 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultiGen: Using Multimodal Generation in Simulation to Learn Multimodal Policies in Real
Jul 03, 2025Robots must integrate multiple sensory modalities to act effectively in the real world. Yet, learning such multimodal policies at scale remains challenging. Simulation offers a viable solution, but while vision has benefited from high-fidelity simulators, other modalities (e.g. sound) can be notoriously difficult to simulate. As a result, sim-to-real transfer has succeeded primarily in vision-based tasks, with multimodal transfer still largely unrealized. In this work, we tackle these challenges by introducing MultiGen, a framework that integrates large-scale generative models into traditional physics simulators, enabling multisensory simulation. We showcase our framework on the dynamic task of robot pouring, which inherently relies on multimodal feedback. By synthesizing realistic audio conditioned on simulation video, our method enables training on rich audiovisual trajectories -- without any real robot data. We demonstrate effective zero-shot transfer to real-world pouring with novel containers and liquids, highlighting the potential of generative modeling to both simulate hard-to-model modalities and close the multimodal sim-to-real gap.
RoboVerse: Towards a Unified Platform, Dataset and Benchmark for Scalable and Generalizable Robot Learning
Apr 26, 2025



Data scaling and standardized evaluation benchmarks have driven significant advances in natural language processing and computer vision. However, robotics faces unique challenges in scaling data and establishing evaluation protocols. Collecting real-world data is resource-intensive and inefficient, while benchmarking in real-world scenarios remains highly complex. Synthetic data and simulation offer promising alternatives, yet existing efforts often fall short in data quality, diversity, and benchmark standardization. To address these challenges, we introduce RoboVerse, a comprehensive framework comprising a simulation platform, a synthetic dataset, and unified benchmarks. Our simulation platform supports multiple simulators and robotic embodiments, enabling seamless transitions between different environments. The synthetic dataset, featuring high-fidelity physics and photorealistic rendering, is constructed through multiple approaches. Additionally, we propose unified benchmarks for imitation learning and reinforcement learning, enabling evaluation across different levels of generalization. At the core of the simulation platform is MetaSim, an infrastructure that abstracts diverse simulation environments into a universal interface. It restructures existing simulation environments into a simulator-agnostic configuration system, as well as an API aligning different simulator functionalities, such as launching simulation environments, loading assets with initial states, stepping the physics engine, etc. This abstraction ensures interoperability and extensibility. Comprehensive experiments demonstrate that RoboVerse enhances the performance of imitation learning, reinforcement learning, world model learning, and sim-to-real transfer. These results validate the reliability of our dataset and benchmarks, establishing RoboVerse as a robust solution for advancing robot learning.
NeIF: Representing General Reflectance as Neural Intrinsics Fields for Uncalibrated Photometric Stereo
Aug 19, 2022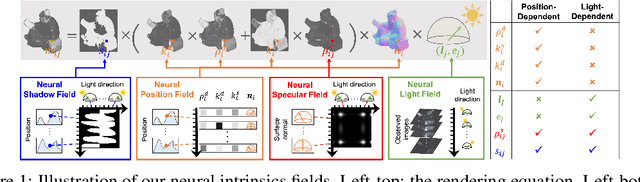
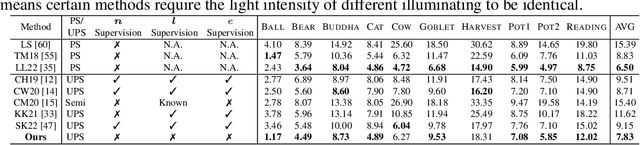
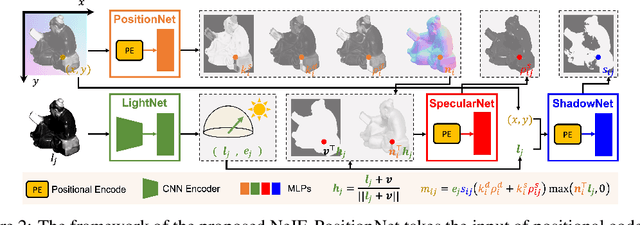

Uncalibrated photometric stereo (UPS) is challenging due to the inherent ambiguity brought by unknown light. Existing solutions alleviate the ambiguity by either explicitly associating reflectance to light conditions or resolving light conditions in a supervised manner. This paper establishes an implicit relation between light clues and light estimation and solves UPS in an unsupervised manner. The key idea is to represent the reflectance as four neural intrinsics fields, i.e., position, light, specular, and shadow, based on which the neural light field is implicitly associated with light clues of specular reflectance and cast shadow. The unsupervised, joint optimization of neural intrinsics fields can be free from training data bias as well as accumulating error, and fully exploits all observed pixel values for UPS. Our method achieves a superior performance advantage over state-of-the-art UPS methods on public and self-collected datasets, under regular and challenging setups. The code will be released soon.