 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRevisiting [CLS] and Patch Token Interaction in Vision Transformers
Feb 09, 2026Vision Transformers have emerged as powerful, scalable and versatile representation learners. To capture both global and local features, a learnable [CLS] class token is typically prepended to the input sequence of patch tokens. Despite their distinct nature, both token types are processed identically throughout the model. In this work, we investigate the friction between global and local feature learning under different pre-training strategies by analyzing the interactions between class and patch tokens. Our analysis reveals that standard normalization layers introduce an implicit differentiation between these token types. Building on this insight, we propose specialized processing paths that selectively disentangle the computational flow of class and patch tokens, particularly within normalization layers and early query-key-value projections. This targeted specialization leads to significantly improved patch representation quality for dense prediction tasks. Our experiments demonstrate segmentation performance gains of over 2 mIoU points on standard benchmarks, while maintaining strong classification accuracy. The proposed modifications introduce only an 8% increase in parameters, with no additional computational overhead. Through comprehensive ablations, we provide insights into which architectural components benefit most from specialization and how our approach generalizes across model scales and learning frameworks.
Disentangling the Factors of Convergence between Brains and Computer Vision Models
Aug 25, 2025Many AI models trained on natural images develop representations that resemble those of the human brain. However, the factors that drive this brain-model similarity remain poorly understood. To disentangle how the model, training and data independently lead a neural network to develop brain-like representations, we trained a family of self-supervised vision transformers (DINOv3) that systematically varied these different factors. We compare their representations of images to those of the human brain recorded with both fMRI and MEG, providing high resolution in spatial and temporal analyses. We assess the brain-model similarity with three complementary metrics focusing on overall representational similarity, topographical organization, and temporal dynamics. We show that all three factors - model size, training amount, and image type - independently and interactively impact each of these brain similarity metrics. In particular, the largest DINOv3 models trained with the most human-centric images reach the highest brain-similarity. This emergence of brain-like representations in AI models follows a specific chronology during training: models first align with the early representations of the sensory cortices, and only align with the late and prefrontal representations of the brain with considerably more training. Finally, this developmental trajectory is indexed by both structural and functional properties of the human cortex: the representations that are acquired last by the models specifically align with the cortical areas with the largest developmental expansion, thickness, least myelination, and slowest timescales. Overall, these findings disentangle the interplay between architecture and experience in shaping how artificial neural networks come to see the world as humans do, thus offering a promising framework to understand how the human brain comes to represent its visual world.
DINOv3
Aug 13, 2025Self-supervised learning holds the promise of eliminating the need for manual data annotation, enabling models to scale effortlessly to massive datasets and larger architectures. By not being tailored to specific tasks or domains, this training paradigm has the potential to learn visual representations from diverse sources, ranging from natural to aerial images -- using a single algorithm. This technical report introduces DINOv3, a major milestone toward realizing this vision by leveraging simple yet effective strategies. First, we leverage the benefit of scaling both dataset and model size by careful data preparation, design, and optimization. Second, we introduce a new method called Gram anchoring, which effectively addresses the known yet unsolved issue of dense feature maps degrading during long training schedules. Finally, we apply post-hoc strategies that further enhance our models' flexibility with respect to resolution, model size, and alignment with text. As a result, we present a versatile vision foundation model that outperforms the specialized state of the art across a broad range of settings, without fine-tuning. DINOv3 produces high-quality dense features that achieve outstanding performance on various vision tasks, significantly surpassing previous self- and weakly-supervised foundation models. We also share the DINOv3 suite of vision models, designed to advance the state of the art on a wide spectrum of tasks and data by providing scalable solutions for diverse resource constraints and deployment scenarios.
DINOv2 Meets Text: A Unified Framework for Image- and Pixel-Level Vision-Language Alignment
Dec 20, 2024



Self-supervised visual foundation models produce powerful embeddings that achieve remarkable performance on a wide range of downstream tasks. However, unlike vision-language models such as CLIP, self-supervised visual features are not readily aligned with language, hindering their adoption in open-vocabulary tasks. Our method, named dino.txt, unlocks this new ability for DINOv2, a widely used self-supervised visual encoder. We build upon the LiT training strategy, which trains a text encoder to align with a frozen vision model but leads to unsatisfactory results on dense tasks. We propose several key ingredients to improve performance on both global and dense tasks, such as concatenating the [CLS] token with the patch average to train the alignment and curating data using both text and image modalities. With these, we successfully train a CLIP-like model with only a fraction of the computational cost compared to CLIP while achieving state-of-the-art results in zero-shot classification and open-vocabulary semantic segmentation.
Automatic Data Curation for Self-Supervised Learning: A Clustering-Based Approach
May 24, 2024Self-supervised features are the cornerstone of modern machine learning systems. They are typically pre-trained on data collections whose construction and curation typically require extensive human effort. This manual process has some limitations similar to those encountered in supervised learning, e.g., the crowd-sourced selection of data is costly and time-consuming, preventing scaling the dataset size. In this work, we consider the problem of automatic curation of high-quality datasets for self-supervised pre-training. We posit that such datasets should be large, diverse and balanced, and propose a clustering-based approach for building ones satisfying all these criteria. Our method involves successive and hierarchical applications of $k$-means on a large and diverse data repository to obtain clusters that distribute uniformly among data concepts, followed by a hierarchical, balanced sampling step from these clusters. Extensive experiments on three different data domains including web-based images, satellite images and text show that features trained on our automatically curated datasets outperform those trained on uncurated data while being on par or better than ones trained on manually curated data.
Active Learning Strategies for Weakly-supervised Object Detection
Jul 25, 2022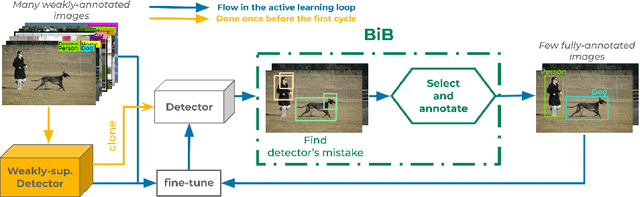
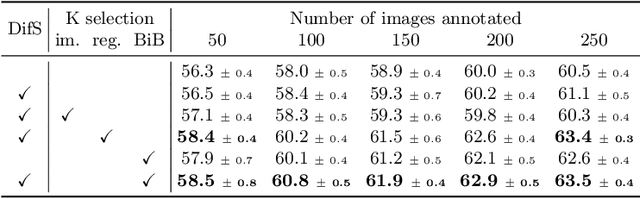

Object detectors trained with weak annotations are affordable alternatives to fully-supervised counterparts. However, there is still a significant performance gap between them. We propose to narrow this gap by fine-tuning a base pre-trained weakly-supervised detector with a few fully-annotated samples automatically selected from the training set using ``box-in-box'' (BiB), a novel active learning strategy designed specifically to address the well-documented failure modes of weakly-supervised detectors. Experiments on the VOC07 and COCO benchmarks show that BiB outperforms other active learning techniques and significantly improves the base weakly-supervised detector's performance with only a few fully-annotated images per class. BiB reaches 97% of the performance of fully-supervised Fast RCNN with only 10% of fully-annotated images on VOC07. On COCO, using on average 10 fully-annotated images per class, or equivalently 1% of the training set, BiB also reduces the performance gap (in AP) between the weakly-supervised detector and the fully-supervised Fast RCNN by over 70%, showing a good trade-off between performance and data efficiency. Our code is publicly available at https://github.com/huyvvo/BiB.
Localizing Objects with Self-Supervised Transformers and no Labels
Sep 29, 2021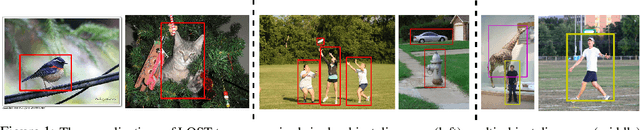
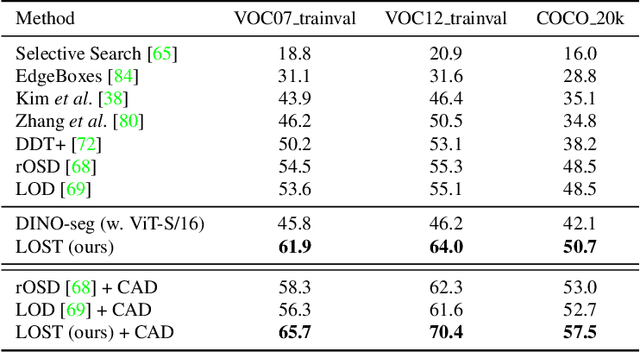
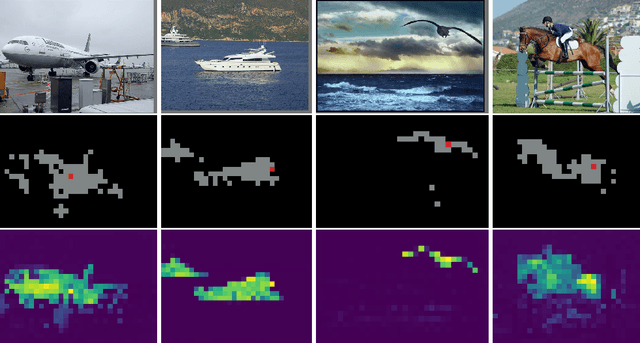
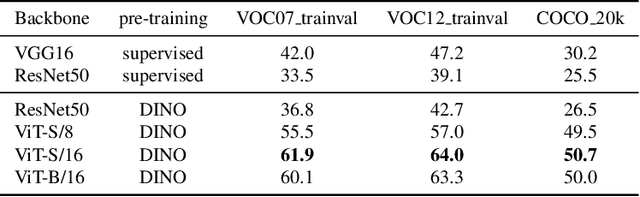
Localizing objects in image collections without supervision can help to avoid expensive annotation campaigns. We propose a simple approach to this problem, that leverages the activation features of a vision transformer pre-trained in a self-supervised manner. Our method, LOST, does not require any external object proposal nor any exploration of the image collection; it operates on a single image. Yet, we outperform state-of-the-art object discovery methods by up to 8 CorLoc points on PASCAL VOC 2012. We also show that training a class-agnostic detector on the discovered objects boosts results by another 7 points. Moreover, we show promising results on the unsupervised object discovery task. The code to reproduce our results can be found at https://github.com/valeoai/LOST.
Large-Scale Unsupervised Object Discovery
Jun 12, 2021
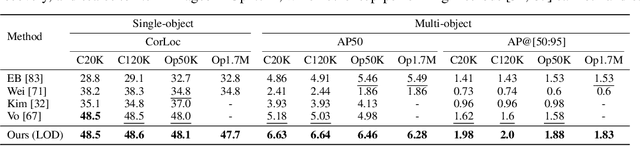
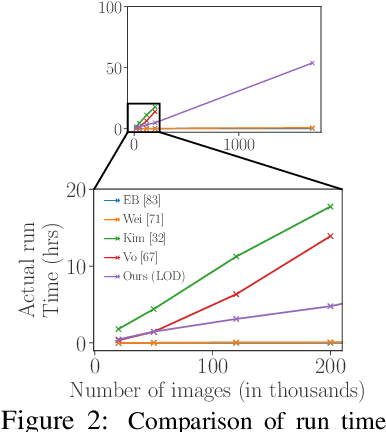
Existing approaches to unsupervised object discovery (UOD) do not scale up to large datasets without approximations which compromise their performance. We propose a novel formulation of UOD as a ranking problem, amenable to the arsenal of distributed methods available for eigenvalue problems and link analysis. Extensive experiments with COCO and OpenImages demonstrate that, in the single-object discovery setting where a single prominent object is sought in each image, the proposed LOD (Large-scale Object Discovery) approach is on par with, or better than the state of the art for medium-scale datasets (up to 120K images), and over 37% better than the only other algorithms capable of scaling up to 1.7M images. In the multi-object discovery setting where multiple objects are sought in each image, the proposed LOD is over 14% better in average precision (AP) than all other methods for datasets ranging from 20K to 1.7M images.
Toward unsupervised, multi-object discovery in large-scale image collections
Jul 06, 2020
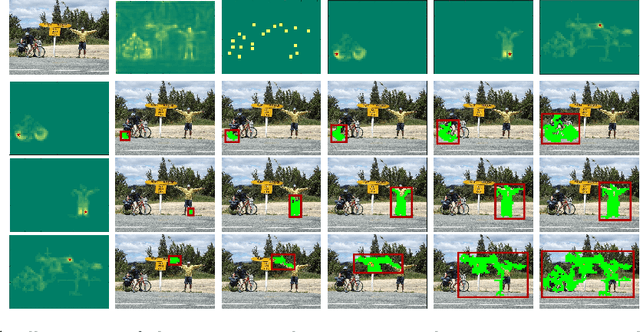
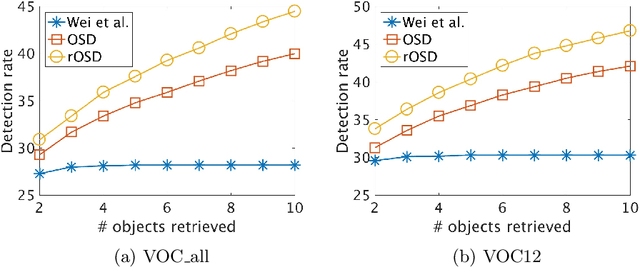
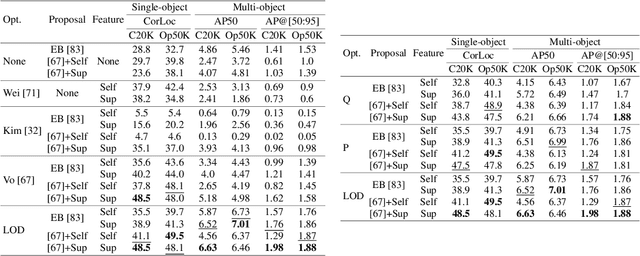
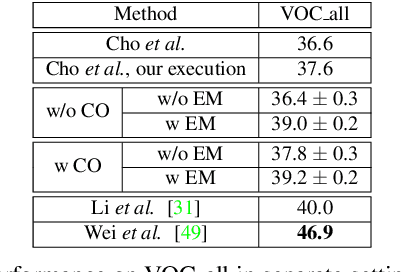
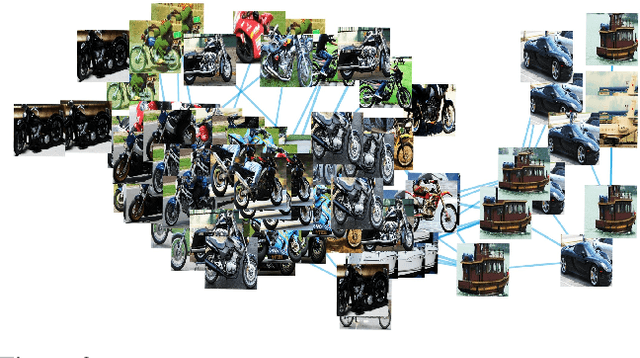
This paper addresses the problem of discovering the objects present in a collection of images without any supervision. We build on the optimization approach of Vo {\em et al.}~\cite{Vo2019UnsupOptim} with several key novelties: (1) We propose a novel saliency-based region proposal algorithm that achieves significantly higher overlap with ground-truth objects than other competitive methods. This procedure leverages off-the-shelf CNN features trained on classification tasks without any bounding box information, but is otherwise unsupervised. (2) We exploit the inherent hierarchical structure of proposals as an effective regularizer for the approach to object discovery of~\cite{Vo2019UnsupOptim}, boosting its performance to significantly improve over the state of the art on several standard benchmarks. (3) We adopt a two-stage strategy to select promising proposals using small random sets of images before using the whole image collection to discover the objects it depicts, allowing us to tackle, for the first time (to the best of our knowledge), the discovery of multiple objects in each one of the pictures making up datasets with up to 20,000 images, an over five-fold increase compared to existing methods, and a first step toward true large-scale unsupervised image interpretation.
Unsupervised Image Matching and Object Discovery as Optimization
Apr 05, 2019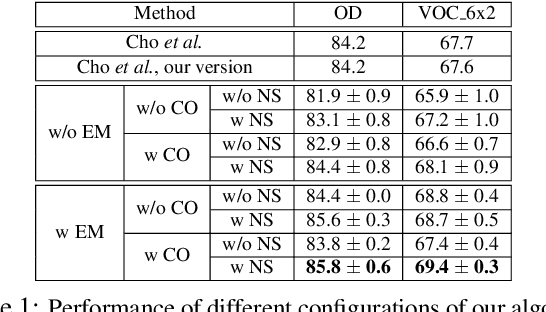
Learning with complete or partial supervision is powerful but relies on ever-growing human annotation efforts. As a way to mitigate this serious problem, as well as to serve specific applications, unsupervised learning has emerged as an important field of research. In computer vision, unsupervised learning comes in various guises. We focus here on the unsupervised discovery and matching of object categories among images in a collection, following the work of Cho et al. 2015. We show that the original approach can be reformulated and solved as a proper optimization problem. Experiments on several benchmarks establish the merit of our approach.