 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-modal Retrieval Models for Stripped Binary Analysis
Dec 11, 2025



LLM-agent based binary code analysis has demonstrated significant potential across a wide range of software security scenarios, including vulnerability detection, malware analysis, etc. In agent workflow, however, retrieving the positive from thousands of stripped binary functions based on user query remains under-studied and challenging, as the absence of symbolic information distinguishes it from source code retrieval. In this paper, we introduce, BinSeek, the first two-stage cross-modal retrieval framework for stripped binary code analysis. It consists of two models: BinSeekEmbedding is trained on large-scale dataset to learn the semantic relevance of the binary code and the natural language description, furthermore, BinSeek-Reranker learns to carefully judge the relevance of the candidate code to the description with context augmentation. To this end, we built an LLM-based data synthesis pipeline to automate training construction, also deriving a domain benchmark for future research. Our evaluation results show that BinSeek achieved the state-of-the-art performance, surpassing the the same scale models by 31.42% in Rec@3 and 27.17% in MRR@3, as well as leading the advanced general-purpose models that have 16 times larger parameters.
AutoPT: How Far Are We from the End2End Automated Web Penetration Testing?
Nov 02, 2024



Penetration testing is essential to ensure Web security, which can detect and fix vulnerabilities in advance, and prevent data leakage and serious consequences. The powerful inference capabilities of large language models (LLMs) have made significant progress in various fields, and the development potential of LLM-based agents can revolutionize the cybersecurity penetration testing industry. In this work, we establish a comprehensive end-to-end penetration testing benchmark using a real-world penetration testing environment to explore the capabilities of LLM-based agents in this domain. Our results reveal that the agents are familiar with the framework of penetration testing tasks, but they still face limitations in generating accurate commands and executing complete processes. Accordingly, we summarize the current challenges, including the difficulty of maintaining the entire message history and the tendency for the agent to become stuck. Based on the above insights, we propose a Penetration testing State Machine (PSM) that utilizes the Finite State Machine (FSM) methodology to address these limitations. Then, we introduce AutoPT, an automated penetration testing agent based on the principle of PSM driven by LLMs, which utilizes the inherent inference ability of LLM and the constraint framework of state machines. Our evaluation results show that AutoPT outperforms the baseline framework ReAct on the GPT-4o mini model and improves the task completion rate from 22% to 41% on the benchmark target. Compared with the baseline framework and manual work, AutoPT also reduces time and economic costs further. Hence, our AutoPT has facilitated the development of automated penetration testing and significantly impacted both academia and industry.
GPT Paternity Test: GPT Generated Text Detection with GPT Genetic Inheritance
May 21, 2023



Large Language Models (LLMs) can generate texts that carry the risk of various misuses, including plagiarism, planting fake reviews on e-commerce platforms, or creating fake social media postings that can sway election results. Detecting whether a text is machine-generated has thus become increasingly important. While machine-learning-based detection strategies exhibit superior performance, they often lack generalizability, limiting their practicality. In this work, we introduce GPT Paternity Test (GPT-Pat), which reliably detects machine-generated text across varied datasets. Given a text under scrutiny, we leverage ChatGPT to generate a corresponding question and provide a re-answer to the question. By comparing the similarity between the original text and the generated re-answered text, it can be determined whether the text is machine-generated. GPT-Pat consists of a Siamese network to compute the similarity between the original text and the generated re-answered text and a binary classifier. Our method achieved an average accuracy of 94.57% on four generalization test sets, surpassing the state-of-the-art RoBERTa-based method by 12.34%. The accuracy drop of our method is only about half of that of the RoBERTa-based method when it is attacked by re-translation and polishing.
Agent with Tangent-based Formulation and Anatomical Perception for Standard Plane Localization in 3D Ultrasound
Jul 01, 2022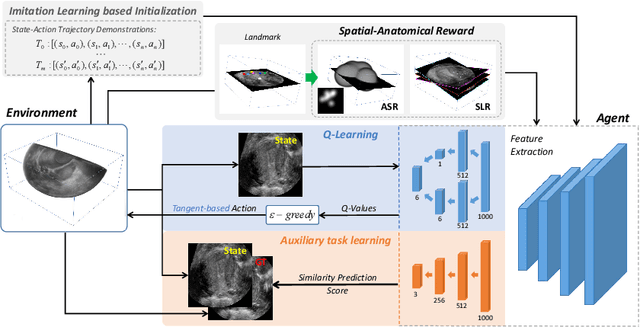
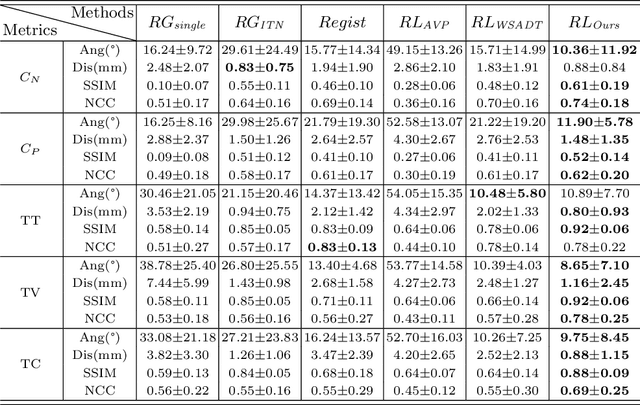
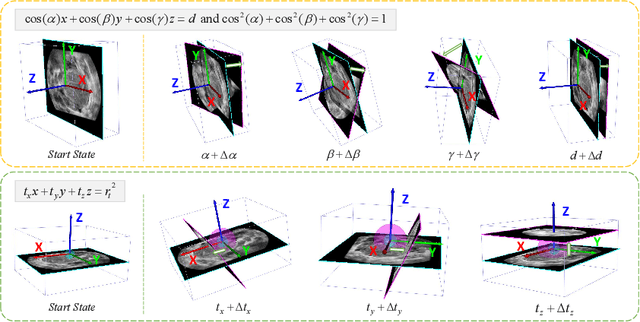
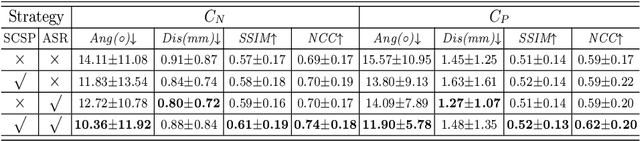
Standard plane (SP) localization is essential in routine clinical ultrasound (US) diagnosis. Compared to 2D US, 3D US can acquire multiple view planes in one scan and provide complete anatomy with the addition of coronal plane. However, manually navigating SPs in 3D US is laborious and biased due to the orientation variability and huge search space. In this study, we introduce a novel reinforcement learning (RL) framework for automatic SP localization in 3D US. Our contribution is three-fold. First, we formulate SP localization in 3D US as a tangent-point-based problem in RL to restructure the action space and significantly reduce the search space. Second, we design an auxiliary task learning strategy to enhance the model's ability to recognize subtle differences crossing Non-SPs and SPs in plane search. Finally, we propose a spatial-anatomical reward to effectively guide learning trajectories by exploiting spatial and anatomical information simultaneously. We explore the efficacy of our approach on localizing four SPs on uterus and fetal brain datasets. The experiments indicate that our approach achieves a high localization accuracy as well as robust performance.