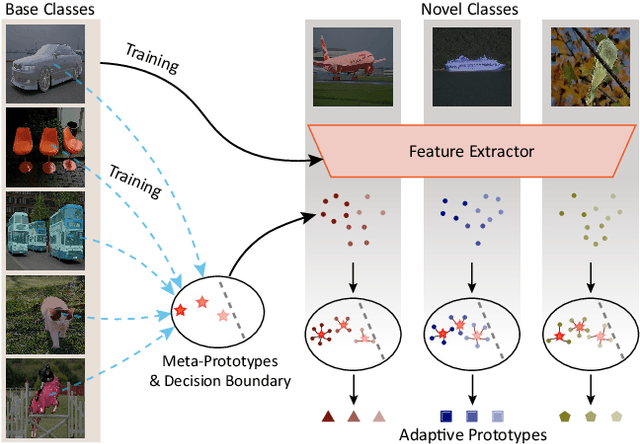
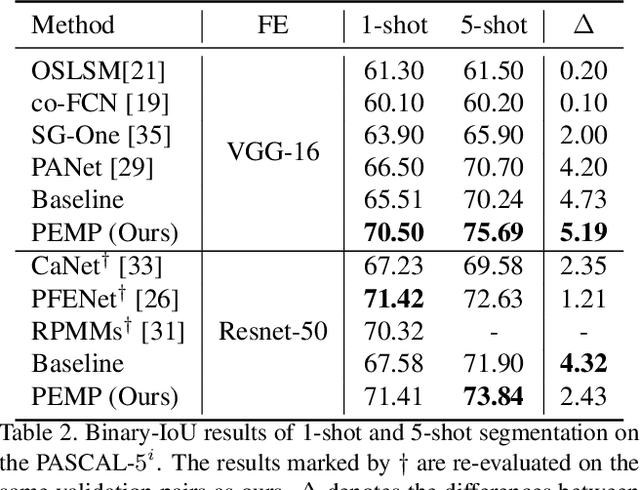
Few-shot segmentation~(FSS) performance has been extensively promoted by introducing episodic training and class-wise prototypes. However, the FSS problem remains challenging due to three limitations: (1) Models are distracted by task-unrelated information; (2) The representation ability of a single prototype is limited; (3) Class-related prototypes ignore the prior knowledge of base classes. We propose the Prior-Enhanced network with Meta-Prototypes to tackle these limitations. The prior-enhanced network leverages the support and query (pseudo-) labels in feature extraction, which guides the model to focus on the task-related features of the foreground objects, and suppress much noise due to the lack of supervised knowledge. Moreover, we introduce multiple meta-prototypes to encode hierarchical features and learn class-agnostic structural information. The hierarchical features help the model highlight the decision boundary and focus on hard pixels, and the structural information learned from base classes is treated as the prior knowledge for novel classes. Experiments show that our method achieves the mean-IoU scores of 60.79% and 41.16% on PASCAL-$5^i$ and COCO-$20^i$, outperforming the state-of-the-art method by 3.49% and 5.64% in the 5-shot setting. Moreover, comparing with 1-shot results, our method promotes 5-shot accuracy by 3.73% and 10.32% on the above two benchmarks. The source code of our method is available at https://github.com/Jarvis73/PEMP.