 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOutlier-Robust unscented Kalman filter based on generalized correntropy induced
May 22, 2026Conventional Kalman filtering (KF) approaches exhibit significant limitations in addressing nonlinear state estimation problems contaminated by non-Gaussian noise disturbances. To overcome these challenges, this work proposes a robust iterative square root unscented Kalman Filter based on the generalized correntropy induced (SR-GCI-IUKF). While sharing the maximum correntropy criterion's (MCC) ability to characterize higher-order noise statistics, the proposed GCI framework exhibits intrinsic kernel bandwidth insensitivit a critical advantage enabling robust adaptation to diverse complex noise environments through its generalized kernel structure. For nonlinear state estimation challenges, the algorithm constructs a nonlinear error generalization model that dynamically corrects measurement-induced errors during the state update phase, thereby significantly enhancing estimation accuracy in strongly nonlinear regimes. Furthermore, the square-root decomposition implementation ensures numerical robustness by preserving covariance matrix positive definiteness throughout recursive operations. Theoretical stability guarantees are established through rigorous error dynamics analysis, demonstrating bounded estimation variance under non-Gaussian disturbances. Finally, experiments are carried out in nonlinear systems, land vehicle navigation systems as well as power system FASE to compare other robust algorithms, and it is determined that the proposed algorithm has stronger robustness.
Decentralized Variational Bayesian UKF with Maximum Generalized Student's t-kernel Correntropy for Wide-Area Power System state estimation
May 22, 2026A Conventional centralized state estimators exhibit limited robustness in large-scale grids and face practical deployment hurdles. To overcome these challenges, this paper proposes a decentralized maximum generalized Student's t-kernel correntropy Variational Bayesian unscented Kalman filter (D-MGST-VBUKF). The algorithm optimizes the estimation performance at three levels for the regionalized state estimation needs: first, to address non-Gaussian measurement noise in practical systems, we propose the cost function using MGST, retaining Student's t robustness while improving adaptability to complex noise by expanding the degree-of-freedom parameter; secondly, the VB inference framework is constructed to model the unknown noise distribution online, and the joint optimization of the noise statistical characteristics and state estimation is realized by constructing the conjugate prior distribution; finally, the regional state fusion mechanism is established based on the topological correlation characteristics of the power grid, and the global consistency correction of the local estimation results is realized by constructing the state coordination equation of the boundary nodes. Simulation experiments in IEEE 14-bus and IEEE 39-bus system show that the method has stronger robustness compared with the traditional algorithm under non-Gaussian noise environment and unknown noise environment.
Broad learning system with robust adaptive kernel
May 22, 2026For the performance degradation problem of broad learning system (BLS) in non-Gaussian noise environment, the variant of BLS based on M-estimator shows good robust performance. However, in most cases, the determination of the optimal loss function is often very time-consuming due to the lack of prior knowledge of the sample data. Therefore, this paper constructs a variant of BLS based on adaptive robust kernel (AR-BLS) to improve the generalization performance of the model in non-Gaussian noise environment. Adaptive robust kernel function is a general loss function that includes many common M-estimator paradigms. By alternately optimizing model weights and adaptive robust kernel parameters, AR-BLS realizes the adaptive adjustment of model robustness under different outlier noise distributions without human intervention. In addition, the iterative convergence of AR-BLS algorithm is proved based on Zangwill's global convergence theorem. Simulation experiments on multiple public datasets and actual application scenarios verify the effectiveness of the proposed method.
A Fast Robust Adaptive filter using Improved Data-Reuse Method
May 18, 2026Adaptive filter in complex scenarios demands algorithms that integrate fast convergence, low complexity, and robust performance under diverse noise conditions. To address this challenge, we propose a online censoring robust total generalized adaptive filter using improved data-reused method (RTGA-IDROC) algorithm. The proposed RTGA variant possesses the advantages of both the total least squares (TLS) strategy and the robust generalized adaptive (RGA) function. This algorithm not only effectively handles input noise under the errors-in-variables (EIV) model but also achieves excellent performance across diverse noise environments. Furthermore, to meet the high demand for convergence speed in practical applications, an improved data reuse (IDR) method is introduced, enabling faster convergence in the early stages of iteration without compromising steady-state performance. The increased computational complexity brought by the IDR method is mitigated using the online censoring (OC) strategy. We also modify the OC threshold for real-valued algorithms, as the original threshold was defined for the complex domain. Beyond these algorithmic enhancements, a local stability analysis for the proposed algorithm is provided, and the theoretical steady-state mean-square deviation (MSD) is derived. Finally, simulation experiments in system identification and acoustic echo cancellation (AEC) scenarios validate the superior performance of the proposed algorithm.
Robust distributed extended Kalman filter based on adaptive multi-kernel mixture maximum correntropy for non-Gaussian systems
Jan 17, 2026As one of the most advanced variants in the correntropy family, the multi-kernel correntropy criterion demonstrates superior accuracy in handling non-Gaussian noise, particularly with multimodal distributions. However, current approaches suffer from key limitations-namely, reliance on a single type of sensitive Gaussian kernel and the manual selection of free parameters. To address these issues and further boost robustness, this paper introduces the concept of multi-kernel mixture correntropy (MKMC), along with its key properties. MKMC employs a flexible kernel function composed of a mixture of two Students t-Cauchy functions with adjustable (non-zero) means. Building on this criterion within multi-sensor networks, we propose a robust distributed extended Kalman filter-AMKMMC-RDEKF based on adaptive multi-kernel mixture maximum correntropy. To reduce communication overhead, a consensus averaging strategy is incorporated. Furthermore, an adaptive mechanism is introduced to mitigate the impact of manually tuned free parameters. At the same time, the computational complexity and convergence ability of the proposed algorithm are analyzed. The effectiveness of the proposed algorithm is validated through challenging scenarios involving power system and land vehicle state estimation.
Adaptive Robust Unscented Kalman Filter for Dynamic State Estimation of Power System
Apr 10, 2025Non-Gaussian noise and the uncertainty of noise distribution are the common factors that reduce accuracy in dynamic state estimation of power systems (PS). In addition, the optimal value of the free coefficients in the unscented Kalman filter (UKF) based on information theoretic criteria is also an urgent problem. In this paper, a robust adaptive UKF (AUKF) under generalized minimum mixture error entropy with fiducial points (GMMEEF) over improve Snow Geese algorithm (ISGA) (ISGA-GMMEEF-AUKF) is proposed to overcome the above difficulties. The estimation process of the proposed algorithm is based on several key steps including augmented regression error model (AREM) construction, adaptive state estimation, and free coefficients optimization. Specifically, an AREM consisting of state prediction and measurement errors is established at the first step. Then, GMMEEF-AUKF is developed by solving the optimization problem based on GMMEEF, which uses a generalized Gaussian kernel combined with mixture correntropy to enhance the flexibility further and resolve the data problem with complex attributes and update the noise covariance matrix according to the AREM framework. Finally, the ISGA is designed to automatically calculate the optimal value of coefficients such as the shape coefficients of the kernel in the GMMEEF criterion, the coefficients selection sigma points in unscented transform, and the update coefficient of the noise covariance matrices fit with the PS model. Simulation results on the IEEE 14, 30, and 57-bus test systems in complex scenarios have confirmed that the proposed algorithm outperforms the MEEF-UKF and UKF by an average efficiency of 26% and 65%, respectively.
Diffusion Augmented Complex Maximum Total Correntropy Algorithm for Power System Frequency Estimation
Apr 10, 2025


Currently, adaptive filtering algorithms have been widely applied in frequency estimation for power systems. However, research on diffusion tasks remains insufficient. Existing diffusion adaptive frequency estimation algorithms exhibit certain limitations in handling input noise and lack robustness against impulsive noise. Moreover, traditional adaptive filtering algorithms designed based on the strictly-linear (SL) model fail to effectively address frequency estimation challenges in unbalanced three-phase power systems. To address these issues, this letter proposes an improved diffusion augmented complex maximum total correntropy (DAMTCC) algorithm based on the widely linear (WL) model. The proposed algorithm not only significantly enhances the capability to handle input noise but also demonstrates superior robustness to impulsive noise. Furthermore, it successfully resolves the critical challenge of frequency estimation in unbalanced three-phase power systems, offering an efficient and reliable solution for diffusion power system frequency estimation. Finally, we analyze the stability of the algorithm and computer simulations verify the excellent performance of the algorithm.
Robust Square Root Unscented Kalman filter of graph signals
Sep 11, 2024



Considering the problem of nonlinear and non-gaussian filtering of the graph signal, in this paper, a robust square root unscented Kalman filter based on graph signal processing is proposed. The algorithm uses a graph topology to generate measurements and an unscented transformation is used to obtain the priori state estimates. In addition, in order to enhance the numerical stability of the unscented Kalman filter, the algorithm combines the double square root decomposition method to update the covariance matrix in the graph frequency domain. Furthermore, to handle the non-Gaussian noise problem in the state estimation process, an error augmentation model is constructed in the graph frequency domain by unifying the measurement error and state error, which utilizes the Laplace matrix of the graph to effectively reduce the cumulative error at each vertex. Then the general robust cost function is adopted as the optimal criterion to deal with the error, which has more parameter options so that effectively suppresses the problems of random outliers and abnormal measurement values in the state estimation process. Finally, the convergence of the error of the proposed algorithm is firstly verified theoretically, and then the robustness of the proposed algorithm is verified by experimental simulation.
MIPI 2024 Challenge on Few-shot RAW Image Denoising: Methods and Results
Jun 11, 2024



The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Few-shot RAW Image Denoising track on MIPI 2024. In total, 165 participants were successfully registered, and 7 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art erformance on Few-shot RAW Image Denoising. More details of this challenge and the link to the dataset can be found at https://mipichallenge.org/MIPI2024.
Deep CNN Denoiser and Multi-layer Neighbor Component Embedding for Face Hallucination
Jun 28, 2018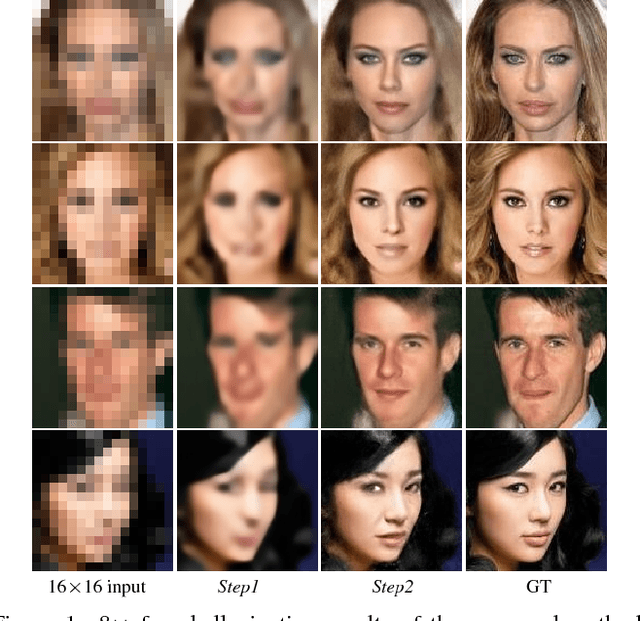

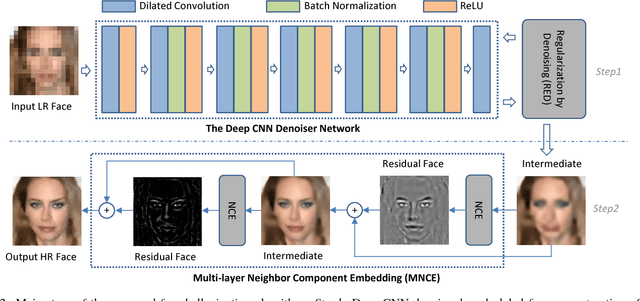
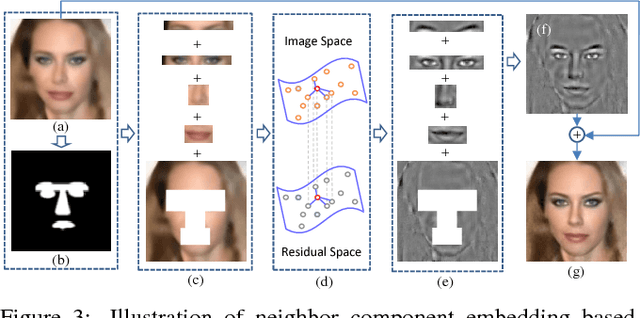
Most of the current face hallucination methods, whether they are shallow learning-based or deep learning-based, all try to learn a relationship model between Low-Resolution (LR) and High-Resolution (HR) spaces with the help of a training set. They mainly focus on modeling image prior through either model-based optimization or discriminative inference learning. However, when the input LR face is tiny, the learned prior knowledge is no longer effective and their performance will drop sharply. To solve this problem, in this paper we propose a general face hallucination method that can integrate model-based optimization and discriminative inference. In particular, to exploit the model based prior, the Deep Convolutional Neural Networks (CNN) denoiser prior is plugged into the super-resolution optimization model with the aid of image-adaptive Laplacian regularization. Additionally, we further develop a high-frequency details compensation method by dividing the face image to facial components and performing face hallucination in a multi-layer neighbor embedding manner. Experiments demonstrate that the proposed method can achieve promising super-resolution results for tiny input LR faces.