 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-based Abstraction and Concretization for GUI Test Migration
Sep 08, 2024



GUI test migration aims to produce test cases with events and assertions to test specific functionalities of a target app. Existing migration approaches typically focus on the widget-mapping paradigm that maps widgets from source apps to target apps. However, since different apps may implement the same functionality in different ways, direct mapping may result in incomplete or buggy test cases, thus significantly impacting the effectiveness of testing target functionality and the practical applicability. In this paper, we propose a new migration paradigm (i.e., abstraction-concretization paradigm) that first abstracts the test logic for the target functionality and then utilizes this logic to generate the concrete GUI test case. Furthermore, we introduce MACdroid, the first approach that migrates GUI test cases based on this paradigm. Specifically, we propose an abstraction technique that utilizes source test cases from source apps targeting the same functionality to extract a general test logic for that functionality. Then, we propose a concretization technique that utilizes the general test logic to guide an LLM in generating the corresponding GUI test case (including events and assertions) for the target app. We evaluate MACdroid on two widely-used datasets (including 31 apps, 34 functionalities, and 123 test cases). On the FrUITeR dataset, the test cases generated by MACdroid successfully test 64% of the target functionalities, improving the baselines by 191%. On the Lin dataset, MACdroid successfully tests 75% of the target functionalities, outperforming the baselines by 42%. These results underscore the effectiveness of MACdroid in GUI test migration.
Contribution Evaluation of Heterogeneous Participants in Federated Learning via Prototypical Representations
Jul 02, 2024Contribution evaluation in federated learning (FL) has become a pivotal research area due to its applicability across various domains, such as detecting low-quality datasets, enhancing model robustness, and designing incentive mechanisms. Existing contribution evaluation methods, which primarily rely on data volume, model similarity, and auxiliary test datasets, have shown success in diverse scenarios. However, their effectiveness often diminishes due to the heterogeneity of data distributions, presenting a significant challenge to their applicability. In response, this paper explores contribution evaluation in FL from an entirely new perspective of representation. In this work, we propose a new method for the contribution evaluation of heterogeneous participants in federated learning (FLCE), which introduces a novel indicator \emph{class contribution momentum} to conduct refined contribution evaluation. Our core idea is the construction and application of the class contribution momentum indicator from individual, relative, and holistic perspectives, thereby achieving an effective and efficient contribution evaluation of heterogeneous participants without relying on an auxiliary test dataset. Extensive experimental results demonstrate the superiority of our method in terms of fidelity, effectiveness, efficiency, and heterogeneity across various scenarios.
Towards Large Language Model Aided Program Refinement
Jun 26, 2024Program refinement involves correctness-preserving transformations from formal high-level specification statements into executable programs. Traditional verification tool support for program refinement is highly interactive and lacks automation. On the other hand, the emergence of large language models (LLMs) enables automatic code generations from informal natural language specifications. However, code generated by LLMs is often unreliable. Moreover, the opaque procedure from specification to code provided by LLM is an uncontrolled black box. We propose LLM4PR, a tool that combines formal program refinement techniques with informal LLM-based methods to (1) transform the specification to preconditions and postconditions, (2) automatically build prompts based on refinement calculus, (3) interact with LLM to generate code, and finally, (4) verify that the generated code satisfies the conditions of refinement calculus, thus guaranteeing the correctness of the code. We have implemented our tool using GPT4, Coq, and Coqhammer, and evaluated it on the HumanEval and EvalPlus datasets.
Exploring the Evolution of Hidden Activations with Live-Update Visualization
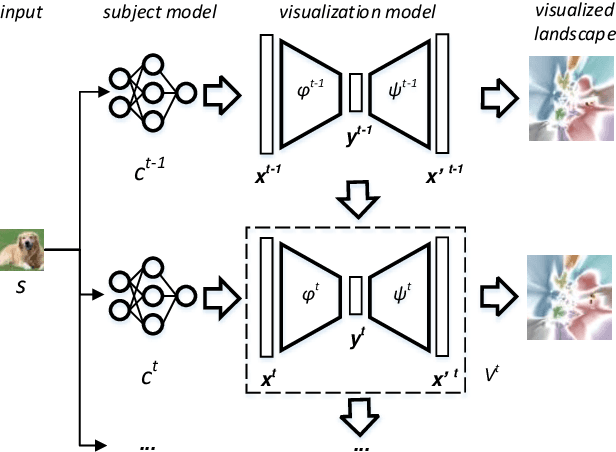
May 24, 2024Monitoring the training of neural networks is essential for identifying potential data anomalies, enabling timely interventions and conserving significant computational resources. Apart from the commonly used metrics such as losses and validation accuracies, the hidden representation could give more insight into the model progression. To this end, we introduce SentryCam, an automated, real-time visualization tool that reveals the progression of hidden representations during training. Our results show that this visualization offers a more comprehensive view of the learning dynamics compared to basic metrics such as loss and accuracy over various datasets. Furthermore, we show that SentryCam could facilitate detailed analysis such as task transfer and catastrophic forgetting to a continual learning setting. The code is available at https://github.com/xianglinyang/SentryCam.
Towards Transferable Attacks Against Vision-LLMs in Autonomous Driving with Typography
May 23, 2024Vision-Large-Language-Models (Vision-LLMs) are increasingly being integrated into autonomous driving (AD) systems due to their advanced visual-language reasoning capabilities, targeting the perception, prediction, planning, and control mechanisms. However, Vision-LLMs have demonstrated susceptibilities against various types of adversarial attacks, which would compromise their reliability and safety. To further explore the risk in AD systems and the transferability of practical threats, we propose to leverage typographic attacks against AD systems relying on the decision-making capabilities of Vision-LLMs. Different from the few existing works developing general datasets of typographic attacks, this paper focuses on realistic traffic scenarios where these attacks can be deployed, on their potential effects on the decision-making autonomy, and on the practical ways in which these attacks can be physically presented. To achieve the above goals, we first propose a dataset-agnostic framework for automatically generating false answers that can mislead Vision-LLMs' reasoning. Then, we present a linguistic augmentation scheme that facilitates attacks at image-level and region-level reasoning, and we extend it with attack patterns against multiple reasoning tasks simultaneously. Based on these, we conduct a study on how these attacks can be realized in physical traffic scenarios. Through our empirical study, we evaluate the effectiveness, transferability, and realizability of typographic attacks in traffic scenes. Our findings demonstrate particular harmfulness of the typographic attacks against existing Vision-LLMs (e.g., LLaVA, Qwen-VL, VILA, and Imp), thereby raising community awareness of vulnerabilities when incorporating such models into AD systems. We will release our source code upon acceptance.
PAODING: A High-fidelity Data-free Pruning Toolkit for Debloating Pre-trained Neural Networks
Apr 30, 2024

We present PAODING, a toolkit to debloat pretrained neural network models through the lens of data-free pruning. To preserve the model fidelity, PAODING adopts an iterative process, which dynamically measures the effect of deleting a neuron to identify candidates that have the least impact to the output layer. Our evaluation shows that PAODING can significantly reduce the model size, generalize on different datasets and models, and meanwhile preserve the model fidelity in terms of test accuracy and adversarial robustness. PAODING is publicly available on PyPI via https://pypi.org/project/paoding-dl.
Adversarial Robustness of Deep Neural Networks: A Survey from a Formal Verification Perspective
Jun 24, 2022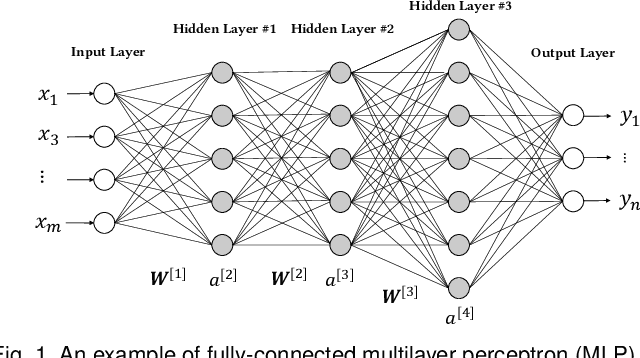
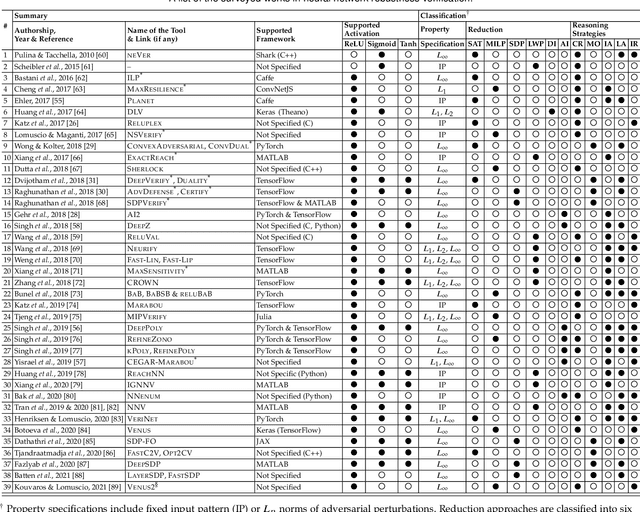
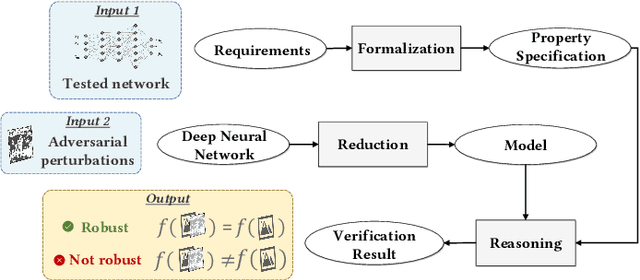
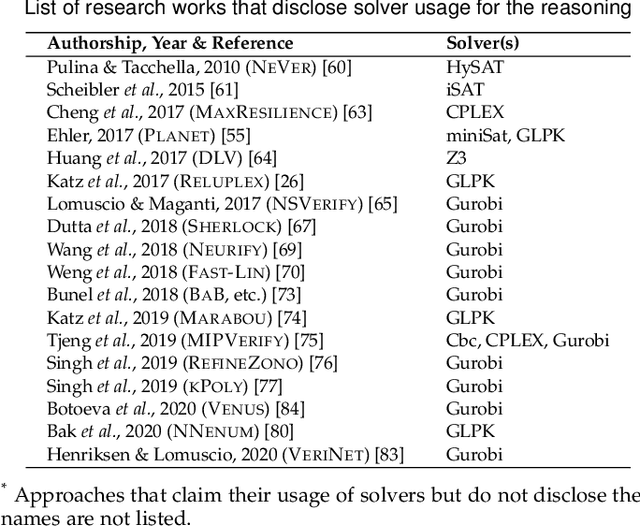
Neural networks have been widely applied in security applications such as spam and phishing detection, intrusion prevention, and malware detection. This black-box method, however, often has uncertainty and poor explainability in applications. Furthermore, neural networks themselves are often vulnerable to adversarial attacks. For those reasons, there is a high demand for trustworthy and rigorous methods to verify the robustness of neural network models. Adversarial robustness, which concerns the reliability of a neural network when dealing with maliciously manipulated inputs, is one of the hottest topics in security and machine learning. In this work, we survey existing literature in adversarial robustness verification for neural networks and collect 39 diversified research works across machine learning, security, and software engineering domains. We systematically analyze their approaches, including how robustness is formulated, what verification techniques are used, and the strengths and limitations of each technique. We provide a taxonomy from a formal verification perspective for a comprehensive understanding of this topic. We classify the existing techniques based on property specification, problem reduction, and reasoning strategies. We also demonstrate representative techniques that have been applied in existing studies with a sample model. Finally, we discuss open questions for future research.
Paoding: Supervised Robustness-preserving Data-free Neural Network Pruning
Apr 02, 2022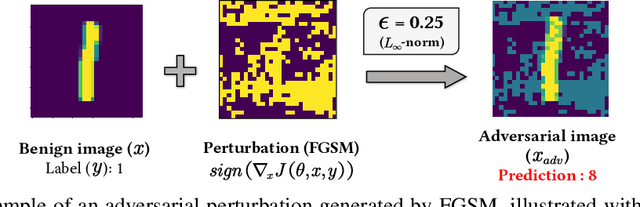

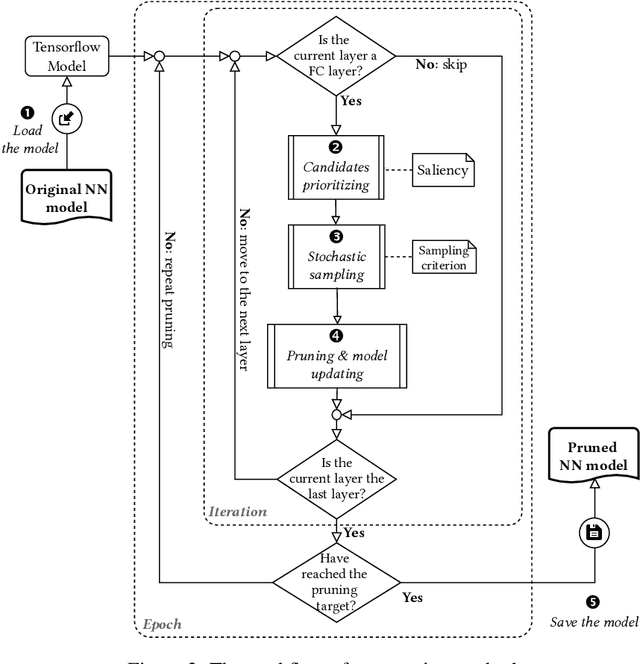
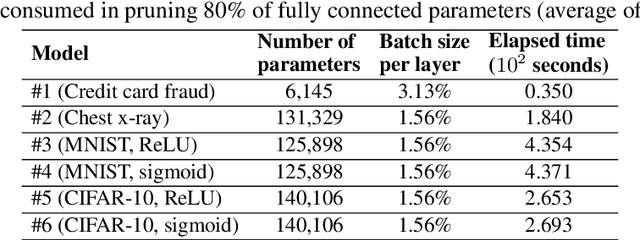
When deploying pre-trained neural network models in real-world applications, model consumers often encounter resource-constraint platforms such as mobile and smart devices. They typically use the pruning technique to reduce the size and complexity of the model, generating a lighter one with less resource consumption. Nonetheless, most existing pruning methods are proposed with a premise that the model after being pruned has a chance to be fine-tuned or even retrained based on the original training data. This may be unrealistic in practice, as the data controllers are often reluctant to provide their model consumers with the original data. In this work, we study the neural network pruning in the \emph{data-free} context, aiming to yield lightweight models that are not only accurate in prediction but also robust against undesired inputs in open-world deployments. Considering the absence of the fine-tuning and retraining that can fix the mis-pruned units, we replace the traditional aggressive one-shot strategy with a conservative one that treats the pruning as a progressive process. We propose a pruning method based on stochastic optimization that uses robustness-related metrics to guide the pruning process. Our method is implemented as a Python package named \textsc{Paoding} and evaluated with a series of experiments on diverse neural network models. The experimental results show that it significantly outperforms existing one-shot data-free pruning approaches in terms of robustness preservation and accuracy.
A Prompting-based Approach for Adversarial Example Generation and Robustness Enhancement
Mar 21, 2022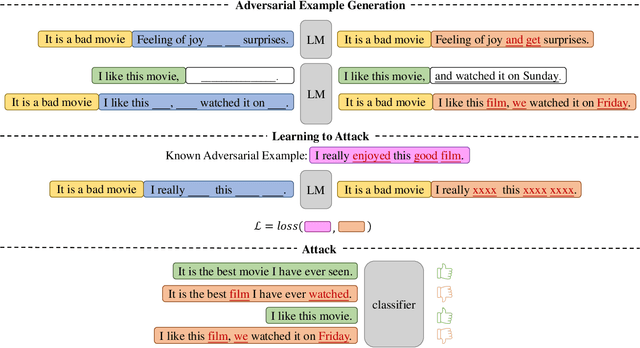


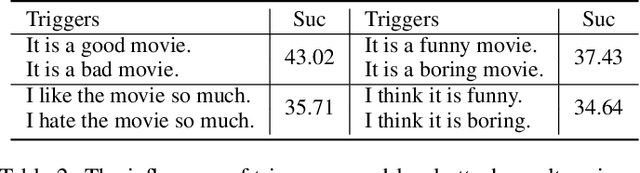
Recent years have seen the wide application of NLP models in crucial areas such as finance, medical treatment, and news media, raising concerns of the model robustness and vulnerabilities. In this paper, we propose a novel prompt-based adversarial attack to compromise NLP models and robustness enhancement technique. We first construct malicious prompts for each instance and generate adversarial examples via mask-and-filling under the effect of a malicious purpose. Our attack technique targets the inherent vulnerabilities of NLP models, allowing us to generate samples even without interacting with the victim NLP model, as long as it is based on pre-trained language models (PLMs). Furthermore, we design a prompt-based adversarial training method to improve the robustness of PLMs. As our training method does not actually generate adversarial samples, it can be applied to large-scale training sets efficiently. The experimental results show that our attack method can achieve a high attack success rate with more diverse, fluent and natural adversarial examples. In addition, our robustness enhancement method can significantly improve the robustness of models to resist adversarial attacks. Our work indicates that prompting paradigm has great potential in probing some fundamental flaws of PLMs and fine-tuning them for downstream tasks.
DeepVisualInsight: Time-Travelling Visualization for Spatio-Temporal Causality of Deep Classification Training
Dec 31, 2021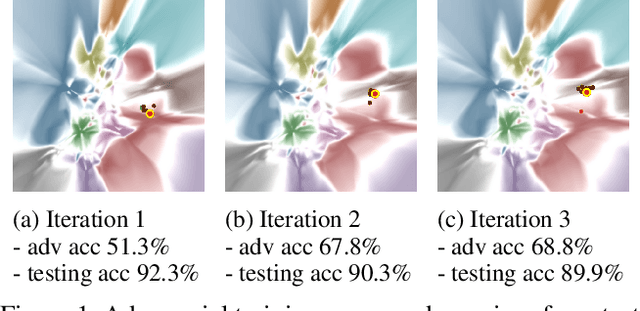
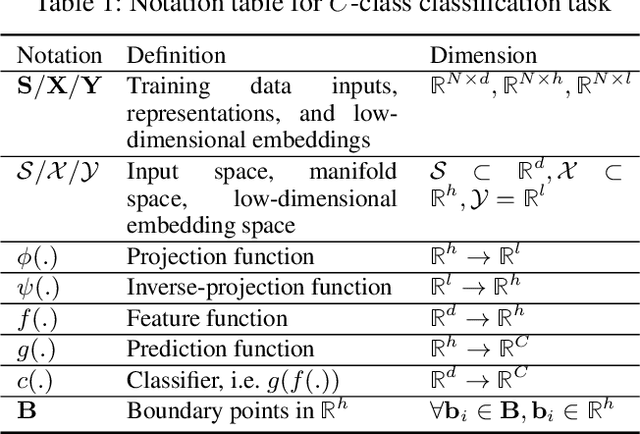
Understanding how the predictions of deep learning models are formed during the training process is crucial to improve model performance and fix model defects, especially when we need to investigate nontrivial training strategies such as active learning, and track the root cause of unexpected training results such as performance degeneration. In this work, we propose a time-travelling visual solution DeepVisualInsight (DVI), aiming to manifest the spatio-temporal causality while training a deep learning image classifier. The spatio-temporal causality demonstrates how the gradient-descent algorithm and various training data sampling techniques can influence and reshape the layout of learnt input representation and the classification boundaries in consecutive epochs. Such causality allows us to observe and analyze the whole learning process in the visible low dimensional space. Technically, we propose four spatial and temporal properties and design our visualization solution to satisfy them. These properties preserve the most important information when inverse-)projecting input samples between the visible low-dimensional and the invisible high-dimensional space, for causal analyses. Our extensive experiments show that, comparing to baseline approaches, we achieve the best visualization performance regarding the spatial/temporal properties and visualization efficiency. Moreover, our case study shows that our visual solution can well reflect the characteristics of various training scenarios, showing good potential of DVI as a debugging tool for analyzing deep learning training processes.