 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous-time State & Dynamics Estimation using a Pseudo-Spectral Parameterization
Mar 26, 2021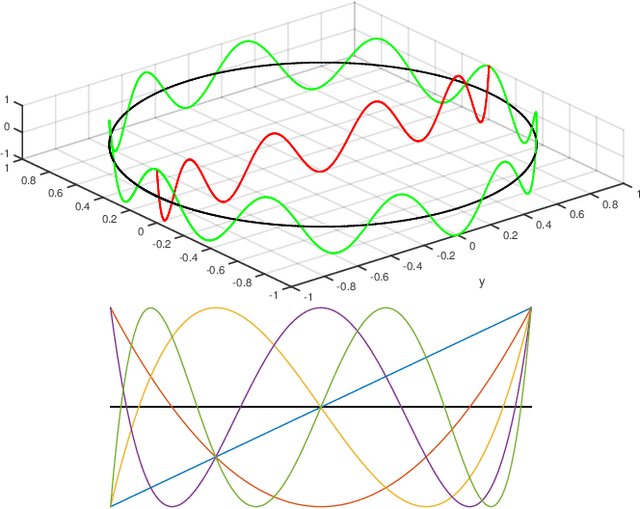
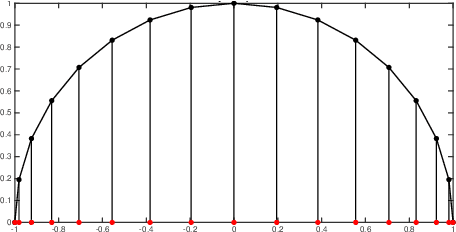
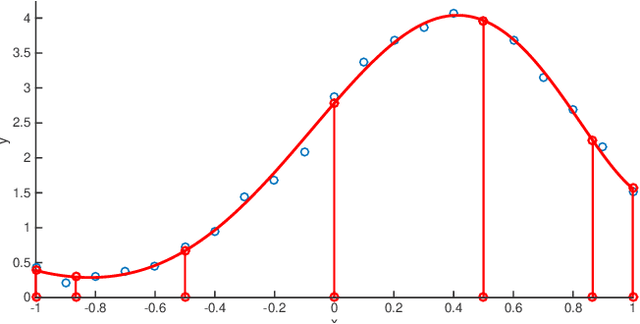
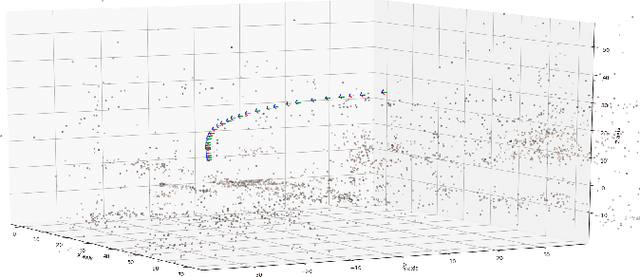
We present a novel continuous time trajectory representation based on a Chebyshev polynomial basis, which when governed by known dynamics models, allows for full trajectory and robot dynamics estimation, particularly useful for high-performance robotics applications such as unmanned aerial vehicles. We show that we can gracefully incorporate model dynamics to our trajectory representation, within a factor-graph based framework, and leverage ideas from pseudo-spectral optimal control to parameterize the state and the control trajectories as interpolating polynomials. This allows us to perform efficient optimization at specifically chosen points derived from the theory, while recovering full trajectory estimates. Through simulated experiments we demonstrate the applicability of our representation for accurate flight dynamics estimation for multirotor aerial vehicles. The representation framework is general and can thus be applied to a multitude of high-performance applications beyond multirotor platforms.
iMHS: An Incremental Multi-Hypothesis Smoother
Mar 24, 2021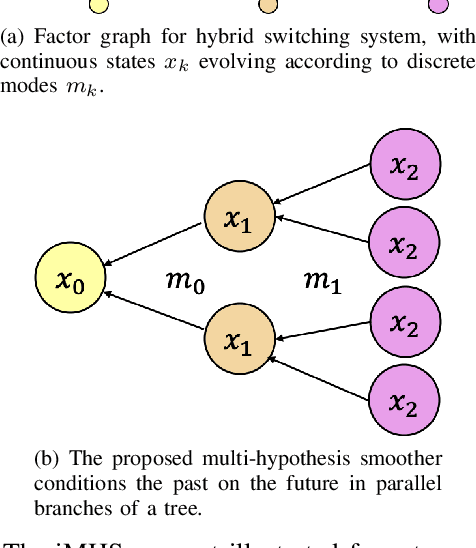
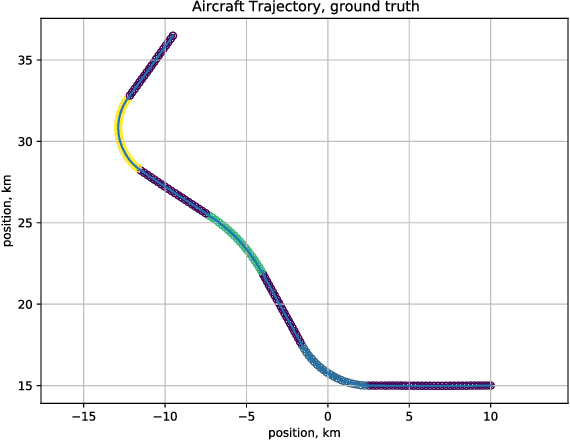
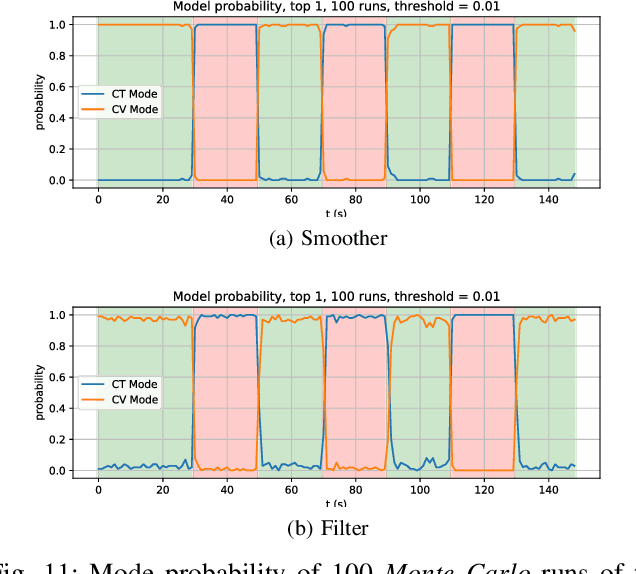
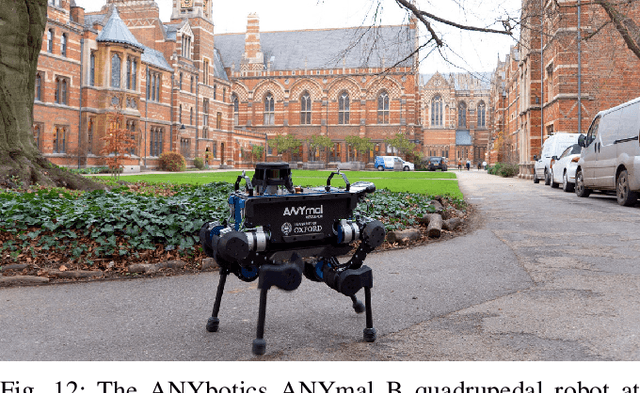
State estimation of multi-modal hybrid systems is an important problem with many applications in the field robotics. However, incorporating discrete modes in the estimation process is hampered by a potentially combinatorial growth in computation. In this paper we present a novel incremental multi-hypothesis smoother based on eliminating a hybrid factor graph into a multi-hypothesis Bayes tree, which represents possible discrete state sequence hypotheses. Following iSAM, we enable incremental inference by conditioning the past on the future but we add to that the capability of maintaining multiple discrete mode histories, exploiting the temporal structure of the problem to obtain a simplified representation that unifies the multiple hypothesis tree with the Bayes tree. In the results section we demonstrate the generality of the algorithm with examples in three problem domains: lane change detection (1D), aircraft maneuver detection (2D), and contact detection in legged robots (3D).
Neural Volume Rendering: NeRF And Beyond
Jan 14, 2021Besides the COVID-19 pandemic and political upheaval in the US, 2020 was also the year in which neural volume rendering exploded onto the scene, triggered by the impressive NeRF paper by Mildenhall et al. (2020). Both of us have tried to capture this excitement, Frank on a blog post (Dellaert, 2020) and Yen-Chen in a Github collection (Yen-Chen, 2020). This note is an annotated bibliography of the relevant papers, and we posted the associated bibtex file on the repository.
A Factor-Graph Approach for Optimization Problems with Dynamics Constraints
Nov 11, 2020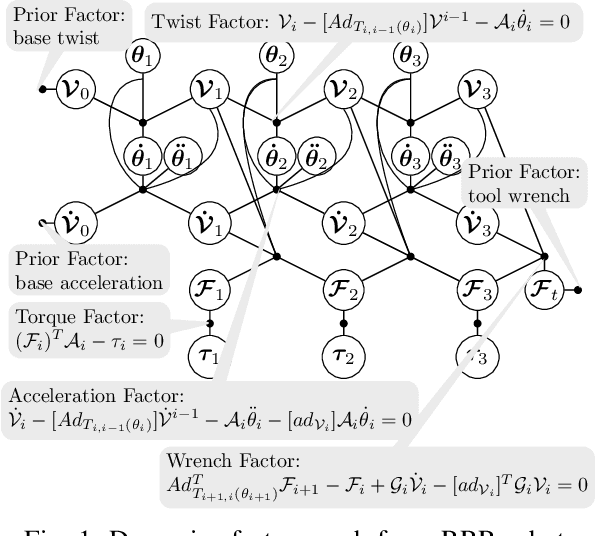
In this paper, we introduce dynamics factor graphs as a graphical framework to solve dynamics problems and kinodynamic motion planning problems with full consideration of whole-body dynamics and contacts. A factor graph representation of dynamics problems provides an insightful visualization of their mathematical structure and can be used in conjunction with sparse nonlinear optimizers to solve challenging, high-dimensional optimization problems in robotics. We can easily formulate kinodynamic motion planning as a trajectory optimization problem with factor graphs. We demonstrate the flexibility and descriptive power of dynamics factor graphs by applying them to control various dynamical systems, ranging from a simple cart pole to a 12-DoF quadrupedal robot.
Equality Constrained Linear Optimal Control With Factor Graphs
Nov 02, 2020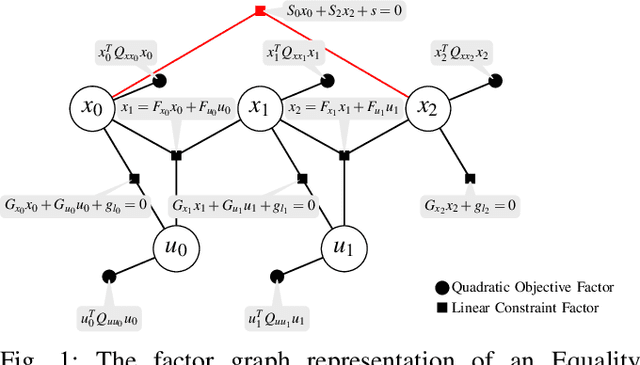
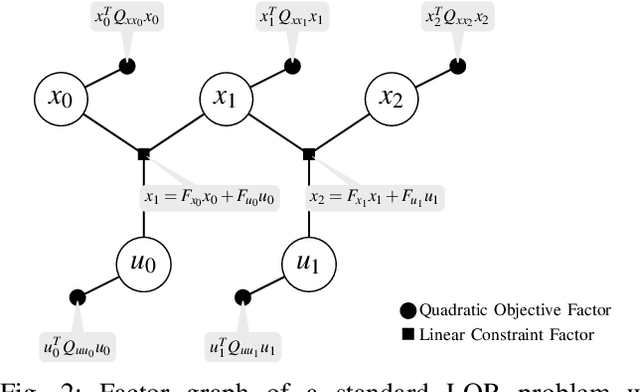
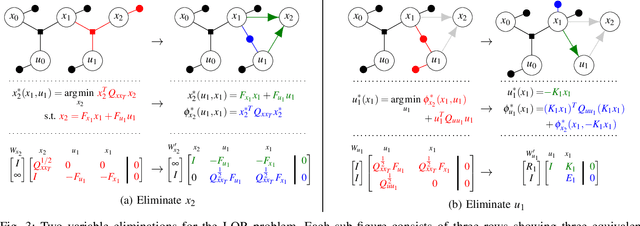
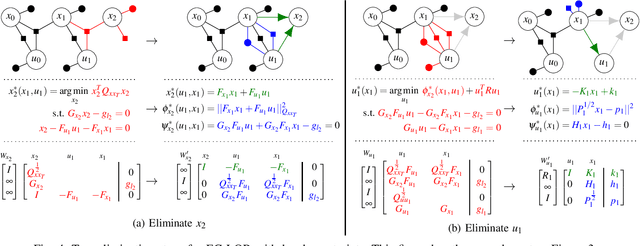
This paper presents a novel factor graph-based approach to solve the discrete-time finite-horizon Linear Quadratic Regulator problem subject to auxiliary linear equality constraints within and across time steps. We represent such optimal control problems using constrained factor graphs and optimize the factor graphs to obtain the optimal trajectory and the feedback control policies using the variable elimination algorithm with a modified Gram-Schmidt process. We prove that our approach has the same order of computational complexity as the state-of-the-art dynamic programming approach. Furthermore, current dynamic programming approaches can only handle equality constraints between variables at the same time step, but ours can handle equality constraints among any combination of variables at any time step while maintaining linear complexity with respect to trajectory length. Our approach can be used to efficiently generate trajectories and feedback control policies to achieve periodic motion or repetitive manipulation.
Shonan Rotation Averaging: Global Optimality by Surfing $SO(p)^n$
Aug 06, 2020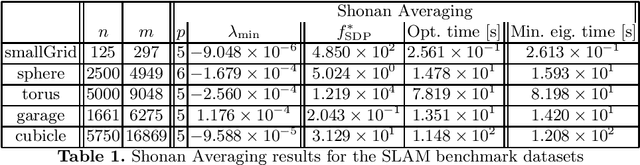
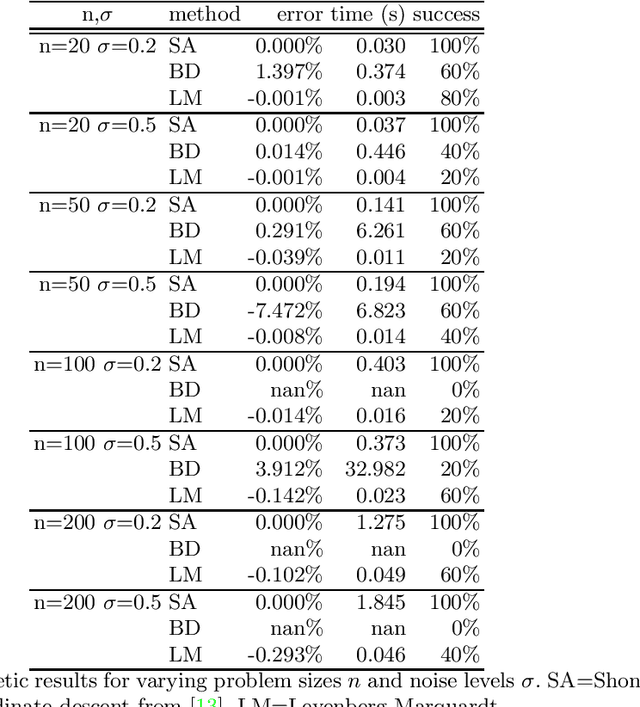
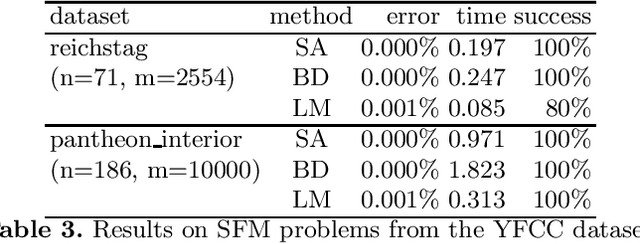
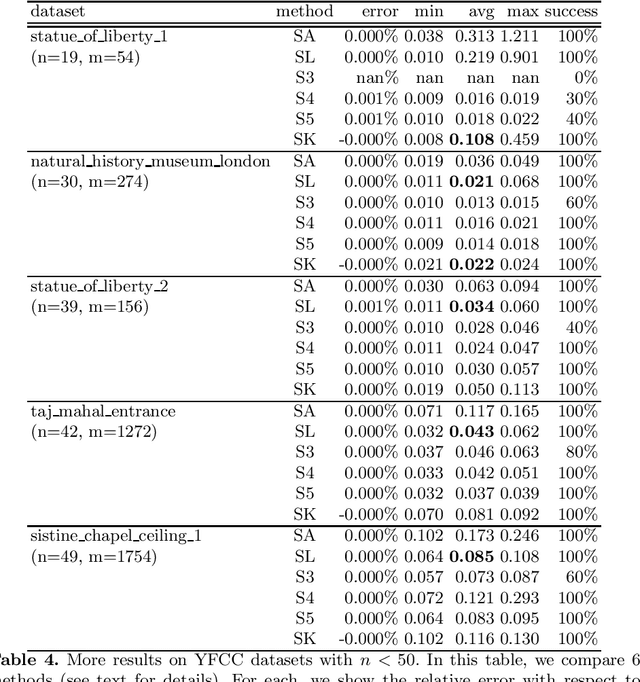
Shonan Rotation Averaging is a fast, simple, and elegant rotation averaging algorithm that is guaranteed to recover globally optimal solutions under mild assumptions on the measurement noise. Our method employs semidefinite relaxation in order to recover provably globally optimal solutions of the rotation averaging problem. In contrast to prior work, we show how to solve large-scale instances of these relaxations using manifold minimization on (only slightly) higher-dimensional rotation manifolds, re-using existing high-performance (but local) structure-from-motion pipelines. Our method thus preserves the speed and scalability of current SFM methods, while recovering globally optimal solutions.
Batch and Incremental Kinodynamic Motion Planning using Dynamic Factor Graphs
Jun 15, 2020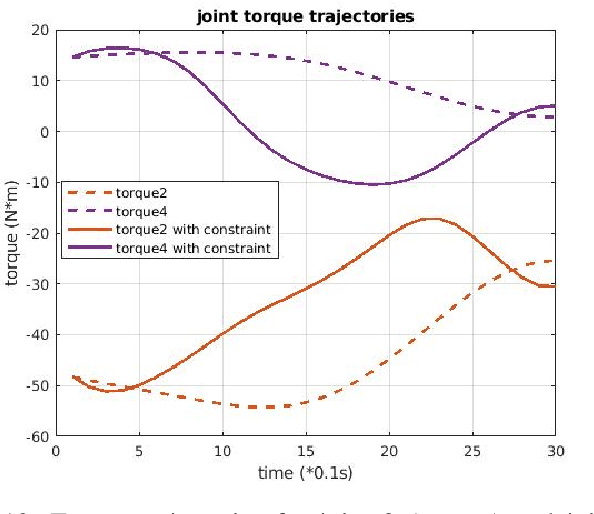
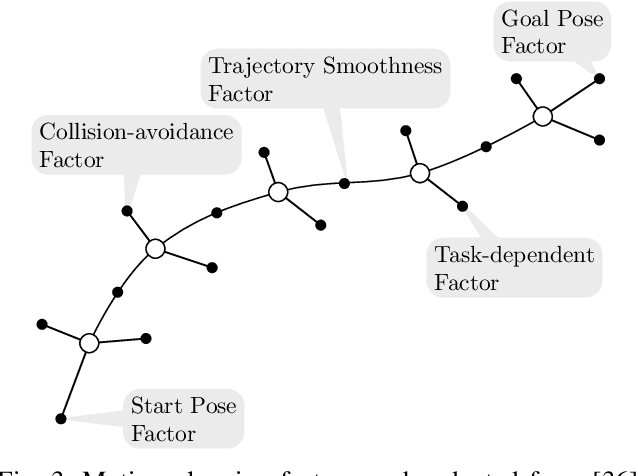
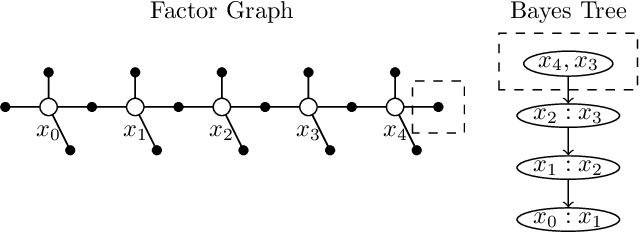
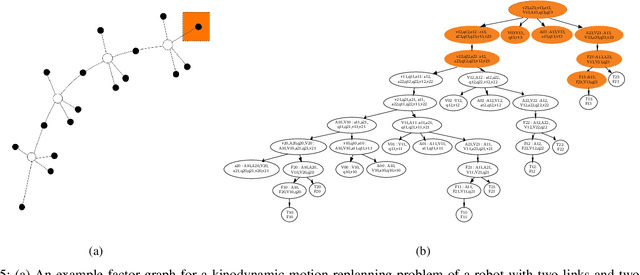
This paper presents a kinodynamic motion planner that is able to produce energy efficient motions by taking the full robot dynamics into account, and making use of gravity, inertia, and momentum to reduce the effort. Given a specific goal state for the robot, we use factor graphs and numerical optimization to solve for an optimal trajectory, which meets not only the requirements of collision avoidance, but also all kinematic and dynamic constraints, such as velocity, acceleration and torque limits. By exploiting the sparsity in factor graphs, we can solve a kinodynamic motion planning problem efficiently, on par with existing optimal control methods, and use incremental elimination techniques to achieve an order of magnitude faster replanning.
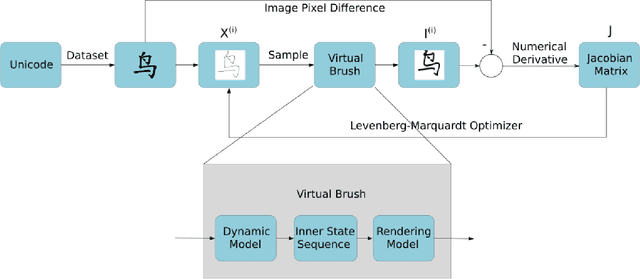
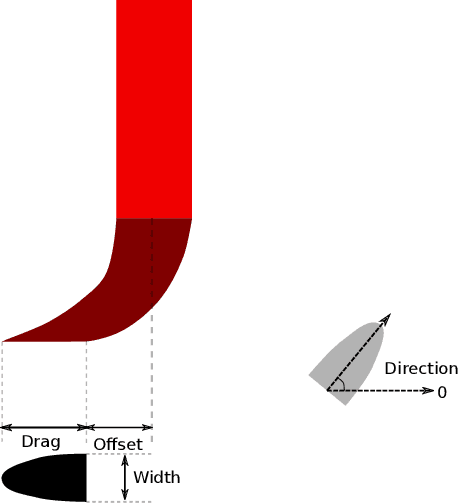
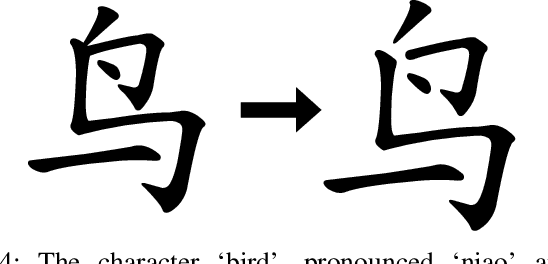
Robot Calligraphy using Pseudospectral Optimal Control in Conjunction with a Novel Dynamic Brush Model
Mar 02, 2020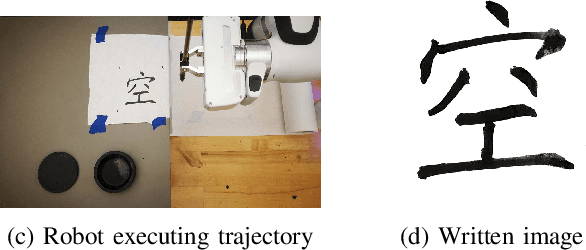
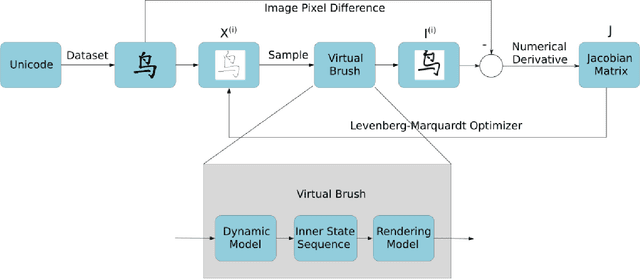
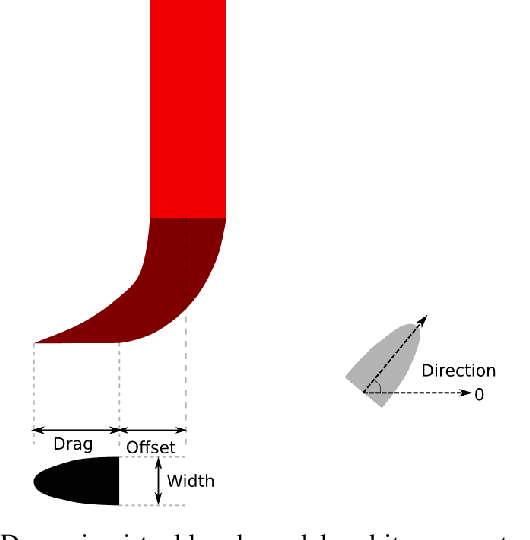
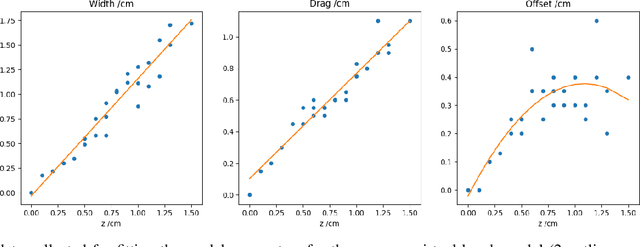
Chinese calligraphy is a unique art form with great artistic value but difficult to master. In this paper, we formulate the calligraphy writing problem as a trajectory optimization problem, and propose an improved virtual brush model for simulating the real writing process. Our approach is inspired by pseudospectral optimal control in that we parameterize the actuator trajectory for each stroke as a Chebyshev polynomial. The proposed dynamic virtual brush model plays a key role in formulating the objective function to be optimized. Our approach shows excellent performance in drawing aesthetically pleasing characters, and does so much more efficiently than previous work, opening up the possibility to achieve real-time closed-loop control.
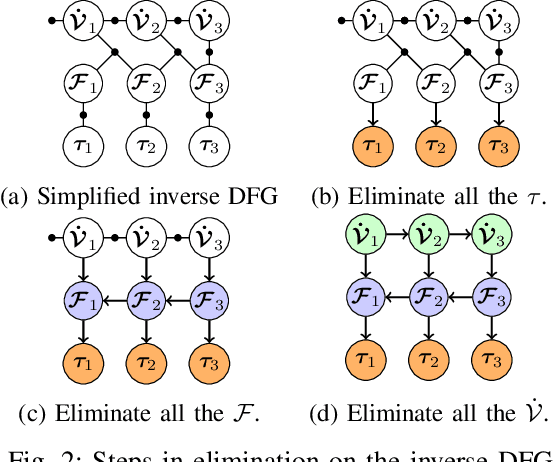
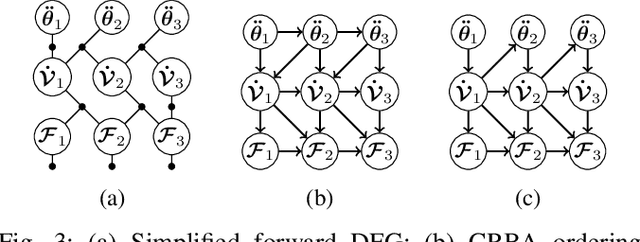
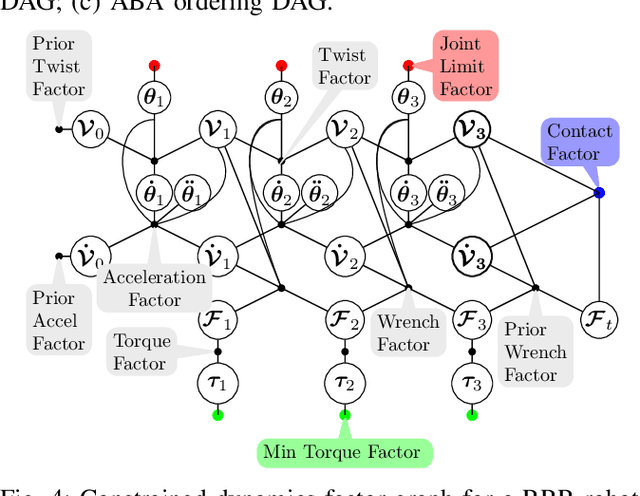
A Unified Method for Solving Inverse, Forward, and Hybrid Manipulator Dynamics using Factor Graphs
Nov 22, 2019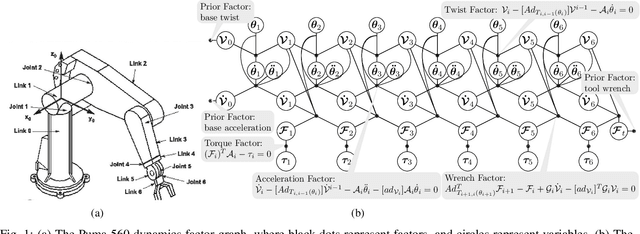
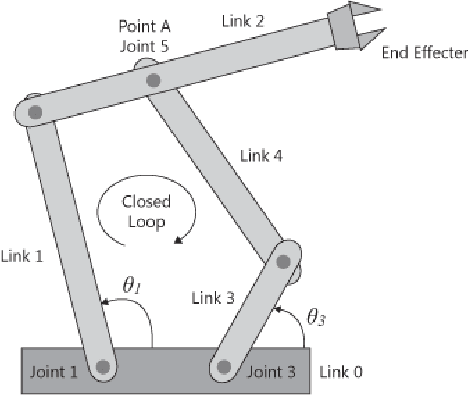
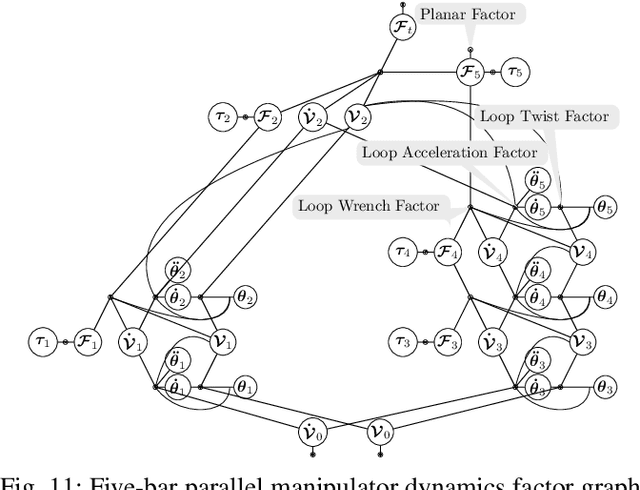
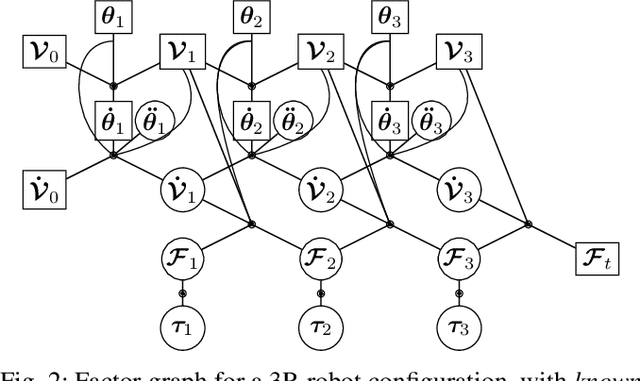
This paper describes a unified method solving for inverse, forward, and hybrid dynamics problems for robotic manipulators with either open kinematic chains or closed kinematic loops based on factor graphs. Manipulator dynamics is considered to be a well studied problem, and various different algorithms have been developed to solve each type of dynamics problem. However, they are not easily explained in an unified and intuitive way. In this paper, we introduce factor graphs as a unifying graphical language in which not only to solve all types of dynamics problems, but also explain the classical dynamics algorithms in a unified framework.
Robot Calligraphy using Pseudospectral Optimal Control in Conjunction with a Simulated Brush Model
Nov 18, 2019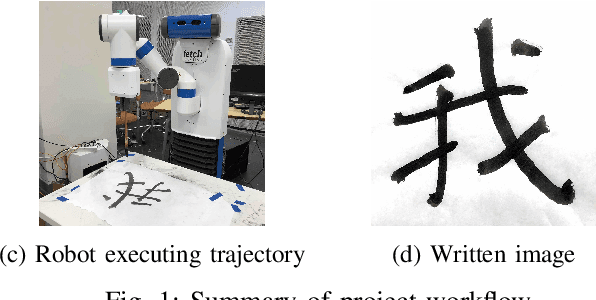
Chinese calligraphy is a unique form of art that has great artistic value but is difficult to master. In this paper, we make robots write calligraphy. Learning methods could teach robots to write, but may not be able to generalize to new characters. As such, we formulate the calligraphy writing problem as a trajectory optimization problem, and propose a new virtual brush model for simulating the real dynamic writing process. Our optimization approach is taken from pseudospectral optimal control, where the proposed dynamic virtual brush model plays a key role in formulating the objective function to be optimized. We also propose a stroke-level optimization to achieve better performance compared to the character-level optimization proposed in previous work. Our methodology shows good performance in drawing aesthetically pleasing characters.