 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLinf-USER: A Unified and Extensible System for Real-World Online Policy Learning in Embodied AI
Feb 08, 2026Online policy learning directly in the physical world is a promising yet challenging direction for embodied intelligence. Unlike simulation, real-world systems cannot be arbitrarily accelerated, cheaply reset, or massively replicated, which makes scalable data collection, heterogeneous deployment, and long-horizon effective training difficult. These challenges suggest that real-world policy learning is not only an algorithmic issue but fundamentally a systems problem. We present USER, a Unified and extensible SystEm for Real-world online policy learning. USER treats physical robots as first-class hardware resources alongside GPUs through a unified hardware abstraction layer, enabling automatic discovery, management, and scheduling of heterogeneous robots. To address cloud-edge communication, USER introduces an adaptive communication plane with tunneling-based networking, distributed data channels for traffic localization, and streaming-multiprocessor-aware weight synchronization to regulate GPU-side overhead. On top of this infrastructure, USER organizes learning as a fully asynchronous framework with a persistent, cache-aware buffer, enabling efficient long-horizon experiments with robust crash recovery and reuse of historical data. In addition, USER provides extensible abstractions for rewards, algorithms, and policies, supporting online imitation or reinforcement learning of CNN/MLP, generative policies, and large vision-language-action (VLA) models within a unified pipeline. Results in both simulation and the real world show that USER enables multi-robot coordination, heterogeneous manipulators, edge-cloud collaboration with large models, and long-running asynchronous training, offering a unified and extensible systems foundation for real-world online policy learning.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
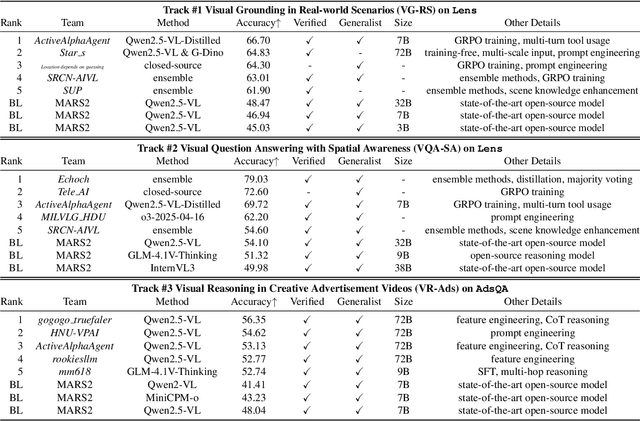

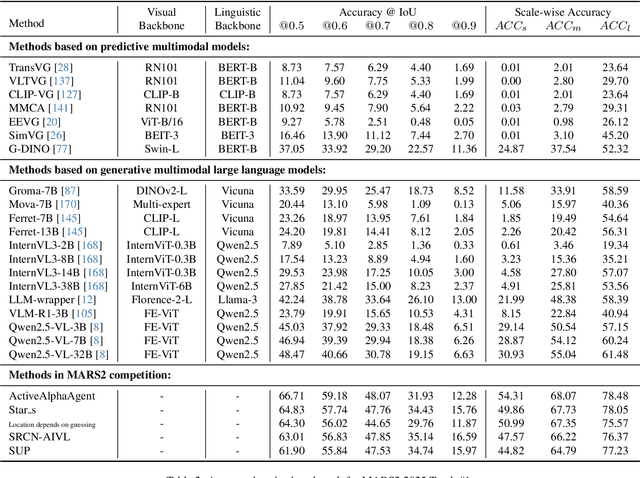
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.