 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Prediction for Pulsar Noise with Long Short-Term Memory Network
Jun 02, 2026This work proposes a novel solution to predict pulsar timing residuals with limited data, addressing the critical challenge of data scarcity across spin-frequency subgroups of millisecond pulsars in PTA datasets. The proposed solution applies a Long Short-Term Memory (LSTM) network optimized using the model-agnostic meta-learning algorithm, enabling rapid adaptation to new frequency domain by fine-tuning the LSTM network with only a few-shot of ground truth timing residuals. Particle swarm optimization algorithm is also used for automatic hyperparameter optimization, leading to improved prediction accuracy. Our solution, evaluated on the second data release of the International Pulsar Timing Array (IPTA), demonstrates robust generalization with accurate predictions in three metrics across high-frequency test frequency domains, while requiring only 10% of the timing residuals from these domains for model fine-tuning. Furthermore, our lightweight structure only costs 16.86 MB CPU memory and 18 milliseconds for single-step residual prediction. All these characteristics make our solution highly suitable for real-world applications, where effective and real-time predictions of pulsar timing residuals are essential-particularly in resource-constrained environments with limited computational power, memory, or energy availability.
TED: Training-Free Experience Distillation for Multimodal Reasoning
Mar 25, 2026Knowledge distillation is typically realized by transferring a teacher model's knowledge into a student's parameters through supervised or reinforcement-based optimization. While effective, such approaches require repeated parameter updates and large-scale training data, limiting their applicability in resource-constrained environments. In this work, we propose TED, a training-free, context-based distillation framework that shifts the update target of distillation from model parameters to an in-context experience injected into the student's prompt. For each input, the student generates multiple reasoning trajectories, while a teacher independently produces its own solution. The teacher then compares the student trajectories with its reasoning and the ground-truth answer, extracting generalized experiences that capture effective reasoning patterns. These experiences are continuously refined and updated over time. A key challenge of context-based distillation is unbounded experience growth and noise accumulation. TED addresses this with an experience compression mechanism that tracks usage statistics and selectively merges, rewrites, or removes low-utility experiences. Experiments on multimodal reasoning benchmarks MathVision and VisualPuzzles show that TED consistently improves performance. On MathVision, TED raises the performance of Qwen3-VL-8B from 0.627 to 0.702, and on VisualPuzzles from 0.517 to 0.561 with just 100 training samples. Under this low-data, no-update setting, TED achieves performance competitive with fully trained parameter-based distillation while reducing training cost by over 5x, demonstrating that meaningful knowledge transfer can be achieved through contextual experience.
Graph Attention-based Decentralized Actor-Critic for Dual-Objective Control of Multi-UAV Swarms
Jun 10, 2025This research focuses on optimizing multi-UAV systems with dual objectives: maximizing service coverage as the primary goal while extending battery lifetime as the secondary objective. We propose a Graph Attention-based Decentralized Actor-Critic (GADC) to optimize the dual objectives. The proposed approach leverages a graph attention network to process UAVs' limited local observation and reduce the dimension of the environment states. Subsequently, an actor-double-critic network is developed to manage dual policies for joint objective optimization. The proposed GADC uses a Kullback-Leibler (KL) divergence factor to balance the tradeoff between coverage performance and battery lifetime in the multi-UAV system. We assess the scalability and efficiency of GADC through comprehensive benchmarking against state-of-the-art methods, considering both theory and experimental aspects. Extensive testing in both ideal settings and NVIDIA Sionna's realistic ray tracing environment demonstrates GADC's superior performance.
MCTS-SQL: An Effective Framework for Text-to-SQL with Monte Carlo Tree Search
Jan 28, 2025



Text-to-SQL is a fundamental and longstanding problem in the NLP area, aiming at converting natural language queries into SQL, enabling non-expert users to operate databases. Recent advances in LLM have greatly improved text-to-SQL performance. However, challenges persist, especially when dealing with complex user queries. Current approaches (e.g., COT prompting and multi-agent frameworks) rely on the ability of models to plan and generate SQL autonomously, but controlling performance remains difficult. In addition, LLMs are still prone to hallucinations. To alleviate these challenges, we designed a novel MCTS-SQL to guide SQL generation iteratively. The approach generates SQL queries through Monte Carlo Tree Search (MCTS) and a heuristic self-refinement mechanism are used to enhance accuracy and reliability. Key components include a schema selector for extracting relevant information and an MCTS-based generator for iterative query refinement. Experimental results from the SPIDER and BIRD benchmarks show that MCTS-SQL achieves state-of-the-art performance. Specifically, on the BIRD development dataset, MCTS-SQL achieves an Execution (EX) accuracy of 69.40% using GPT-4o as the base model and a significant improvement when dealing with challenging tasks, with an EX of 51.48%, which is 3.41% higher than the existing method.
The Multi-Modal Video Reasoning and Analyzing Competition
Aug 18, 2021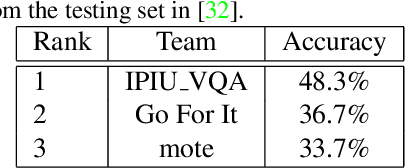
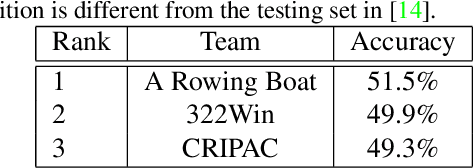
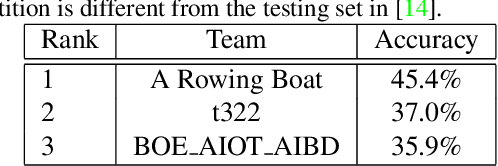
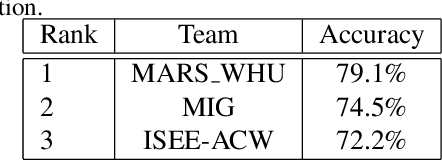
In this paper, we introduce the Multi-Modal Video Reasoning and Analyzing Competition (MMVRAC) workshop in conjunction with ICCV 2021. This competition is composed of four different tracks, namely, video question answering, skeleton-based action recognition, fisheye video-based action recognition, and person re-identification, which are based on two datasets: SUTD-TrafficQA and UAV-Human. We summarize the top-performing methods submitted by the participants in this competition and show their results achieved in the competition.
A Predictive On-Demand Placement of UAV Base Stations Using Echo State Network
Oct 06, 2019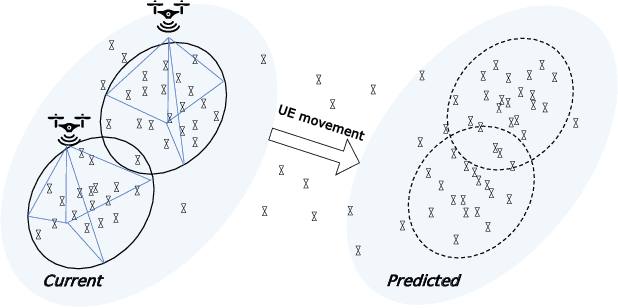
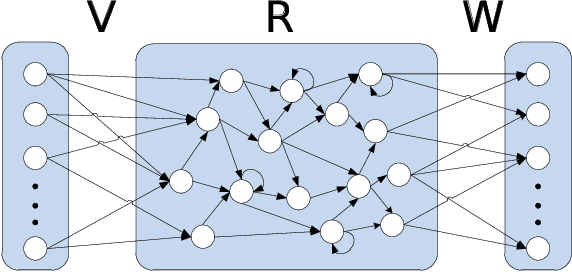
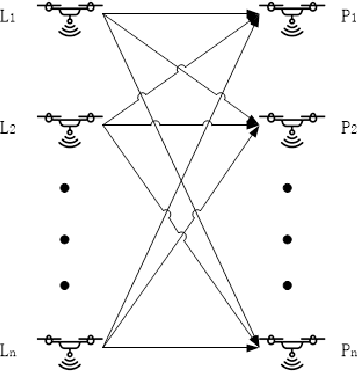
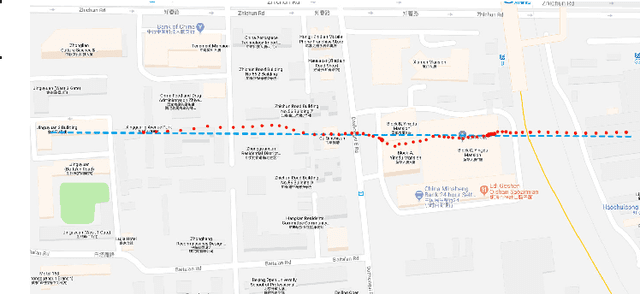
The unmanned aerial vehicles base stations (UAV-BSs) have great potential in being widely used in many dynamic application scenarios. In those scenarios, the movements of served user equipments (UEs) are inevitable, so the UAV-BSs needs to be re-positioned dynamically for providing seamless services. In this paper, we propose a system framework consisting of UEs clustering, UAV-BS placement, UEs trajectories prediction, and UAV-BS reposition matching scheme, to serve the UEs seamlessly as well as minimize the energy cost of UAV-BSs' reposition trajectories. An Echo State Network (ESN) based algorithm for predicting the future trajectories of UEs and a Kuhn-Munkres-based algorithm for finding the energy-efficient reposition trajectories of UAV-BSs is designed, respectively. We conduct a simulation using a real open dataset for performance validation. The simulation results indicate that the proposed framework achieves high prediction accuracy and provides the energy-efficient matching scheme.