 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReWiND: Language-Guided Rewards Teach Robot Policies without New Demonstrations
May 16, 2025



We introduce ReWiND, a framework for learning robot manipulation tasks solely from language instructions without per-task demonstrations. Standard reinforcement learning (RL) and imitation learning methods require expert supervision through human-designed reward functions or demonstrations for every new task. In contrast, ReWiND starts from a small demonstration dataset to learn: (1) a data-efficient, language-conditioned reward function that labels the dataset with rewards, and (2) a language-conditioned policy pre-trained with offline RL using these rewards. Given an unseen task variation, ReWiND fine-tunes the pre-trained policy using the learned reward function, requiring minimal online interaction. We show that ReWiND's reward model generalizes effectively to unseen tasks, outperforming baselines by up to 2.4x in reward generalization and policy alignment metrics. Finally, we demonstrate that ReWiND enables sample-efficient adaptation to new tasks, beating baselines by 2x in simulation and improving real-world pretrained bimanual policies by 5x, taking a step towards scalable, real-world robot learning. See website at https://rewind-reward.github.io/.
EXTRACT: Efficient Policy Learning by Extracting Transferrable Robot Skills from Offline Data
Jun 25, 2024



Most reinforcement learning (RL) methods focus on learning optimal policies over low-level action spaces. While these methods can perform well in their training environments, they lack the flexibility to transfer to new tasks. Instead, RL agents that can act over useful, temporally extended skills rather than low-level actions can learn new tasks more easily. Prior work in skill-based RL either requires expert supervision to define useful skills, which is hard to scale, or learns a skill-space from offline data with heuristics that limit the adaptability of the skills, making them difficult to transfer during downstream RL. Our approach, EXTRACT, instead utilizes pre-trained vision language models to extract a discrete set of semantically meaningful skills from offline data, each of which is parameterized by continuous arguments, without human supervision. This skill parameterization allows robots to learn new tasks by only needing to learn when to select a specific skill and how to modify its arguments for the specific task. We demonstrate through experiments in sparse-reward, image-based, robot manipulation environments that EXTRACT can more quickly learn new tasks than prior works, with major gains in sample efficiency and performance over prior skill-based RL. Website at https://www.jessezhang.net/projects/extract/.
DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
Skill-based Meta-Reinforcement Learning
Apr 25, 2022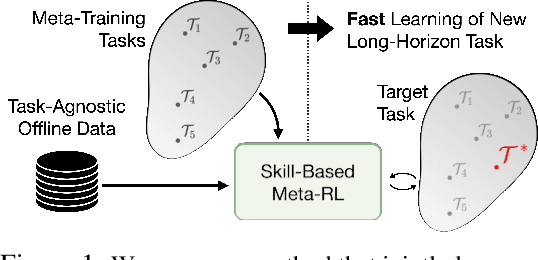
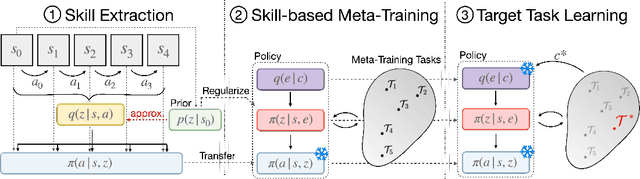
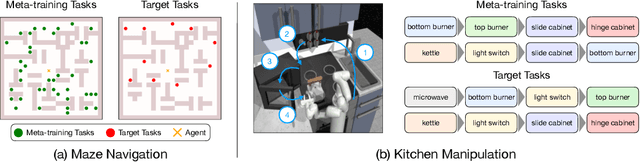
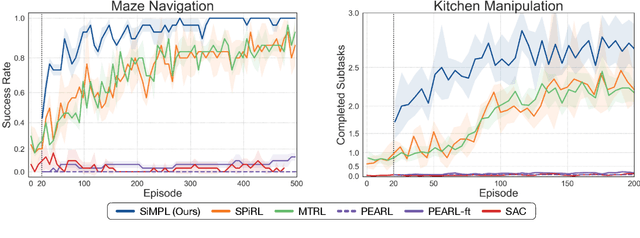
While deep reinforcement learning methods have shown impressive results in robot learning, their sample inefficiency makes the learning of complex, long-horizon behaviors with real robot systems infeasible. To mitigate this issue, meta-reinforcement learning methods aim to enable fast learning on novel tasks by learning how to learn. Yet, the application has been limited to short-horizon tasks with dense rewards. To enable learning long-horizon behaviors, recent works have explored leveraging prior experience in the form of offline datasets without reward or task annotations. While these approaches yield improved sample efficiency, millions of interactions with environments are still required to solve complex tasks. In this work, we devise a method that enables meta-learning on long-horizon, sparse-reward tasks, allowing us to solve unseen target tasks with orders of magnitude fewer environment interactions. Our core idea is to leverage prior experience extracted from offline datasets during meta-learning. Specifically, we propose to (1) extract reusable skills and a skill prior from offline datasets, (2) meta-train a high-level policy that learns to efficiently compose learned skills into long-horizon behaviors, and (3) rapidly adapt the meta-trained policy to solve an unseen target task. Experimental results on continuous control tasks in navigation and manipulation demonstrate that the proposed method can efficiently solve long-horizon novel target tasks by combining the strengths of meta-learning and the usage of offline datasets, while prior approaches in RL, meta-RL, and multi-task RL require substantially more environment interactions to solve the tasks.