 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong-Term Feature Banks for Detailed Video Understanding
Dec 12, 2018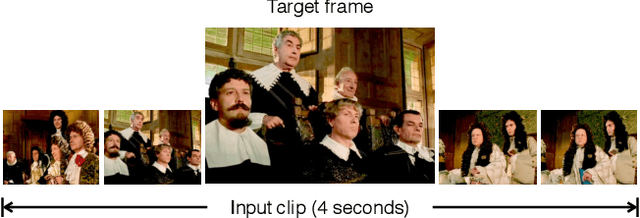
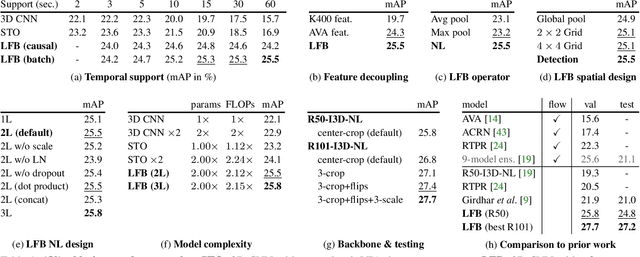

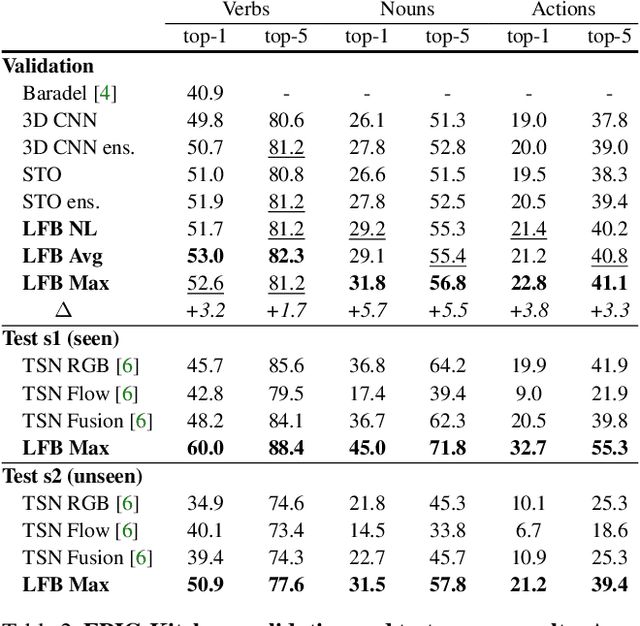
To understand the world, we humans constantly need to relate the present to the past, and put events in context. In this paper, we enable existing video models to do the same. We propose a long-term feature bank---supportive information extracted over the entire span of a video---to augment state-of-the-art video models that otherwise would only view short clips of 2-5 seconds. Our experiments demonstrate that augmenting 3D convolutional networks with a long-term feature bank yields state-of-the-art results on three challenging video datasets: AVA, EPIC-Kitchens, and Charades.
SlowFast Networks for Video Recognition
Dec 10, 2018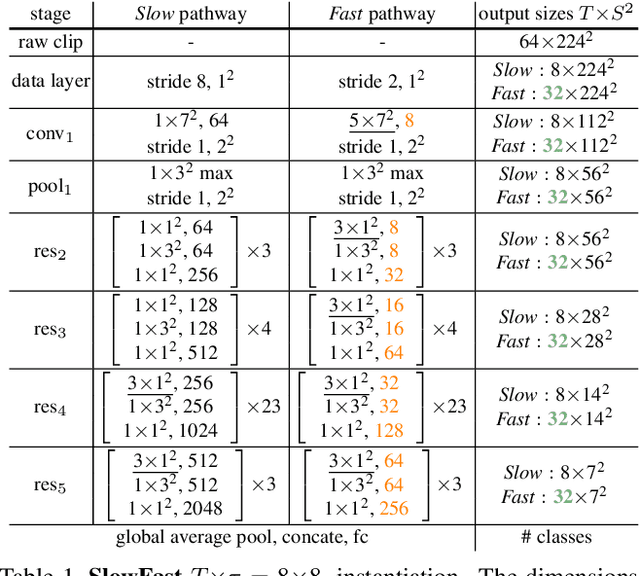
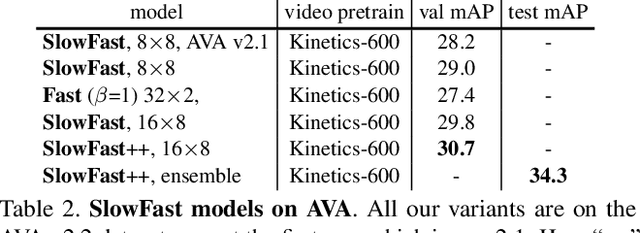
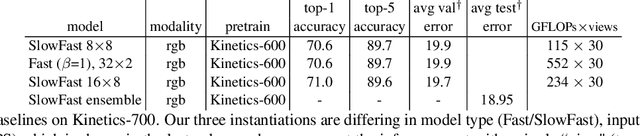
We present SlowFast networks for video recognition. Our model involves (i) a Slow pathway, operating at low frame rate, to capture spatial semantics, and (ii) a Fast pathway, operating at high frame rate, to capture motion at fine temporal resolution. The Fast pathway can be made very lightweight by reducing its channel capacity, yet can learn useful temporal information for video recognition. Our models achieve strong performance for both action classification and detection in video, and large improvements are pin-pointed as contributions by our SlowFast concept. We report 79.0% accuracy on the Kinetics dataset without using any pre-training, largely surpassing the previous best results of this kind. On AVA action detection we achieve a new state-of-the-art of 28.3 mAP. Code will be made publicly available.
Feature Denoising for Improving Adversarial Robustness
Dec 09, 2018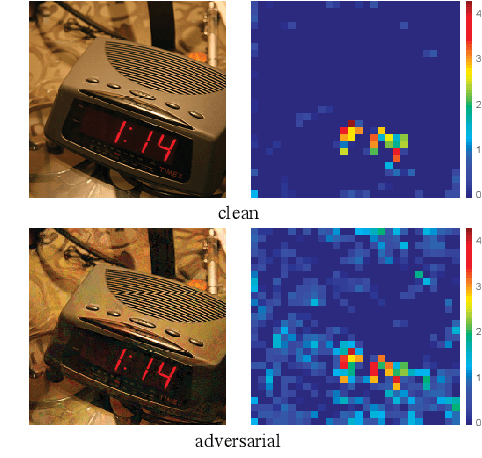
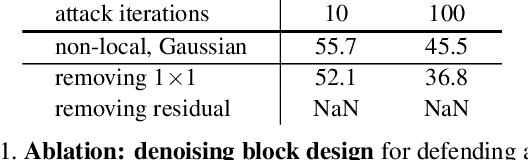
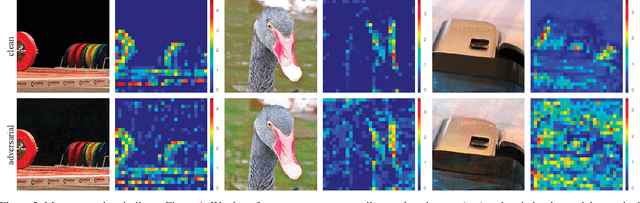
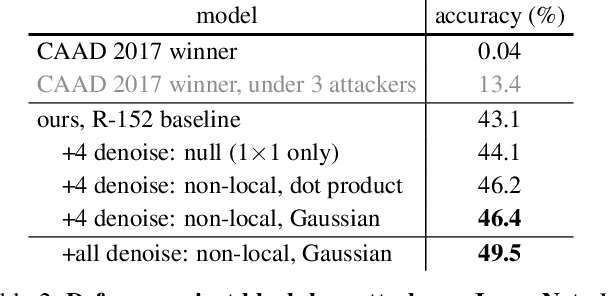
Adversarial attacks to image classification systems present challenges to convolutional networks and opportunities for understanding them. This study suggests that adversarial perturbations on images lead to noise in the features constructed by these networks. Motivated by this observation, we develop new network architectures that increase adversarial robustness by performing feature denoising. Specifically, our networks contain blocks that denoise the features using non-local means or other filters; the entire networks are trained end-to-end. When combined with adversarial training, our feature denoising networks substantially improve the state-of-the-art in adversarial robustness in both white-box and black-box attack settings. On ImageNet, under 10-iteration PGD white-box attacks where prior art has 27.9% accuracy, our method achieves 55.7%; even under extreme 2000-iteration PGD white-box attacks, our method secures 42.6% accuracy. A network based on our method was ranked first in Competition on Adversarial Attacks and Defenses (CAAD) 2018 --- it achieved 50.6% classification accuracy on a secret, ImageNet-like test dataset against 48 unknown attackers, surpassing the runner-up approach by ~10%. Code and models will be made publicly available.
Rethinking ImageNet Pre-training
Nov 21, 2018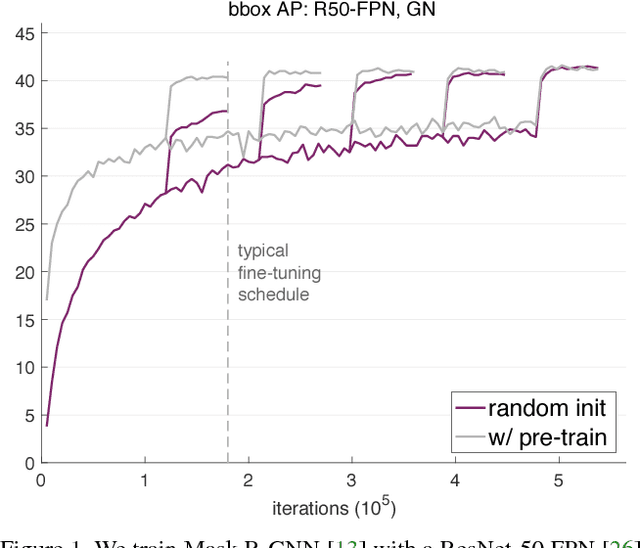
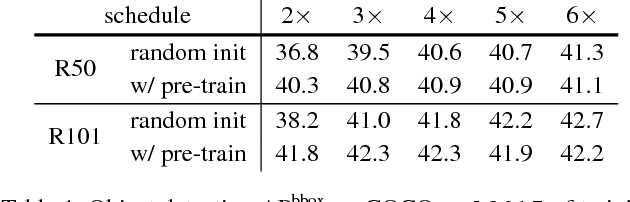
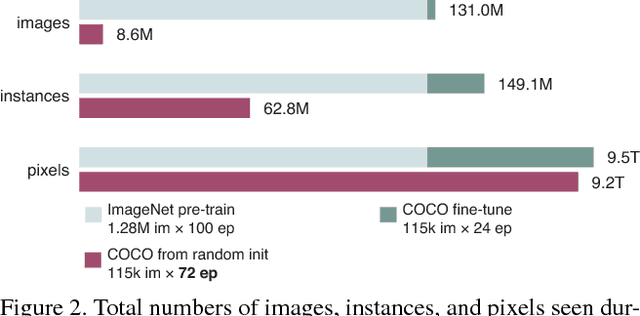
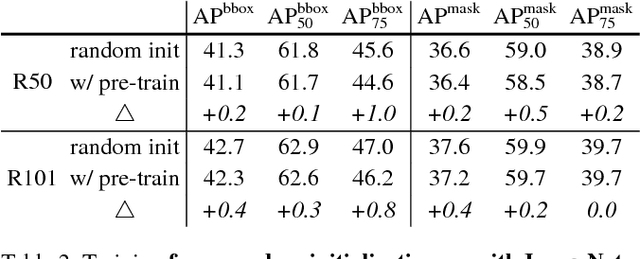
We report competitive results on object detection and instance segmentation on the COCO dataset using standard models trained from random initialization. The results are no worse than their ImageNet pre-training counterparts even when using the hyper-parameters of the baseline system (Mask R-CNN) that were optimized for fine-tuning pre-trained models, with the sole exception of increasing the number of training iterations so the randomly initialized models may converge. Training from random initialization is surprisingly robust; our results hold even when: (i) using only 10% of the training data, (ii) for deeper and wider models, and (iii) for multiple tasks and metrics. Experiments show that ImageNet pre-training speeds up convergence early in training, but does not necessarily provide regularization or improve final target task accuracy. To push the envelope we demonstrate 50.9 AP on COCO object detection without using any external data---a result on par with the top COCO 2017 competition results that used ImageNet pre-training. These observations challenge the conventional wisdom of ImageNet pre-training for dependent tasks and we expect these discoveries will encourage people to rethink the current de facto paradigm of `pre-training and fine-tuning' in computer vision.
GLoMo: Unsupervisedly Learned Relational Graphs as Transferable Representations
Jul 02, 2018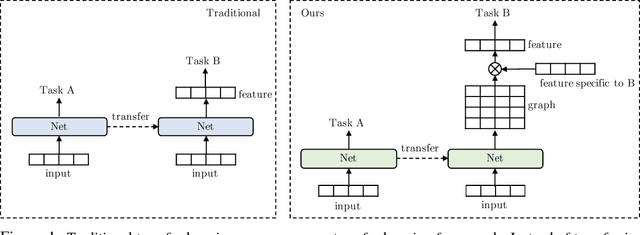
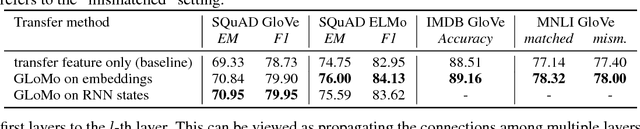
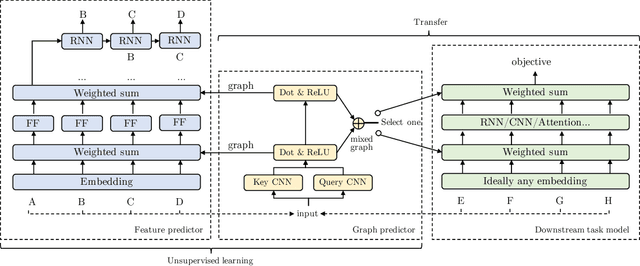
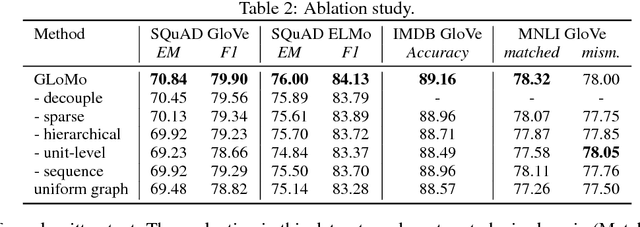
Modern deep transfer learning approaches have mainly focused on learning generic feature vectors from one task that are transferable to other tasks, such as word embeddings in language and pretrained convolutional features in vision. However, these approaches usually transfer unary features and largely ignore more structured graphical representations. This work explores the possibility of learning generic latent relational graphs that capture dependencies between pairs of data units (e.g., words or pixels) from large-scale unlabeled data and transferring the graphs to downstream tasks. Our proposed transfer learning framework improves performance on various tasks including question answering, natural language inference, sentiment analysis, and image classification. We also show that the learned graphs are generic enough to be transferred to different embeddings on which the graphs have not been trained (including GloVe embeddings, ELMo embeddings, and task-specific RNN hidden unit), or embedding-free units such as image pixels.
Group Normalization
Jun 11, 2018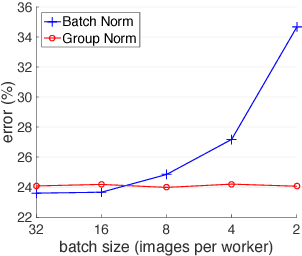

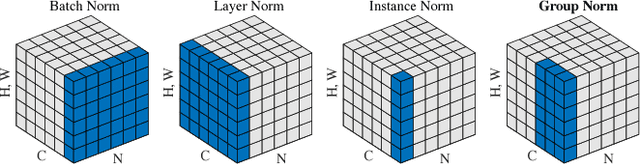

Batch Normalization (BN) is a milestone technique in the development of deep learning, enabling various networks to train. However, normalizing along the batch dimension introduces problems --- BN's error increases rapidly when the batch size becomes smaller, caused by inaccurate batch statistics estimation. This limits BN's usage for training larger models and transferring features to computer vision tasks including detection, segmentation, and video, which require small batches constrained by memory consumption. In this paper, we present Group Normalization (GN) as a simple alternative to BN. GN divides the channels into groups and computes within each group the mean and variance for normalization. GN's computation is independent of batch sizes, and its accuracy is stable in a wide range of batch sizes. On ResNet-50 trained in ImageNet, GN has 10.6% lower error than its BN counterpart when using a batch size of 2; when using typical batch sizes, GN is comparably good with BN and outperforms other normalization variants. Moreover, GN can be naturally transferred from pre-training to fine-tuning. GN can outperform its BN-based counterparts for object detection and segmentation in COCO, and for video classification in Kinetics, showing that GN can effectively replace the powerful BN in a variety of tasks. GN can be easily implemented by a few lines of code in modern libraries.
Exploring the Limits of Weakly Supervised Pretraining
May 02, 2018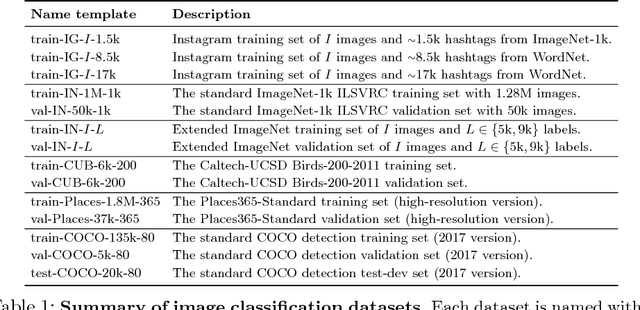
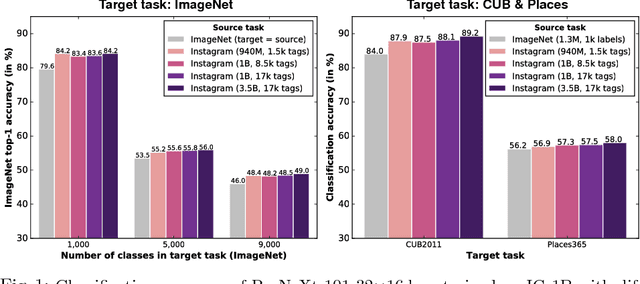
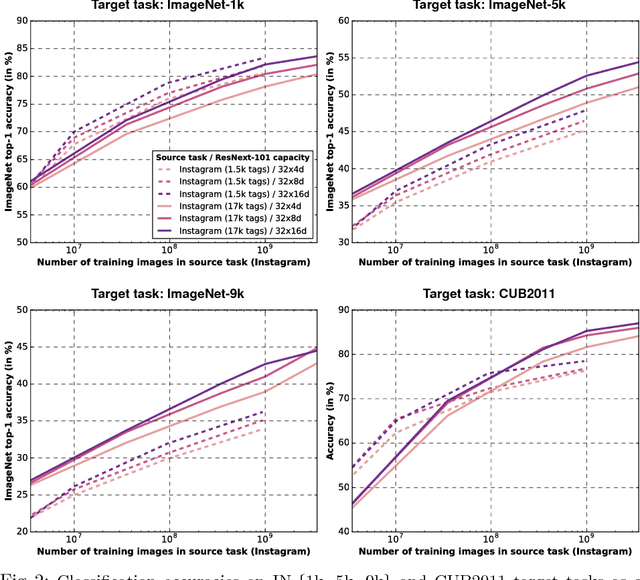
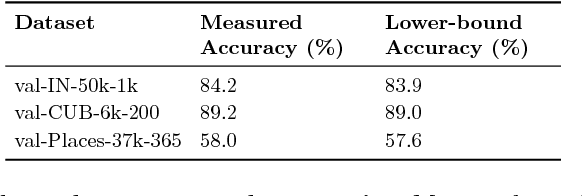
State-of-the-art visual perception models for a wide range of tasks rely on supervised pretraining. ImageNet classification is the de facto pretraining task for these models. Yet, ImageNet is now nearly ten years old and is by modern standards "small". Even so, relatively little is known about the behavior of pretraining with datasets that are multiple orders of magnitude larger. The reasons are obvious: such datasets are difficult to collect and annotate. In this paper, we present a unique study of transfer learning with large convolutional networks trained to predict hashtags on billions of social media images. Our experiments demonstrate that training for large-scale hashtag prediction leads to excellent results. We show improvements on several image classification and object detection tasks, and report the highest ImageNet-1k single-crop, top-1 accuracy to date: 85.4% (97.6% top-5). We also perform extensive experiments that provide novel empirical data on the relationship between large-scale pretraining and transfer learning performance.
Accurate, Large Minibatch SGD: Training ImageNet in 1 Hour
Apr 30, 2018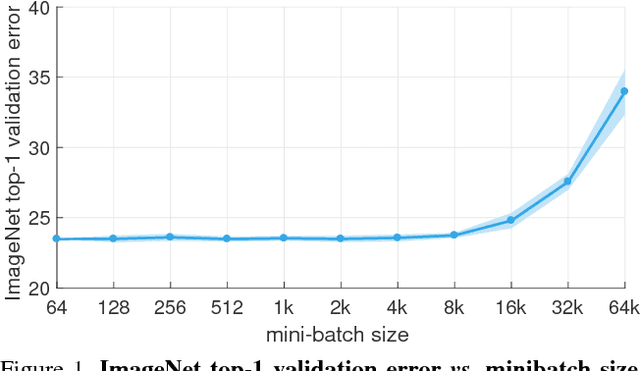
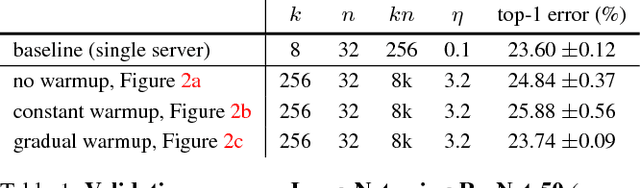
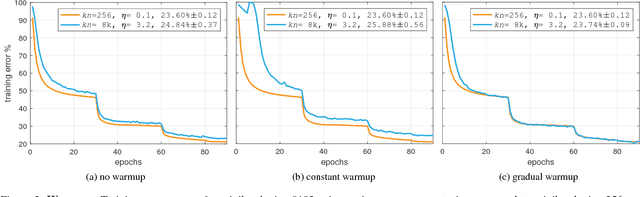
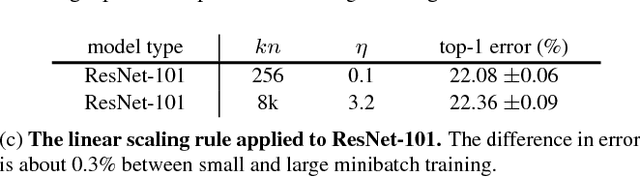
Deep learning thrives with large neural networks and large datasets. However, larger networks and larger datasets result in longer training times that impede research and development progress. Distributed synchronous SGD offers a potential solution to this problem by dividing SGD minibatches over a pool of parallel workers. Yet to make this scheme efficient, the per-worker workload must be large, which implies nontrivial growth in the SGD minibatch size. In this paper, we empirically show that on the ImageNet dataset large minibatches cause optimization difficulties, but when these are addressed the trained networks exhibit good generalization. Specifically, we show no loss of accuracy when training with large minibatch sizes up to 8192 images. To achieve this result, we adopt a hyper-parameter-free linear scaling rule for adjusting learning rates as a function of minibatch size and develop a new warmup scheme that overcomes optimization challenges early in training. With these simple techniques, our Caffe2-based system trains ResNet-50 with a minibatch size of 8192 on 256 GPUs in one hour, while matching small minibatch accuracy. Using commodity hardware, our implementation achieves ~90% scaling efficiency when moving from 8 to 256 GPUs. Our findings enable training visual recognition models on internet-scale data with high efficiency.
Panoptic Segmentation
Apr 14, 2018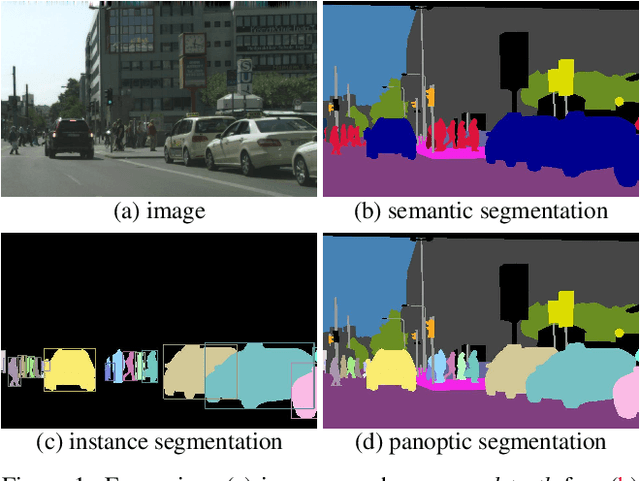
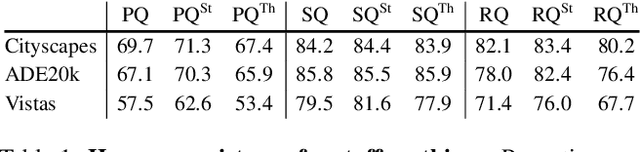
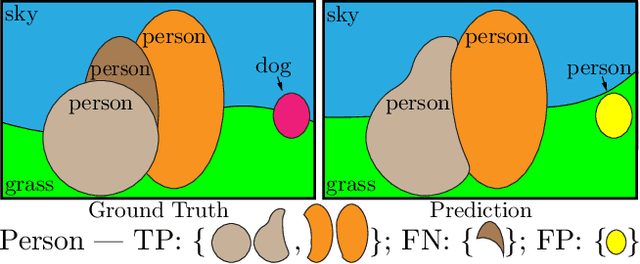

We propose and study a novel panoptic segmentation (PS) task. Panoptic segmentation unifies the typically distinct tasks of semantic segmentation (assign a class label to each pixel) and instance segmentation (detect and segment each object instance). The proposed task requires generating a coherent scene segmentation that is rich and complete, an important step toward real-world vision systems. While early work in computer vision addressed related image/scene parsing tasks, these are not currently popular, possibly due to lack of appropriate metrics or associated recognition challenges. To address this, we first propose a novel panoptic quality (PQ) metric that captures performance for all classes (stuff and things) in an interpretable and unified manner. Using the proposed metric, we perform a rigorous study of both human and machine performance for PS on three existing datasets, revealing interesting insights about the task. Second, we are working to introduce panoptic segmentation tracks at upcoming recognition challenges. The aim of our work is to revive the interest of the community in a more unified view of image segmentation.
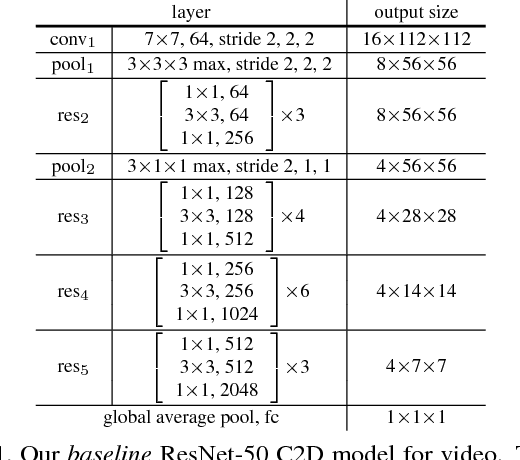
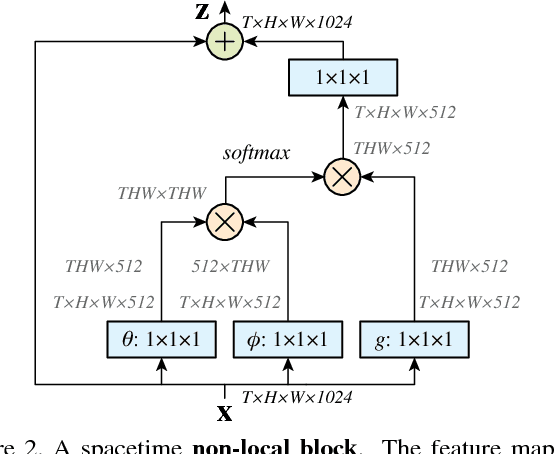
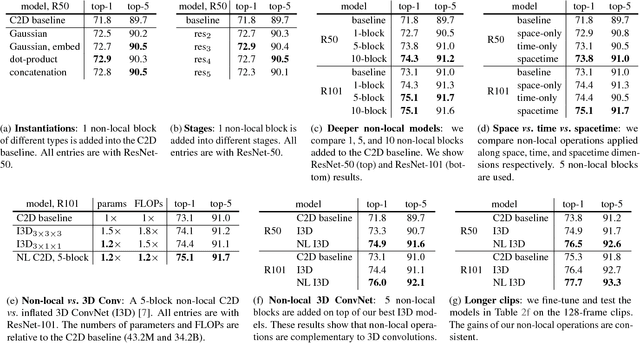
Non-local Neural Networks
Apr 13, 2018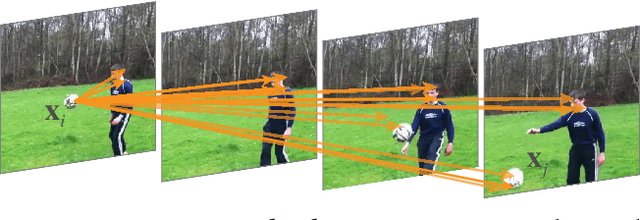
Both convolutional and recurrent operations are building blocks that process one local neighborhood at a time. In this paper, we present non-local operations as a generic family of building blocks for capturing long-range dependencies. Inspired by the classical non-local means method in computer vision, our non-local operation computes the response at a position as a weighted sum of the features at all positions. This building block can be plugged into many computer vision architectures. On the task of video classification, even without any bells and whistles, our non-local models can compete or outperform current competition winners on both Kinetics and Charades datasets. In static image recognition, our non-local models improve object detection/segmentation and pose estimation on the COCO suite of tasks. Code is available at https://github.com/facebookresearch/video-nonlocal-net .