 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Llama 4 Herd: Architecture, Training, Evaluation, and Deployment Notes
Jan 15, 2026This document consolidates publicly reported technical details about Metas Llama 4 model family. It summarizes (i) released variants (Scout and Maverick) and the broader herd context including the previewed Behemoth teacher model, (ii) architectural characteristics beyond a high-level MoE description covering routed/shared-expert structure, early-fusion multimodality, and long-context design elements reported for Scout (iRoPE and length generalization strategies), (iii) training disclosures spanning pre-training, mid-training for long-context extension, and post-training methodology (lightweight SFT, online RL, and lightweight DPO) as described in release materials, (iv) developer-reported benchmark results for both base and instruction-tuned checkpoints, and (v) practical deployment constraints observed across major serving environments, including provider-specific context limits and quantization packaging. The manuscript also summarizes licensing obligations relevant to redistribution and derivative naming, and reviews publicly described safeguards and evaluation practices. The goal is to provide a compact technical reference for researchers and practitioners who need precise, source-backed facts about Llama 4.
The Llama 3 Herd of Models
Jul 31, 2024Modern artificial intelligence (AI) systems are powered by foundation models. This paper presents a new set of foundation models, called Llama 3. It is a herd of language models that natively support multilinguality, coding, reasoning, and tool usage. Our largest model is a dense Transformer with 405B parameters and a context window of up to 128K tokens. This paper presents an extensive empirical evaluation of Llama 3. We find that Llama 3 delivers comparable quality to leading language models such as GPT-4 on a plethora of tasks. We publicly release Llama 3, including pre-trained and post-trained versions of the 405B parameter language model and our Llama Guard 3 model for input and output safety. The paper also presents the results of experiments in which we integrate image, video, and speech capabilities into Llama 3 via a compositional approach. We observe this approach performs competitively with the state-of-the-art on image, video, and speech recognition tasks. The resulting models are not yet being broadly released as they are still under development.
Automatic Data Curation for Self-Supervised Learning: A Clustering-Based Approach
May 24, 2024Self-supervised features are the cornerstone of modern machine learning systems. They are typically pre-trained on data collections whose construction and curation typically require extensive human effort. This manual process has some limitations similar to those encountered in supervised learning, e.g., the crowd-sourced selection of data is costly and time-consuming, preventing scaling the dataset size. In this work, we consider the problem of automatic curation of high-quality datasets for self-supervised pre-training. We posit that such datasets should be large, diverse and balanced, and propose a clustering-based approach for building ones satisfying all these criteria. Our method involves successive and hierarchical applications of $k$-means on a large and diverse data repository to obtain clusters that distribute uniformly among data concepts, followed by a hierarchical, balanced sampling step from these clusters. Extensive experiments on three different data domains including web-based images, satellite images and text show that features trained on our automatically curated datasets outperform those trained on uncurated data while being on par or better than ones trained on manually curated data.
Code Llama: Open Foundation Models for Code
Aug 25, 2023



We release Code Llama, a family of large language models for code based on Llama 2 providing state-of-the-art performance among open models, infilling capabilities, support for large input contexts, and zero-shot instruction following ability for programming tasks. We provide multiple flavors to cover a wide range of applications: foundation models (Code Llama), Python specializations (Code Llama - Python), and instruction-following models (Code Llama - Instruct) with 7B, 13B and 34B parameters each. All models are trained on sequences of 16k tokens and show improvements on inputs with up to 100k tokens. 7B and 13B Code Llama and Code Llama - Instruct variants support infilling based on surrounding content. Code Llama reaches state-of-the-art performance among open models on several code benchmarks, with scores of up to 53% and 55% on HumanEval and MBPP, respectively. Notably, Code Llama - Python 7B outperforms Llama 2 70B on HumanEval and MBPP, and all our models outperform every other publicly available model on MultiPL-E. We release Code Llama under a permissive license that allows for both research and commercial use.
Llama 2: Open Foundation and Fine-Tuned Chat Models
Jul 19, 2023



In this work, we develop and release Llama 2, a collection of pretrained and fine-tuned large language models (LLMs) ranging in scale from 7 billion to 70 billion parameters. Our fine-tuned LLMs, called Llama 2-Chat, are optimized for dialogue use cases. Our models outperform open-source chat models on most benchmarks we tested, and based on our human evaluations for helpfulness and safety, may be a suitable substitute for closed-source models. We provide a detailed description of our approach to fine-tuning and safety improvements of Llama 2-Chat in order to enable the community to build on our work and contribute to the responsible development of LLMs.
LLaMA: Open and Efficient Foundation Language Models
Feb 27, 2023



We introduce LLaMA, a collection of foundation language models ranging from 7B to 65B parameters. We train our models on trillions of tokens, and show that it is possible to train state-of-the-art models using publicly available datasets exclusively, without resorting to proprietary and inaccessible datasets. In particular, LLaMA-13B outperforms GPT-3 (175B) on most benchmarks, and LLaMA-65B is competitive with the best models, Chinchilla-70B and PaLM-540B. We release all our models to the research community.
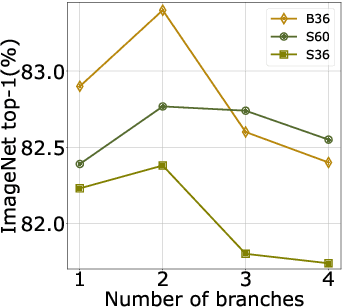
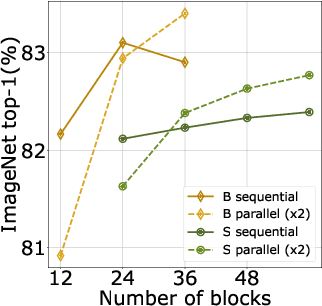
Co-training $2^L$ Submodels for Visual Recognition
Dec 09, 2022We introduce submodel co-training, a regularization method related to co-training, self-distillation and stochastic depth. Given a neural network to be trained, for each sample we implicitly instantiate two altered networks, ``submodels'', with stochastic depth: we activate only a subset of the layers. Each network serves as a soft teacher to the other, by providing a loss that complements the regular loss provided by the one-hot label. Our approach, dubbed cosub, uses a single set of weights, and does not involve a pre-trained external model or temporal averaging. Experimentally, we show that submodel co-training is effective to train backbones for recognition tasks such as image classification and semantic segmentation. Our approach is compatible with multiple architectures, including RegNet, ViT, PiT, XCiT, Swin and ConvNext. Our training strategy improves their results in comparable settings. For instance, a ViT-B pretrained with cosub on ImageNet-21k obtains 87.4% top-1 acc. @448 on ImageNet-val.
DeiT III: Revenge of the ViT
Apr 14, 2022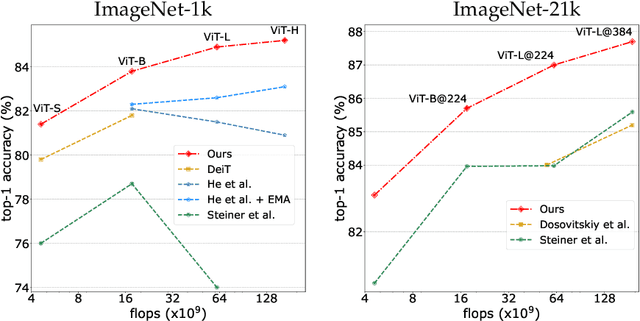



A Vision Transformer (ViT) is a simple neural architecture amenable to serve several computer vision tasks. It has limited built-in architectural priors, in contrast to more recent architectures that incorporate priors either about the input data or of specific tasks. Recent works show that ViTs benefit from self-supervised pre-training, in particular BerT-like pre-training like BeiT. In this paper, we revisit the supervised training of ViTs. Our procedure builds upon and simplifies a recipe introduced for training ResNet-50. It includes a new simple data-augmentation procedure with only 3 augmentations, closer to the practice in self-supervised learning. Our evaluations on Image classification (ImageNet-1k with and without pre-training on ImageNet-21k), transfer learning and semantic segmentation show that our procedure outperforms by a large margin previous fully supervised training recipes for ViT. It also reveals that the performance of our ViT trained with supervision is comparable to that of more recent architectures. Our results could serve as better baselines for recent self-supervised approaches demonstrated on ViT.
Three things everyone should know about Vision Transformers
Mar 18, 2022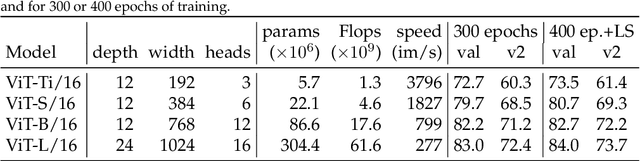
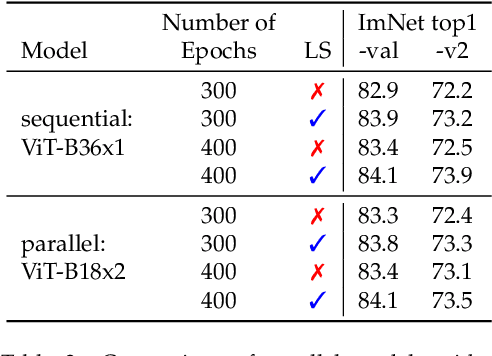
After their initial success in natural language processing, transformer architectures have rapidly gained traction in computer vision, providing state-of-the-art results for tasks such as image classification, detection, segmentation, and video analysis. We offer three insights based on simple and easy to implement variants of vision transformers. (1) The residual layers of vision transformers, which are usually processed sequentially, can to some extent be processed efficiently in parallel without noticeably affecting the accuracy. (2) Fine-tuning the weights of the attention layers is sufficient to adapt vision transformers to a higher resolution and to other classification tasks. This saves compute, reduces the peak memory consumption at fine-tuning time, and allows sharing the majority of weights across tasks. (3) Adding MLP-based patch pre-processing layers improves Bert-like self-supervised training based on patch masking. We evaluate the impact of these design choices using the ImageNet-1k dataset, and confirm our findings on the ImageNet-v2 test set. Transfer performance is measured across six smaller datasets.
Augmenting Convolutional networks with attention-based aggregation
Dec 27, 2021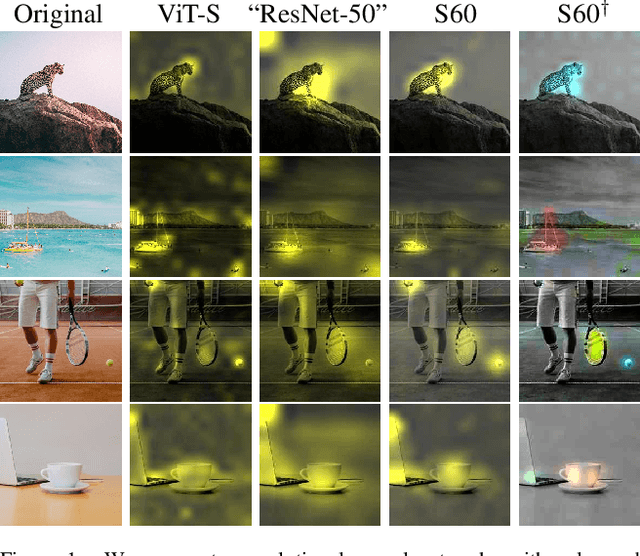
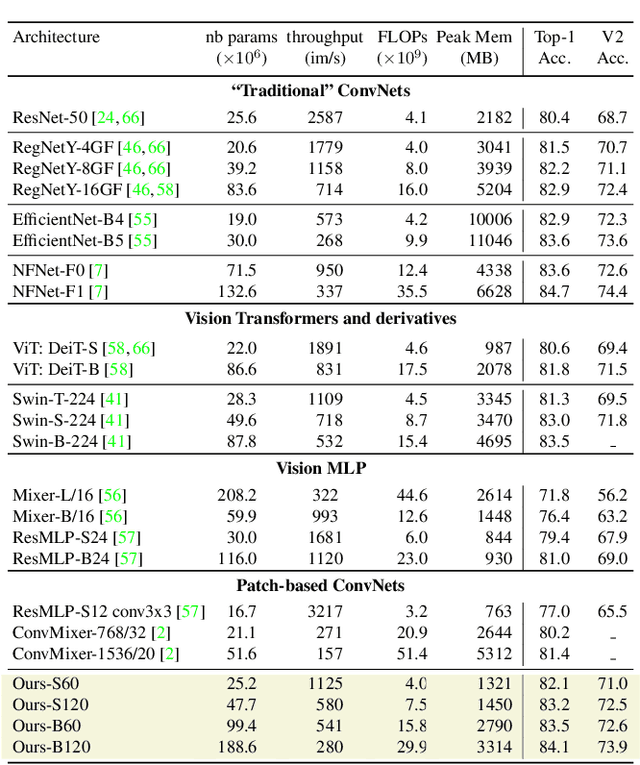
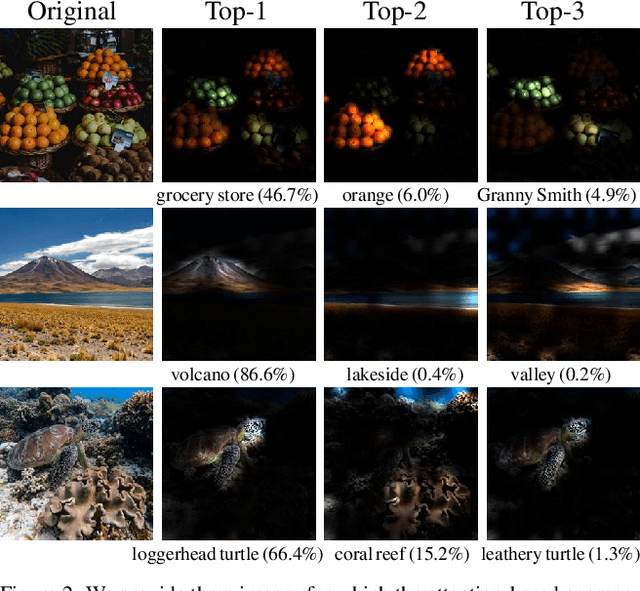
We show how to augment any convolutional network with an attention-based global map to achieve non-local reasoning. We replace the final average pooling by an attention-based aggregation layer akin to a single transformer block, that weights how the patches are involved in the classification decision. We plug this learned aggregation layer with a simplistic patch-based convolutional network parametrized by 2 parameters (width and depth). In contrast with a pyramidal design, this architecture family maintains the input patch resolution across all the layers. It yields surprisingly competitive trade-offs between accuracy and complexity, in particular in terms of memory consumption, as shown by our experiments on various computer vision tasks: object classification, image segmentation and detection.