 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer Stereo Vision for Autonomous Driving
Dec 17, 2020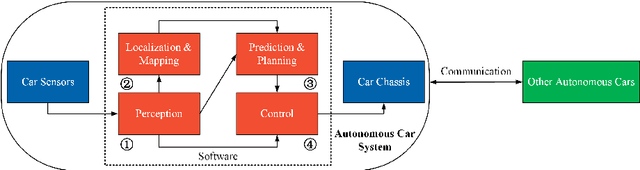
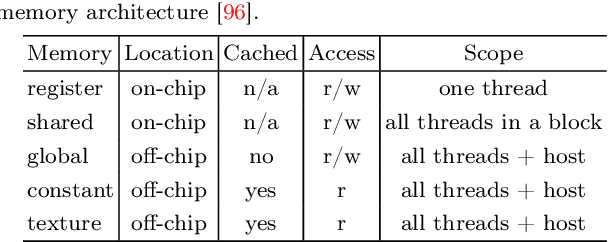
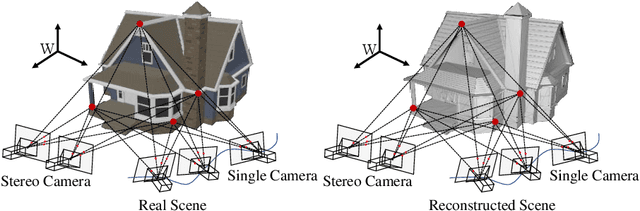
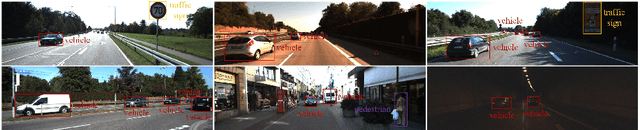
As an important component of autonomous systems, autonomous car perception has had a big leap with recent advances in parallel computing architectures. With the use of tiny but full-feature embedded supercomputers, computer stereo vision has been prevalently applied in autonomous cars for depth perception. The two key aspects of computer stereo vision are speed and accuracy. They are both desirable but conflicting properties, as the algorithms with better disparity accuracy usually have higher computational complexity. Therefore, the main aim of developing a computer stereo vision algorithm for resource-limited hardware is to improve the trade-off between speed and accuracy. In this chapter, we introduce both the hardware and software aspects of computer stereo vision for autonomous car systems. Then, we discuss four autonomous car perception tasks, including 1) visual feature detection, description and matching, 2) 3D information acquisition, 3) object detection/recognition and 4) semantic image segmentation. The principles of computer stereo vision and parallel computing on multi-threading CPU and GPU architectures are then detailed.
ATG-PVD: Ticketing Parking Violations on A Drone
Aug 21, 2020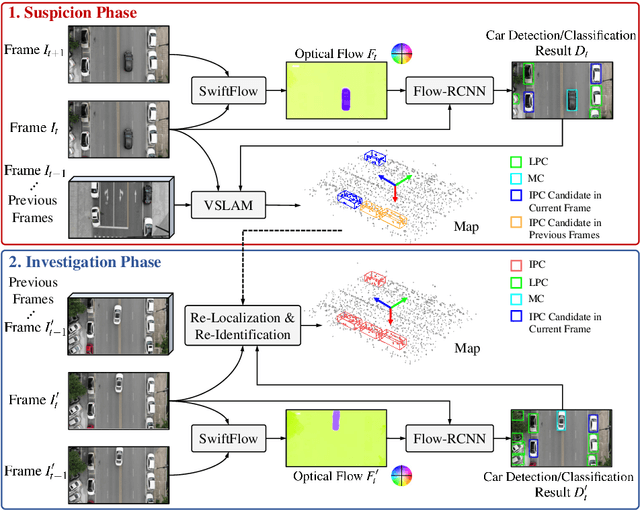
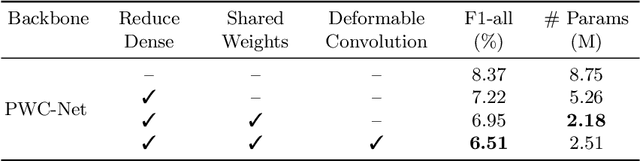
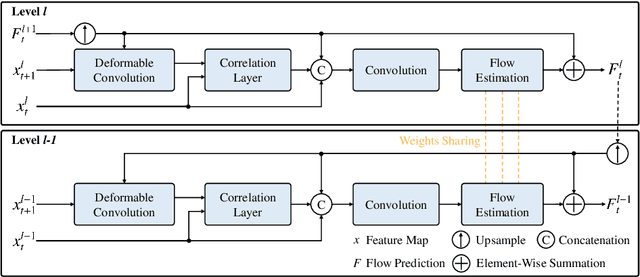
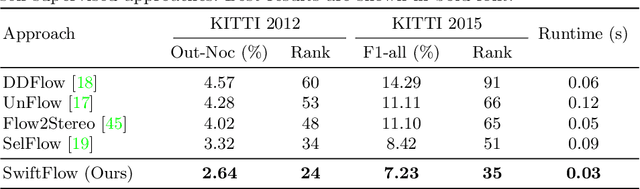
In this paper, we introduce a novel suspect-and-investigate framework, which can be easily embedded in a drone for automated parking violation detection (PVD). Our proposed framework consists of: 1) SwiftFlow, an efficient and accurate convolutional neural network (CNN) for unsupervised optical flow estimation; 2) Flow-RCNN, a flow-guided CNN for car detection and classification; and 3) an illegally parked car (IPC) candidate investigation module developed based on visual SLAM. The proposed framework was successfully embedded in a drone from ATG Robotics. The experimental results demonstrate that, firstly, our proposed SwiftFlow outperforms all other state-of-the-art unsupervised optical flow estimation approaches in terms of both speed and accuracy; secondly, IPC candidates can be effectively and efficiently detected by our proposed Flow-RCNN, with a better performance than our baseline network, Faster-RCNN; finally, the actual IPCs can be successfully verified by our investigation module after drone re-localization.
Three-Filters-to-Normal: An Accurate and Ultrafast Surface Normal Estimator
May 23, 2020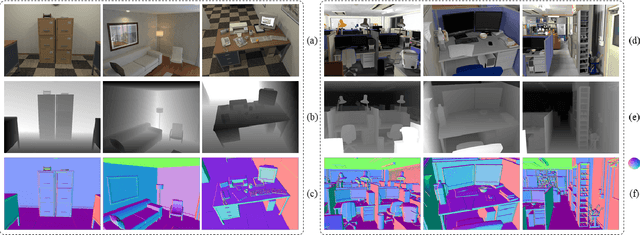
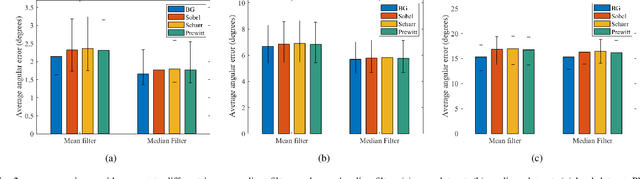
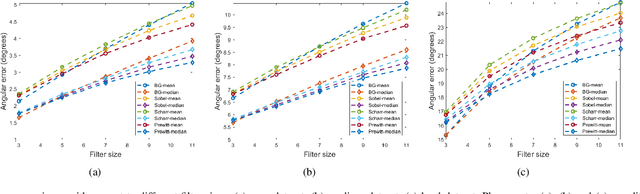
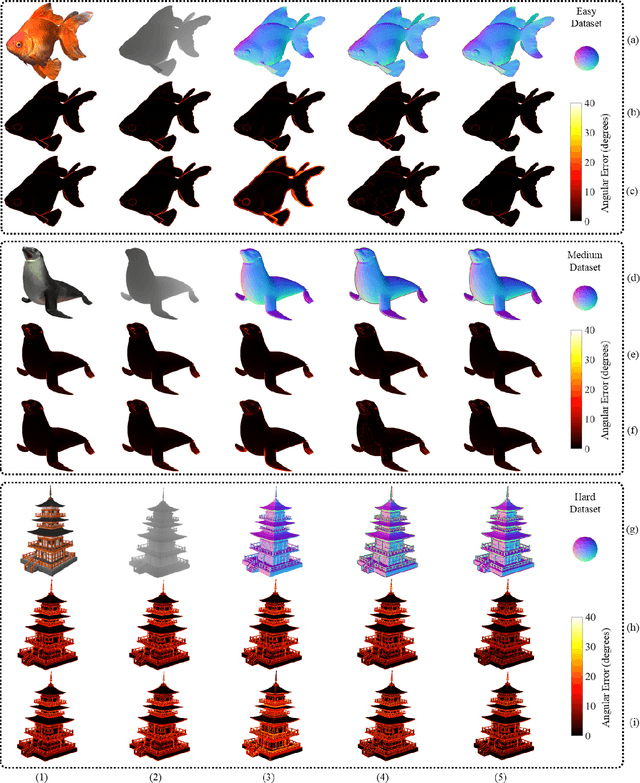
Over the past decade, significant efforts have been made to improve the trade-off between speed and accuracy of surface normal estimators (SNEs). This paper introduces an accurate and ultrafast SNE for structured range data. The proposed approach computes surface normals by simply performing three filtering operations, namely, two image gradient filters (in horizontal and vertical directions, respectively) and a mean/median filter, on an inverse depth image or a disparity image. Despite the simplicity of the method, no similar method already exists in the literature. In our experiments, we created three large-scale synthetic datasets (easy, medium and hard) using 24 3-dimensional (3D) mesh models. Each mesh model is used to generate 1800--2500 pairs of 480x640 pixel depth images and the corresponding surface normal ground truth from different views. The average angular errors with respect to the easy, medium and hard datasets are 1.6 degrees, 5.6 degrees and 15.3 degrees, respectively. Our C++ and CUDA implementations achieve a processing speed of over 260 Hz and 21 kHz, respectively. Our proposed SNE achieves a better overall performance than all other existing computer vision-based SNEs. Our datasets and source code are publicly available at: sites.google.com/view/3f2n.
A Robust Pavement Mapping System Based on Normal-Constrained Stereo Visual Odometry
Oct 29, 2019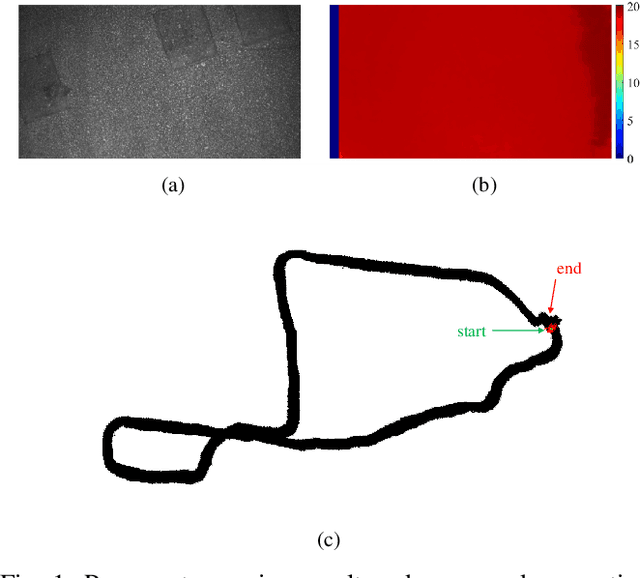
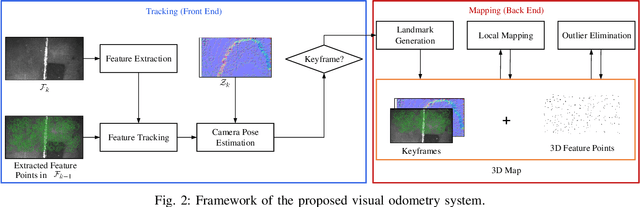
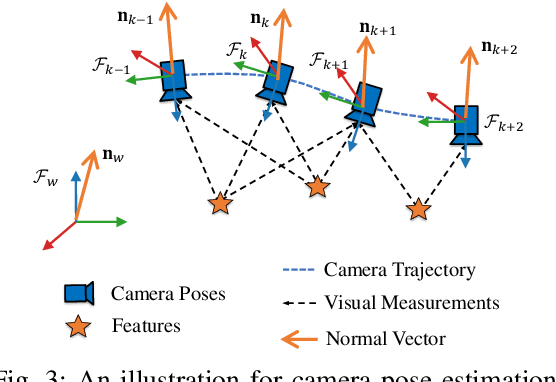
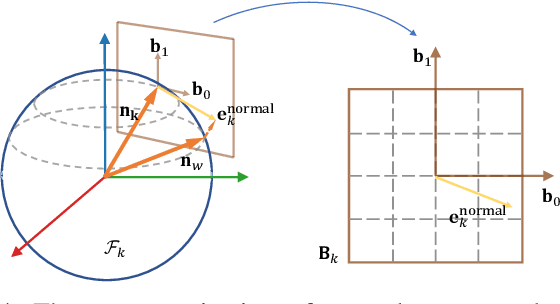
Pavement condition is crucial for civil infrastructure maintenance. This task usually requires efficient road damage localization, which can be accomplished by the visual odometry system embedded in unmanned aerial vehicles (UAVs). However, the state-of-the-art visual odometry and mapping methods suffer from large drift under the degeneration of the scene structure. To alleviate this issue, we integrate normal constraints into the visual odometry process, which greatly helps to avoid large drift. By parameterizing the normal vector on the tangential plane, the normal factors are coupled with traditional reprojection factors in the pose optimization procedure. The experimental results demonstrate the effectiveness of the proposed system. The overall absolute trajectory error is improved by approximately 20%, which indicates that the estimated trajectory is much more accurate than that obtained using other state-of-the-art methods.
PT-ResNet: Perspective Transformation-Based Residual Network for Semantic Road Image Segmentation
Oct 29, 2019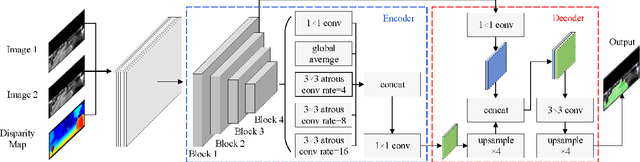
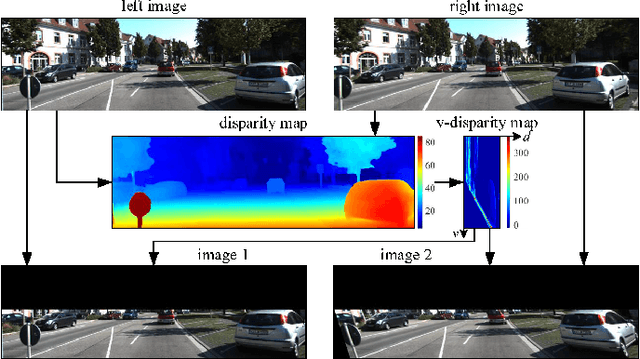
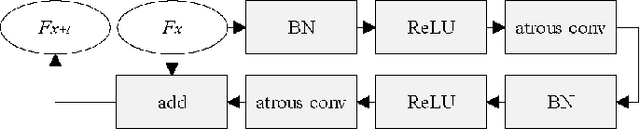
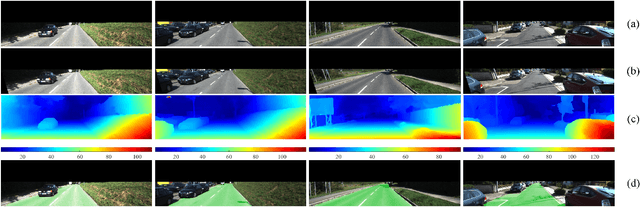
Semantic road region segmentation is a high-level task, which paves the way towards road scene understanding. This paper presents a residual network trained for semantic road segmentation. Firstly, we represent the projections of road disparities in the v-disparity map as a linear model, which can be estimated by optimizing the v-disparity map using dynamic programming. This linear model is then utilized to reduce the redundant information in the left and right road images. The right image is also transformed into the left perspective view, which greatly enhances the road surface similarity between the two images. Finally, the processed stereo images and their disparity maps are concatenated to create a set of 3D images, which are then utilized to train our neural network. The experimental results illustrate that our network achieves a maximum F1-measure of approximately 91.19% when analyzing the images from the KITTI road dataset.
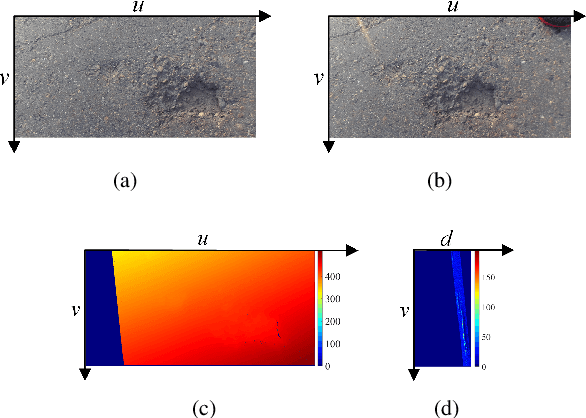
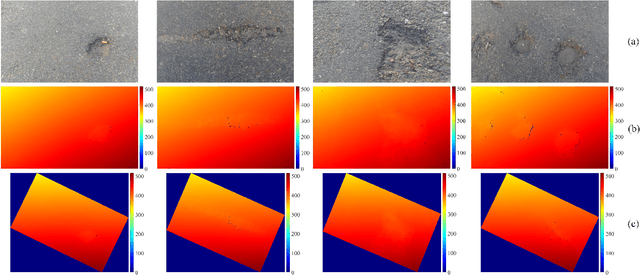
Pothole Detection Based on Disparity Transformation and Road Surface Modeling
Aug 02, 2019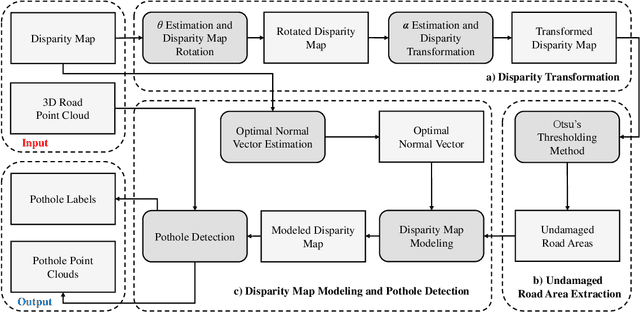

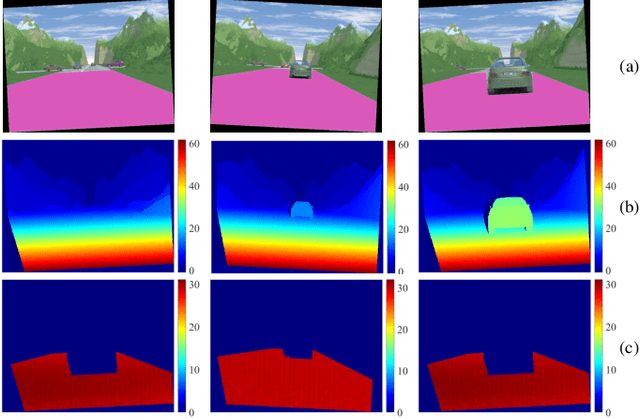
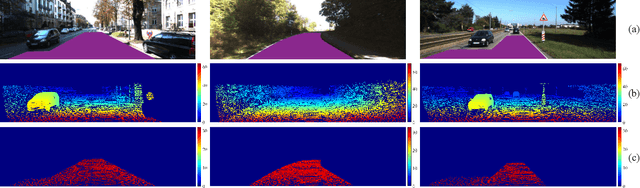
Pothole detection is one of the most important tasks for road maintenance. Computer vision approaches are generally based on either 2D road image analysis or 3D road surface modeling. However, these two categories are always used independently. Furthermore, the pothole detection accuracy is still far from satisfactory. Therefore, in this paper, we present a robust pothole detection algorithm that is both accurate and computationally efficient. A dense disparity map is first transformed to better distinguish between damaged and undamaged road areas. To achieve greater disparity transformation efficiency, golden section search and dynamic programming are utilized to estimate the transformation parameters. Otsu's thresholding method is then used to extract potential undamaged road areas from the transformed disparity map. The disparities in the extracted areas are modeled by a quadratic surface using least squares fitting. To improve disparity map modeling robustness, the surface normal is also integrated into the surface modeling process. Furthermore, random sample consensus is utilized to reduce the effects caused by outliers. By comparing the difference between the actual and modeled disparity maps, the potholes can be detected accurately. Finally, the point clouds of the detected potholes are extracted from the reconstructed 3D road surface. The experimental results show that the successful detection accuracy of the proposed system is around 98.7% and the overall pixel-level accuracy is approximately 99.6%.
Key Ingredients of Self-Driving Cars
Jun 07, 2019
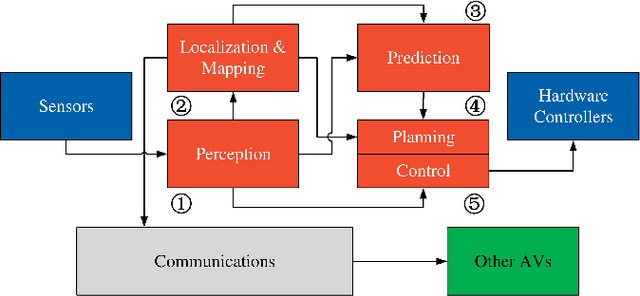
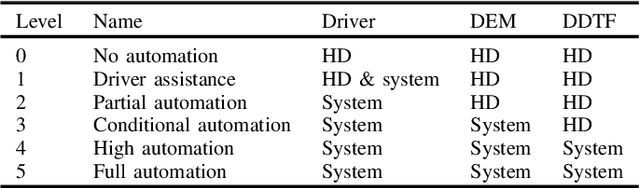
Over the past decade, many research articles have been published in the area of autonomous driving. However, most of them focus only on a specific technological area, such as visual environment perception, vehicle control, etc. Furthermore, due to fast advances in the self-driving car technology, such articles become obsolete very fast. In this paper, we give a brief but comprehensive overview on key ingredients of autonomous cars (ACs), including driving automation levels, AC sensors, AC software, open source datasets, industry leaders, AC applications and existing challenges.
A Robust Roll Angle Estimation Algorithm Based on Gradient Descent
Jun 05, 2019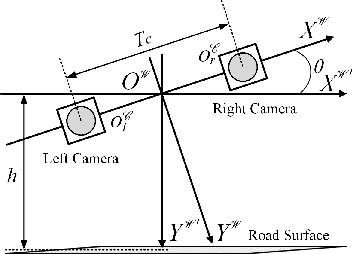
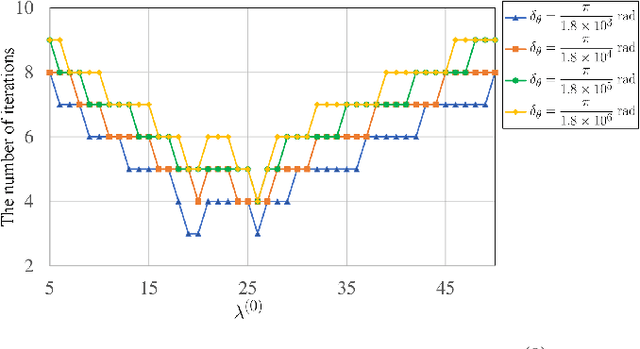
This paper presents a robust roll angle estimation algorithm, which is developed from our previously published work, where the roll angle was estimated from a dense disparity map by minimizing a global energy using golden section search algorithm. In this paper, to achieve greater computational efficiency, we utilize gradient descent to optimize the aforementioned global energy. The experimental results illustrate that the proposed roll angle estimation algorithm takes fewer iterations to achieve the same precision as the previous method.