 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Arena: Crowdsourcing Data Generation through Interactive Competition
Apr 20, 2026Post-training Large Language Models requires diverse, high-quality data which is rare and costly to obtain, especially in low resource domains and for multi-turn conversations. Common solutions are crowdsourcing or synthetic generation, but both often yield low-quality or low-diversity data. We introduce Adversarial Arena for building high quality conversational datasets by framing data generation as an adversarial task: attackers create prompts, and defenders generate responses. This interactive competition between multiple teams naturally produces diverse and complex data. We validated this approach by conducting a competition with 10 academic teams from top US and European universities, each building attacker or defender bots. The competition, focused on safety alignment of LLMs in cybersecurity, generated 19,683 multi-turn conversations. Fine-tuning an open-source model on this dataset produced an 18.47% improvement in secure code generation on CyberSecEval-Instruct and 29.42% improvement on CyberSecEval-MITRE.
Amazon Nova AI Challenge -- Trusted AI: Advancing secure, AI-assisted software development
Aug 13, 2025AI systems for software development are rapidly gaining prominence, yet significant challenges remain in ensuring their safety. To address this, Amazon launched the Trusted AI track of the Amazon Nova AI Challenge, a global competition among 10 university teams to drive advances in secure AI. In the challenge, five teams focus on developing automated red teaming bots, while the other five create safe AI assistants. This challenge provides teams with a unique platform to evaluate automated red-teaming and safety alignment methods through head-to-head adversarial tournaments where red teams have multi-turn conversations with the competing AI coding assistants to test their safety alignment. Along with this, the challenge provides teams with a feed of high quality annotated data to fuel iterative improvement. Throughout the challenge, teams developed state-of-the-art techniques, introducing novel approaches in reasoning-based safety alignment, robust model guardrails, multi-turn jail-breaking, and efficient probing of large language models (LLMs). To support these efforts, the Amazon Nova AI Challenge team made substantial scientific and engineering investments, including building a custom baseline coding specialist model for the challenge from scratch, developing a tournament orchestration service, and creating an evaluation harness. This paper outlines the advancements made by university teams and the Amazon Nova AI Challenge team in addressing the safety challenges of AI for software development, highlighting this collaborative effort to raise the bar for AI safety.
Mastering Robot Manipulation with Multimodal Prompts through Pretraining and Multi-task Fine-tuning
Oct 14, 2023



Prompt-based learning has been demonstrated as a compelling paradigm contributing to large language models' tremendous success (LLMs). Inspired by their success in language tasks, existing research has leveraged LLMs in embodied instruction following and task planning. However, not much attention has been paid to embodied tasks with multimodal prompts, combining vision signals with text descriptions. This type of task poses a major challenge to robots' capability to understand the interconnection and complementarity between vision and language signals. In this work, we introduce an effective framework that learns a policy to perform robot manipulation with multimodal prompts from multi-task expert trajectories. Our methods consist of a two-stage training pipeline that performs inverse dynamics pretraining and multi-task finetuning. To facilitate multimodal understanding, we design our multimodal prompt encoder by augmenting a pretrained LM with a residual connection to the visual input and model the dependencies among action dimensions. Empirically, we evaluate the efficacy of our method on the VIMA-BENCH and establish a new state-of-the-art (10% improvement in success rate). Moreover, we demonstrate that our model exhibits remarkable in-context learning ability.
Alexa, play with robot: Introducing the First Alexa Prize SimBot Challenge on Embodied AI
Aug 09, 2023



The Alexa Prize program has empowered numerous university students to explore, experiment, and showcase their talents in building conversational agents through challenges like the SocialBot Grand Challenge and the TaskBot Challenge. As conversational agents increasingly appear in multimodal and embodied contexts, it is important to explore the affordances of conversational interaction augmented with computer vision and physical embodiment. This paper describes the SimBot Challenge, a new challenge in which university teams compete to build robot assistants that complete tasks in a simulated physical environment. This paper provides an overview of the SimBot Challenge, which included both online and offline challenge phases. We describe the infrastructure and support provided to the teams including Alexa Arena, the simulated environment, and the ML toolkit provided to teams to accelerate their building of vision and language models. We summarize the approaches the participating teams took to overcome research challenges and extract key lessons learned. Finally, we provide analysis of the performance of the competing SimBots during the competition.
Alexa Arena: A User-Centric Interactive Platform for Embodied AI
Mar 02, 2023



We introduce Alexa Arena, a user-centric simulation platform for Embodied AI (EAI) research. Alexa Arena provides a variety of multi-room layouts and interactable objects, for the creation of human-robot interaction (HRI) missions. With user-friendly graphics and control mechanisms, Alexa Arena supports the development of gamified robotic tasks readily accessible to general human users, thus opening a new venue for high-efficiency HRI data collection and EAI system evaluation. Along with the platform, we introduce a dialog-enabled instruction-following benchmark and provide baseline results for it. We make Alexa Arena publicly available to facilitate research in building generalizable and assistive embodied agents.
Alexa, Let's Work Together: Introducing the First Alexa Prize TaskBot Challenge on Conversational Task Assistance
Sep 13, 2022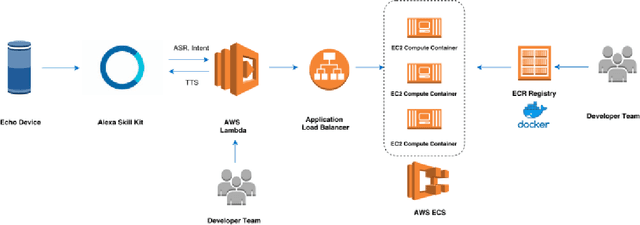
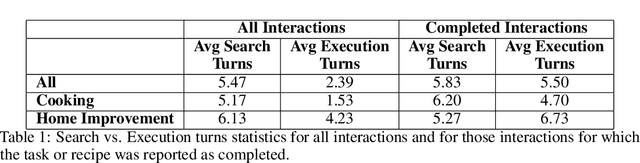
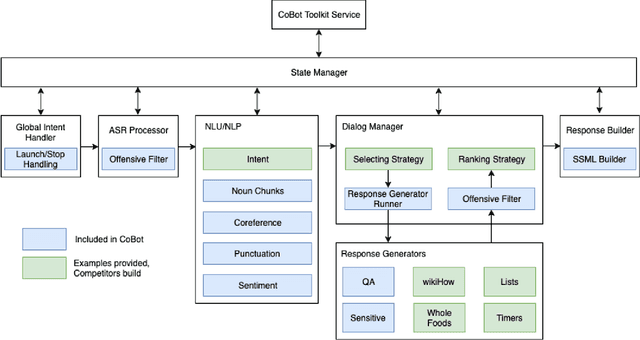
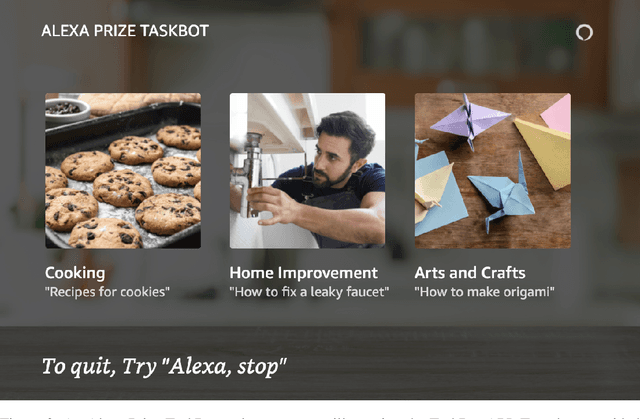
Since its inception in 2016, the Alexa Prize program has enabled hundreds of university students to explore and compete to develop conversational agents through the SocialBot Grand Challenge. The goal of the challenge is to build agents capable of conversing coherently and engagingly with humans on popular topics for 20 minutes, while achieving an average rating of at least 4.0/5.0. However, as conversational agents attempt to assist users with increasingly complex tasks, new conversational AI techniques and evaluation platforms are needed. The Alexa Prize TaskBot challenge, established in 2021, builds on the success of the SocialBot challenge by introducing the requirements of interactively assisting humans with real-world Cooking and Do-It-Yourself tasks, while making use of both voice and visual modalities. This challenge requires the TaskBots to identify and understand the user's need, identify and integrate task and domain knowledge into the interaction, and develop new ways of engaging the user without distracting them from the task at hand, among other challenges. This paper provides an overview of the TaskBot challenge, describes the infrastructure support provided to the teams with the CoBot Toolkit, and summarizes the approaches the participating teams took to overcome the research challenges. Finally, it analyzes the performance of the competing TaskBots during the first year of the competition.