 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic System Identification, and Control for a cost effective open-source VTOL MAV
Mar 09, 2017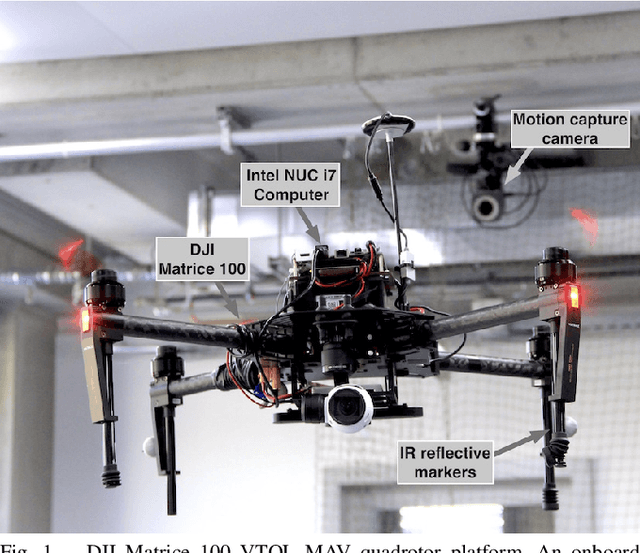
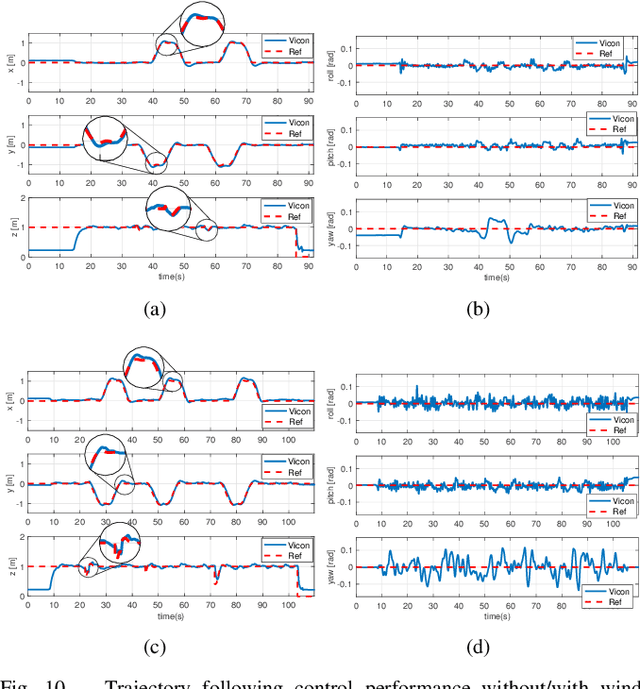
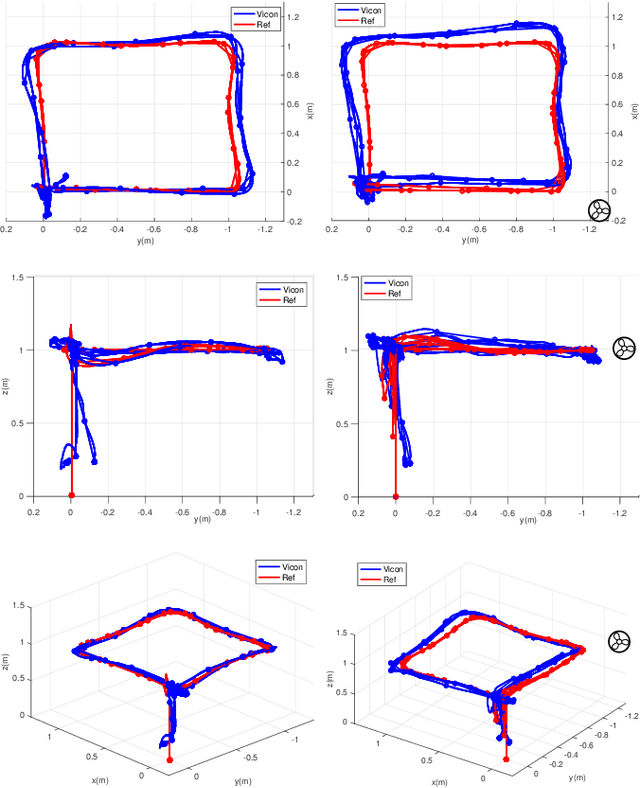
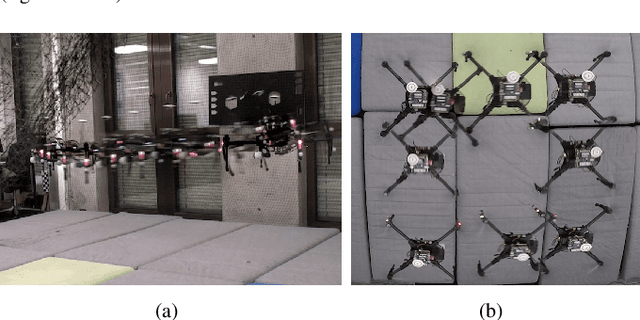
This paper describes dynamic system identification, and full control of a cost-effective vertical take-off and landing (VTOL) multi-rotor micro-aerial vehicle (MAV) --- DJI Matrice 100. The dynamics of the vehicle and autopilot controllers are identified using only a built-in IMU and utilized to design a subsequent model predictive controller (MPC). Experimental results for the control performance are evaluated using a motion capture system while performing hover, step responses, and trajectory following tasks in the present of external wind disturbances. We achieve root-mean-square (RMS) errors between the reference and actual trajectory of x=0.021m, y=0.016m, z=0.029m, roll=0.392deg, pitch=0.618deg, and yaw=1.087deg while performing hover. This paper also conveys the insights we have gained about the platform and returned to the community through open-source code, and documentation.
Multiresolution Mapping and Informative Path Planning for UAV-based Terrain Monitoring
Mar 08, 2017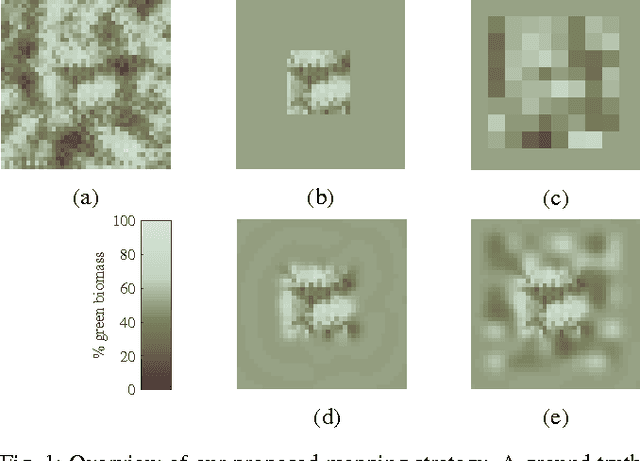
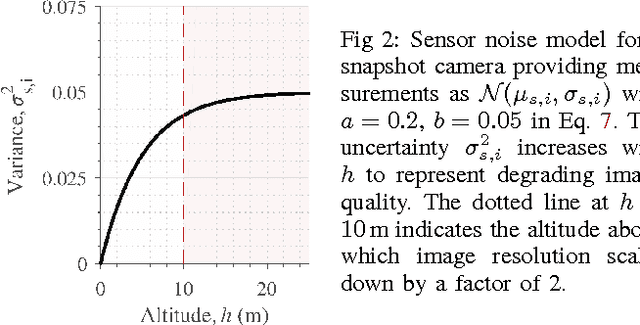
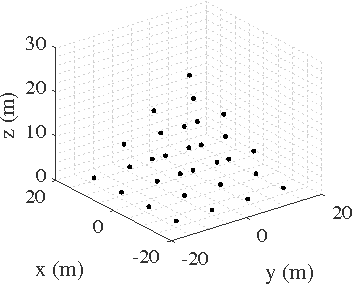
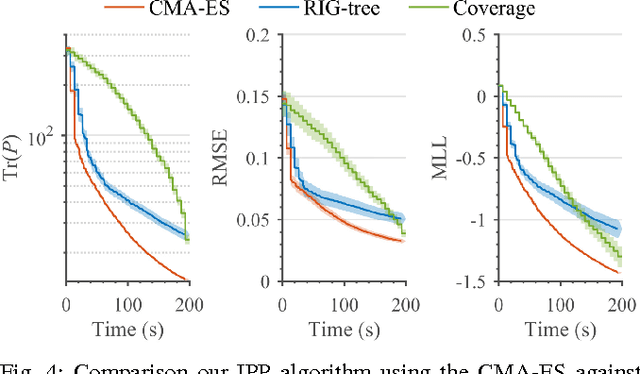
Unmanned aerial vehicles (UAVs) can offer timely and cost-effective delivery of high-quality sensing data. How- ever, deciding when and where to take measurements in complex environments remains an open challenge. To address this issue, we introduce a new multiresolution mapping approach for informative path planning in terrain monitoring using UAVs. Our strategy exploits the spatial correlation encoded in a Gaussian Process model as a prior for Bayesian data fusion with probabilistic sensors. This allows us to incorporate altitude-dependent sensor models for aerial imaging and perform constant-time measurement updates. The resulting maps are used to plan information-rich trajectories in continuous 3-D space through a combination of grid search and evolutionary optimization. We evaluate our framework on the application of agricultural biomass monitoring. Extensive simulations show that our planner performs better than existing methods, with mean error reductions of up to 45% compared to traditional "lawnmower" coverage. We demonstrate proof of concept using a multirotor to map color in different environments.
Nonlinear Model Predictive Control for Multi-Micro Aerial Vehicle Robust Collision Avoidance
Mar 03, 2017
Multiple multirotor Micro Aerial Vehicles sharing the same airspace require a reliable and robust collision avoidance technique. In this paper we address the problem of multi-MAV reactive collision avoidance. A model-based controller is employed to achieve simultaneously reference trajectory tracking and collision avoidance. Moreover, we also account for the uncertainty of the state estimator and the other agents position and velocity uncertainties to achieve a higher degree of robustness. The proposed approach is decentralized, does not require collision-free reference trajectory and accounts for the full MAV dynamics. We validated our approach in simulation and experimentally.
Sampling-based Motion Planning for Active Multirotor System Identification
Feb 05, 2017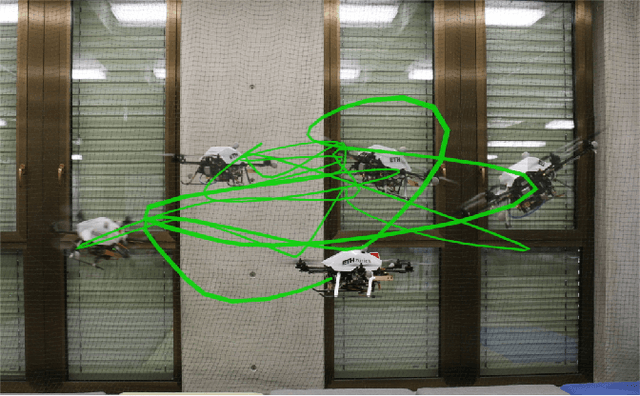
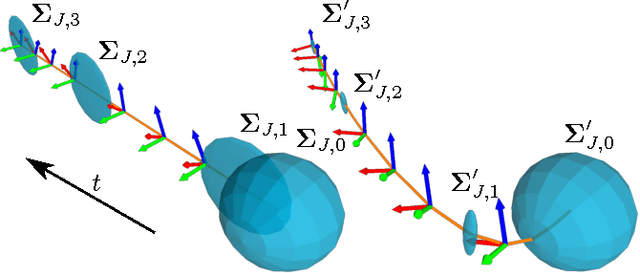
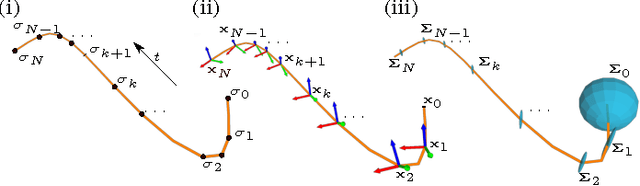
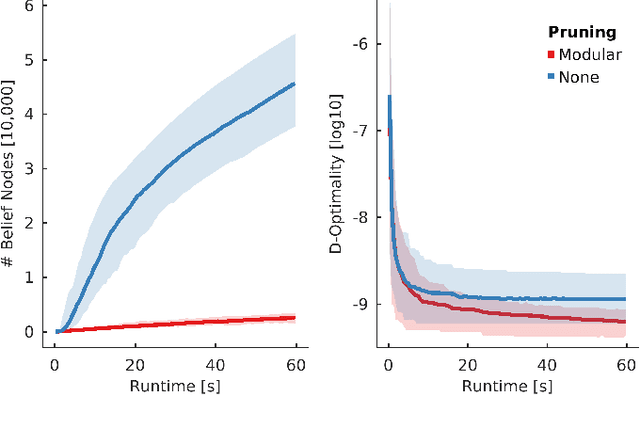
This paper reports on an algorithm for planning trajectories that allow a multirotor micro aerial vehicle (MAV) to quickly identify a set of unknown parameters. In many problems like self calibration or model parameter identification some states are only observable under a specific motion. These motions are often hard to find, especially for inexperienced users. Therefore, we consider system model identification in an active setting, where the vehicle autonomously decides what actions to take in order to quickly identify the model. Our algorithm approximates the belief dynamics of the system around a candidate trajectory using an extended Kalman filter (EKF). It uses sampling-based motion planning to explore the space of possible beliefs and find a maximally informative trajectory within a user-defined budget. We validate our method in simulation and on a real system showing the feasibility and repeatability of the proposed approach. Our planner creates trajectories which reduce model parameter convergence time and uncertainty by a factor of four.
Collaborative Object Transportation Using MAVs via Passive Force Control
Dec 15, 2016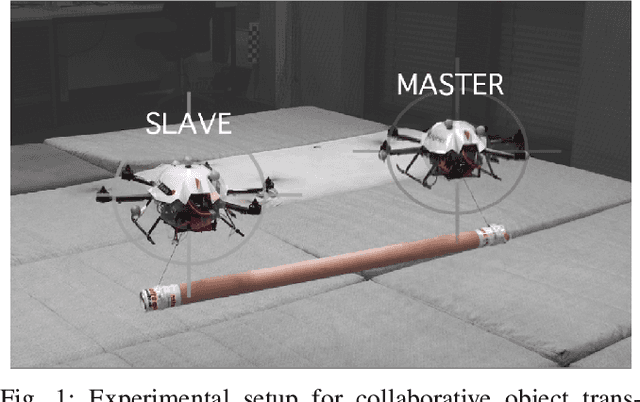
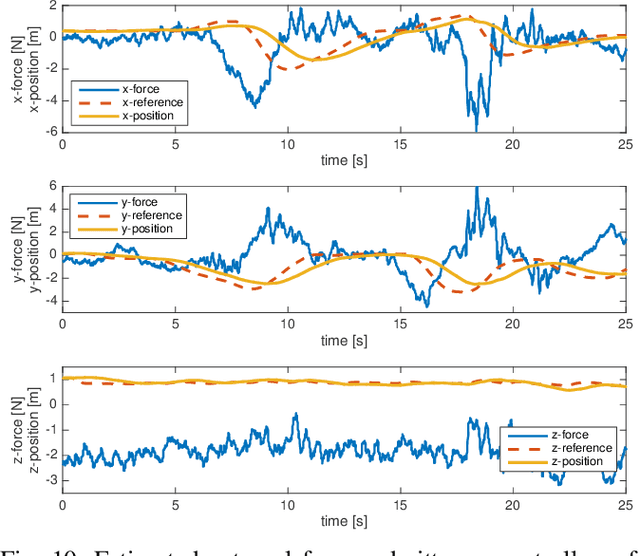
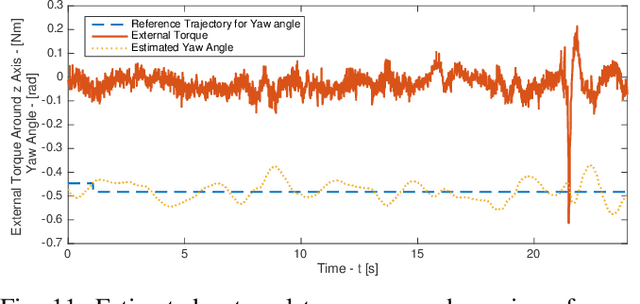
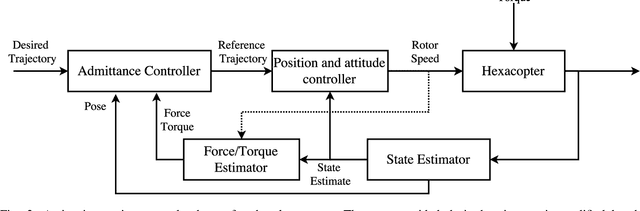
This paper shows a strategy based on passive force control for collaborative object transportation using Micro Aerial Vehicles (MAVs), focusing on the transportation of a bulky object by two hexacopters. The goal is to develop a robust approach which does not rely on: (a) communication links between the MAVs, (b) the knowledge of the payload shape and (c) the position of grasping point. The proposed approach is based on the master-slave paradigm, in which the slave agent guarantees compliance to the external force applied by the master to the payload via an admittance controller. The external force acting on the slave is estimated using a non-linear estimator based on the Unscented Kalman Filter (UKF) from the information provided by a visual inertial navigation system. Experimental results demonstrate the performance of the force estimator and show the collaborative transportation of a 1.2 m long object.
Aerial Picking and Delivery of Magnetic Objects with MAVs
Dec 08, 2016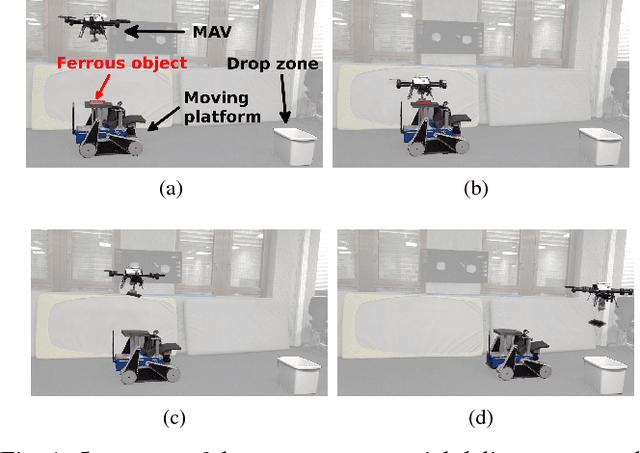
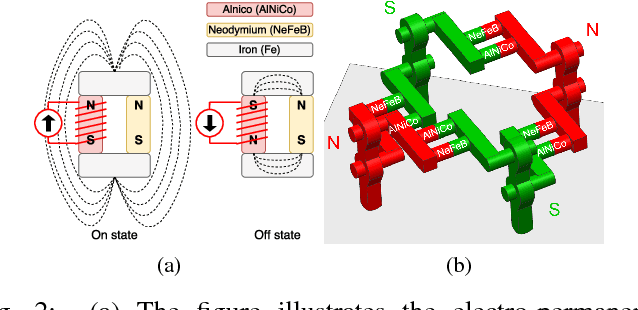
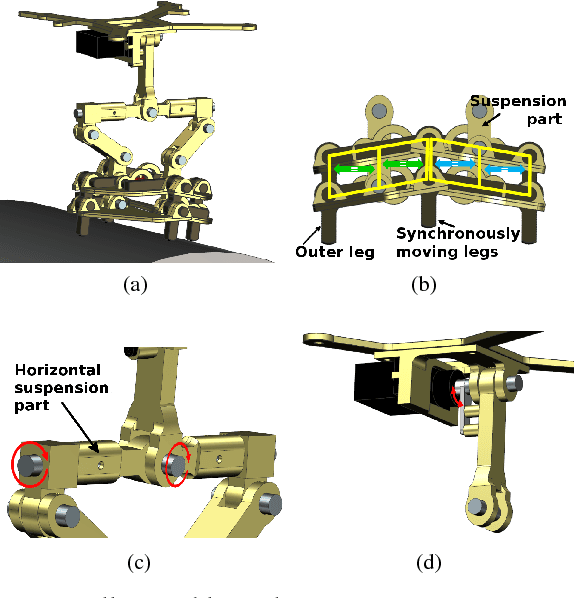
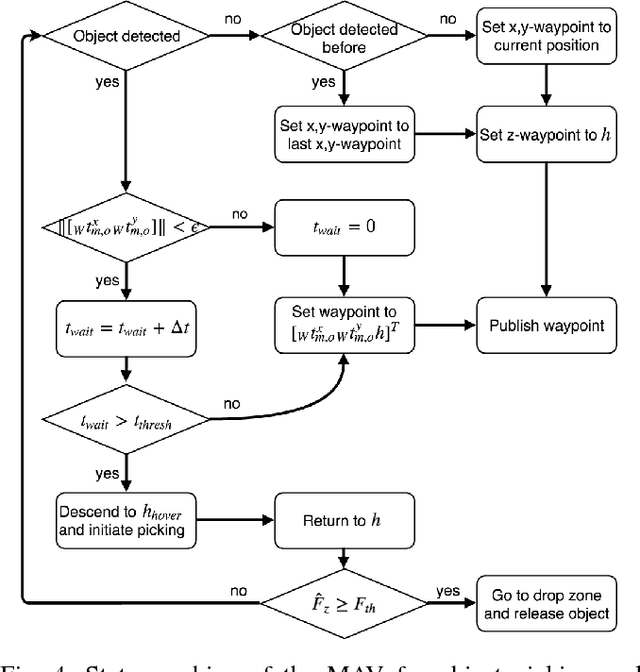
Autonomous delivery of goods using a MAV is a difficult problem, as it poses high demand on the MAV's control, perception and manipulation capabilities. This problem is especially challenging if the exact shape, location and configuration of the objects are unknown. In this paper, we report our findings during the development and evaluation of a fully integrated system that is energy efficient and enables MAVs to pick up and deliver objects with partly ferrous surface of varying shapes and weights. This is achieved by using a novel combination of an electro-permanent magnetic gripper with a passively compliant structure and integration with detection, control and servo positioning algorithms. The system's ability to grasp stationary and moving objects was tested, as well as its ability to cope with different shapes of the object and external disturbances. We show that such a system can be successfully deployed in scenarios where an object with partly ferrous parts needs to be gripped and placed in a predetermined location.
Online Informative Path Planning for Active Classification Using UAVs
Sep 27, 2016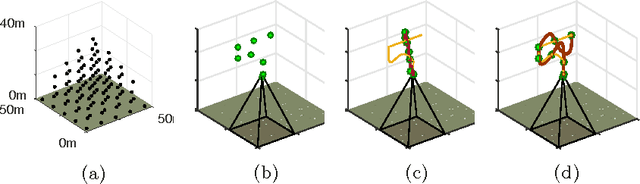
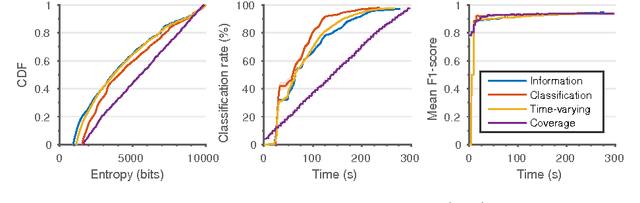
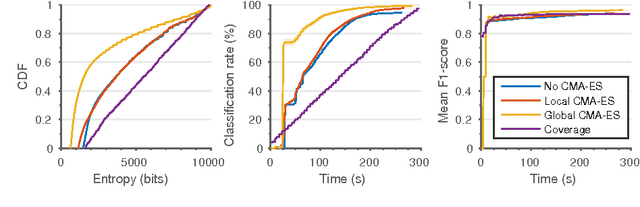
In this paper, we introduce an informative path planning (IPP) framework for active classification using unmanned aerial vehicles (UAVs). Our algorithm uses a combination of global viewpoint selection and evolutionary optimization to refine the planned trajectory in continuous 3D space while satisfying dynamic constraints. Our approach is evaluated on the application of weed detection for precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate adaptive plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We validate our approach in simulation by comparing against existing methods, and study the effects of different planning strategies. Our results show that the proposed algorithm builds maps with over 50% lower entropy compared to traditional "lawnmower" coverage in the same amount of time. We demonstrate the planning scheme on a multirotor platform with different artificial farmland set-ups.
Online Informative Path Planning for Active Classification on UAVs
Jul 13, 2016We propose an informative path planning (IPP) algorithm for active classification using an unmanned aerial vehicle (UAV), focusing on weed detection in precision agriculture. We model the presence of weeds on farmland using an occupancy grid and generate plans according to information-theoretic objectives, enabling the UAV to gather data efficiently. We use a combination of global viewpoint selection and evolutionary optimization to refine the UAV's trajectory in continuous space while satisfying dynamic constraints. We validate our approach in simulation by comparing against standard "lawnmower" coverage, and study the effects of varying objectives and optimization strategies. We plan to evaluate our algorithm on a real platform in the immediate future.