 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState and Trajectory Estimation of Tensegrity Robots via Factor Graphs and Chebyshev Polynomials
Apr 09, 2026Tensegrity robots offer compliance and adaptability, but their nonlinear, and underconstrained dynamics make state estimation challenging. Reliable continuous-time estimation of all rigid links is crucial for closed-loop control, system identification, and machine learning; however, conventional methods often fall short. This paper proposes a two-stage approach for robust state or trajectory estimation (i.e., filtering or smoothing) of a cable-driven tensegrity robot. For online state estimation, this work introduces a factor-graph-based method, which fuses measurements from an RGB-D camera with on-board cable length sensors. To the best of the authors' knowledge, this is the first application of factor graphs in this domain. Factor graphs are a natural choice, as they exploit the robot's structural properties and provide effective sensor fusion solutions capable of handling nonlinearities in practice. Both the Mahalanobis distance-based clustering algorithm, used to handle noise, and the Chebyshev polynomial method, used to estimate the most probable velocities and intermediate states, are shown to perform well on simulated and real-world data, compared to an ICP-based algorithm. Results show that the approach provides high fidelity, continuous-time state and trajectory estimates for complex tensegrity robot motions.
Integrating Model-based Control and RL for Sim2Real Transfer of Tight Insertion Policies
May 17, 2025Object insertion under tight tolerances ($< \hspace{-.02in} 1mm$) is an important but challenging assembly task as even small errors can result in undesirable contacts. Recent efforts focused on Reinforcement Learning (RL), which often depends on careful definition of dense reward functions. This work proposes an effective strategy for such tasks that integrates traditional model-based control with RL to achieve improved insertion accuracy. The policy is trained exclusively in simulation and is zero-shot transferred to the real system. It employs a potential field-based controller to acquire a model-based policy for inserting a plug into a socket given full observability in simulation. This policy is then integrated with residual RL, which is trained in simulation given only a sparse, goal-reaching reward. A curriculum scheme over observation noise and action magnitude is used for training the residual RL policy. Both policy components use as input the SE(3) poses of both the plug and the socket and return the plug's SE(3) pose transform, which is executed by a robotic arm using a controller. The integrated policy is deployed on the real system without further training or fine-tuning, given a visual SE(3) object tracker. The proposed solution and alternatives are evaluated across a variety of objects and conditions in simulation and reality. The proposed approach outperforms recent RL-based methods in this domain and prior efforts with hybrid policies. Ablations highlight the impact of each component of the approach.
Kinodynamic Trajectory Following with STELA: Simultaneous Trajectory Estimation & Local Adaptation
Apr 28, 2025State estimation and control are often addressed separately, leading to unsafe execution due to sensing noise, execution errors, and discrepancies between the planning model and reality. Simultaneous control and trajectory estimation using probabilistic graphical models has been proposed as a unified solution to these challenges. Previous work, however, relies heavily on appropriate Gaussian priors and is limited to holonomic robots with linear time-varying models. The current research extends graphical optimization methods to vehicles with arbitrary dynamical models via Simultaneous Trajectory Estimation and Local Adaptation (STELA). The overall approach initializes feasible trajectories using a kinodynamic, sampling-based motion planner. Then, it simultaneously: (i) estimates the past trajectory based on noisy observations, and (ii) adapts the controls to be executed to minimize deviations from the planned, feasible trajectory, while avoiding collisions. The proposed factor graph representation of trajectories in STELA can be applied for any dynamical system given access to first or second-order state update equations, and introduces the duration of execution between two states in the trajectory discretization as an optimization variable. These features provide both generalization and flexibility in trajectory following. In addition to targeting computational efficiency, the proposed strategy performs incremental updates of the factor graph using the iSAM algorithm and introduces a time-window mechanism. This mechanism allows the factor graph to be dynamically updated to operate over a limited history and forward horizon of the planned trajectory. This enables online updates of controls at a minimum of 10Hz. Experiments demonstrate that STELA achieves at least comparable performance to previous frameworks on idealized vehicles with linear dynamics.[...]
${\tt KRAFT}$: Sampling-Based Kinodynamic Replanning and Feedback Control over Approximate, Identified Models of Vehicular Systems
Sep 17, 2024This paper aims to increase the safety and reliability of executing trajectories planned for robots with non-trivial dynamics given a light-weight, approximate dynamics model. Scenarios include mobile robots navigating through workspaces with imperfectly modeled surfaces and unknown friction. The proposed approach, Kinodynamic Replanning over Approximate Models with Feedback Tracking (KRAFT), integrates: (i) replanning via an asymptotically optimal sampling-based kinodynamic tree planner, with (ii) trajectory following via feedback control, and (iii) a safety mechanism to reduce collision due to second-order dynamics. The planning and control components use a rough dynamics model expressed analytically via differential equations, which is tuned via system identification (SysId) in a training environment but not the deployed one. This allows the process to be fast and achieve long-horizon reasoning during each replanning cycle. At the same time, the model still includes gaps with reality, even after SysID, in new environments. Experiments demonstrate the limitations of kinematic path planning and path tracking approaches, highlighting the importance of: (a) closing the feedback-loop also at the planning level; and (b) long-horizon reasoning, for safe and efficient trajectory execution given inaccurate models.
${\tt MORALS}$: Analysis of High-Dimensional Robot Controllers via Topological Tools in a Latent Space
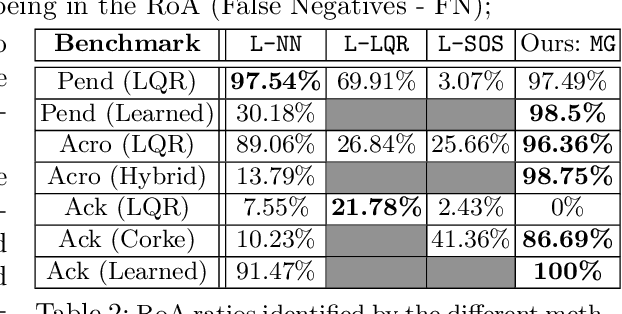
Oct 05, 2023Estimating the region of attraction (${\tt RoA}$) for a robotic system's controller is essential for safe application and controller composition. Many existing methods require access to a closed-form expression that limit applicability to data-driven controllers. Methods that operate only over trajectory rollouts tend to be data-hungry. In prior work, we have demonstrated that topological tools based on Morse Graphs offer data-efficient ${\tt RoA}$ estimation without needing an analytical model. They struggle, however, with high-dimensional systems as they operate over a discretization of the state space. This paper presents ${\it Mo}$rse Graph-aided discovery of ${\it R}$egions of ${\it A}$ttraction in a learned ${\it L}$atent ${\it S}$pace (${\tt MORALS}$). The approach combines autoencoding neural networks with Morse Graphs. ${\tt MORALS}$ shows promising predictive capabilities in estimating attractors and their ${\tt RoA}$s for data-driven controllers operating over high-dimensional systems, including a 67-dim humanoid robot and a 96-dim 3-fingered manipulator. It first projects the dynamics of the controlled system into a learned latent space. Then, it constructs a reduced form of Morse Graphs representing the bistability of the underlying dynamics, i.e., detecting when the controller results in a desired versus an undesired behavior. The evaluation on high-dimensional robotic datasets indicates the data efficiency of the approach in ${\tt RoA}$ estimation.
A Survey on the Integration of Machine Learning with Sampling-based Motion Planning
Nov 15, 2022
Sampling-based methods are widely adopted solutions for robot motion planning. The methods are straightforward to implement, effective in practice for many robotic systems. It is often possible to prove that they have desirable properties, such as probabilistic completeness and asymptotic optimality. Nevertheless, they still face challenges as the complexity of the underlying planning problem increases, especially under tight computation time constraints, which impact the quality of returned solutions or given inaccurate models. This has motivated machine learning to improve the computational efficiency and applicability of Sampling-Based Motion Planners (SBMPs). This survey reviews such integrative efforts and aims to provide a classification of the alternative directions that have been explored in the literature. It first discusses how learning has been used to enhance key components of SBMPs, such as node sampling, collision detection, distance or nearest neighbor computation, local planning, and termination conditions. Then, it highlights planners that use learning to adaptively select between different implementations of such primitives in response to the underlying problem's features. It also covers emerging methods, which build complete machine learning pipelines that reflect the traditional structure of SBMPs. It also discusses how machine learning has been used to provide data-driven models of robots, which can then be used by a SBMP. Finally, it provides a comparative discussion of the advantages and disadvantages of the approaches covered, and insights on possible future directions of research. An online version of this survey can be found at: https://prx-kinodynamic.github.io/
* First two authors contributed equally
Data-Efficient Characterization of the Global Dynamics of Robot Controllers with Confidence Guarantees
Oct 04, 2022



This paper proposes an integration of surrogate modeling and topology to significantly reduce the amount of data required to describe the underlying global dynamics of robot controllers, including closed-box ones. A Gaussian Process (GP), trained with randomized short trajectories over the state-space, acts as a surrogate model for the underlying dynamical system. Then, a combinatorial representation is built and used to describe the dynamics in the form of a directed acyclic graph, known as {\it Morse graph}. The Morse graph is able to describe the system's attractors and their corresponding regions of attraction (\roa). Furthermore, a pointwise confidence level of the global dynamics estimation over the entire state space is provided. In contrast to alternatives, the framework does not require estimation of Lyapunov functions, alleviating the need for high prediction accuracy of the GP. The framework is suitable for data-driven controllers that do not expose an analytical model as long as Lipschitz-continuity is satisfied. The method is compared against established analytical and recent machine learning alternatives for estimating \roa s, outperforming them in data efficiency without sacrificing accuracy. Link to code: https://go.rutgers.edu/49hy35en
USHER: Unbiased Sampling for Hindsight Experience Replay
Jul 03, 2022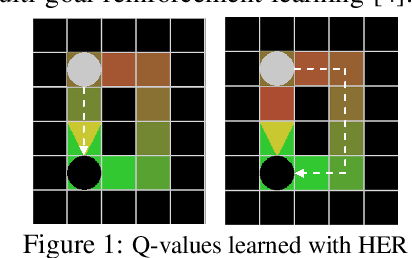
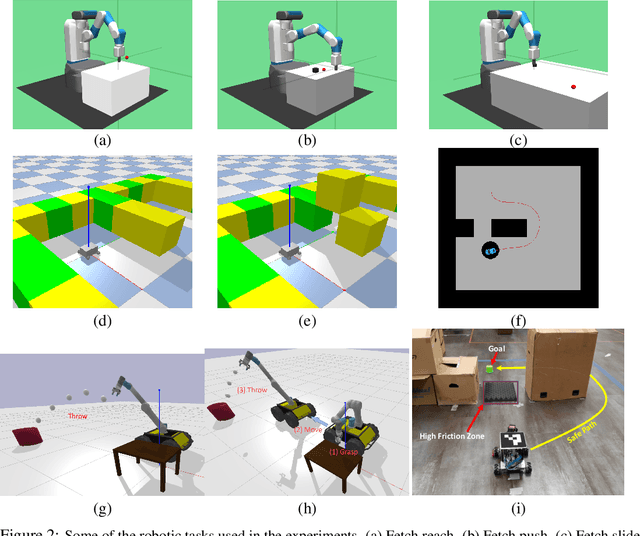
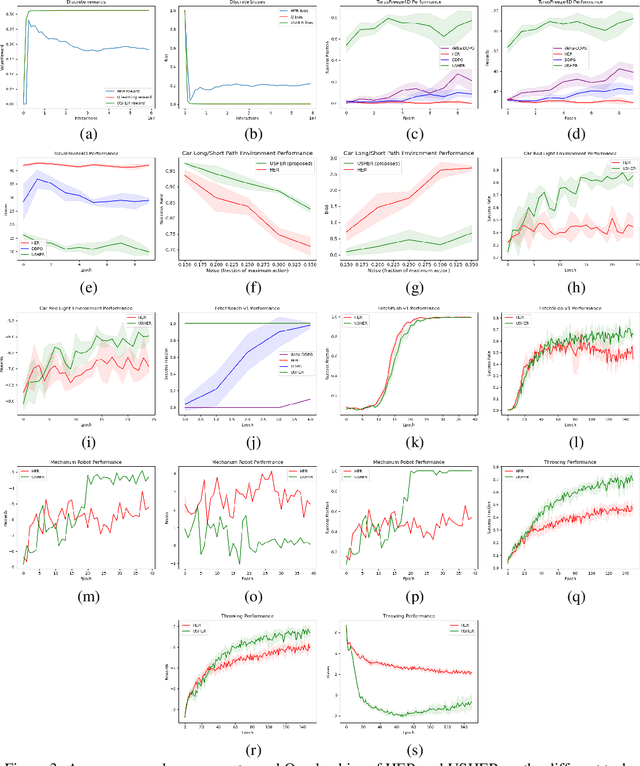
Dealing with sparse rewards is a long-standing challenge in reinforcement learning (RL). Hindsight Experience Replay (HER) addresses this problem by reusing failed trajectories for one goal as successful trajectories for another. This allows for both a minimum density of reward and for generalization across multiple goals. However, this strategy is known to result in a biased value function, as the update rule underestimates the likelihood of bad outcomes in a stochastic environment. We propose an asymptotically unbiased importance-sampling-based algorithm to address this problem without sacrificing performance on deterministic environments. We show its effectiveness on a range of robotic systems, including challenging high dimensional stochastic environments.
Morse Graphs: Topological Tools for Analyzing the Global Dynamics of Robot Controllers
Feb 17, 2022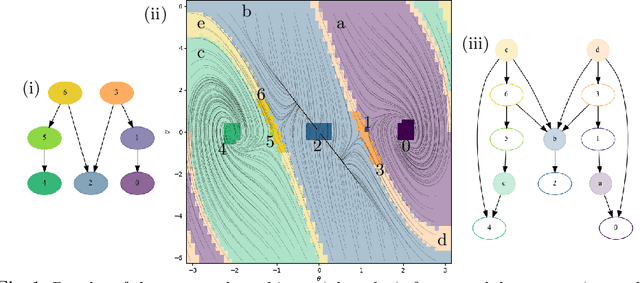
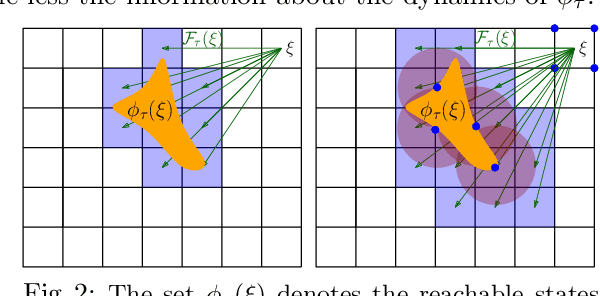
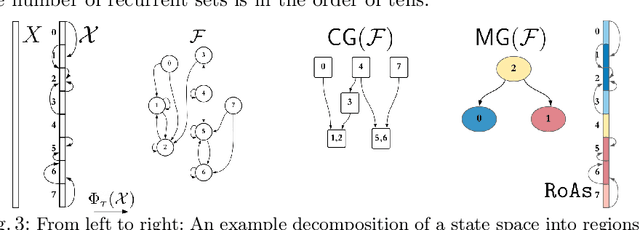
Understanding the global dynamics of a robot controller, such as identifying attractors and their regions of attraction (RoA), is important for safe deployment and synthesizing more effective hybrid controllers. This paper proposes a topological framework to analyze the global dynamics of robot controllers, even data-driven ones, in an effective and explainable way. It builds a combinatorial representation representing the underlying system's state space and non-linear dynamics, which is summarized in a directed acyclic graph, the Morse graph. The approach only probes the dynamics locally by forward propagating short trajectories over a state-space discretization, which needs to be a Lipschitz-continuous function. The framework is evaluated given either numerical or data-driven controllers for classical robotic benchmarks. It is compared against established analytical and recent machine learning alternatives for estimating the RoAs of such controllers. It is shown to outperform them in accuracy and efficiency. It also provides deeper insights as it describes the global dynamics up to the discretization's resolution. This allows to use the Morse graph to identify how to synthesize controllers to form improved hybrid solutions or how to identify the physical limitations of a robotic system.
Data-Efficient Learning of High-Quality Controls for Kinodynamic Planning used in Vehicular Navigation
Jan 06, 2022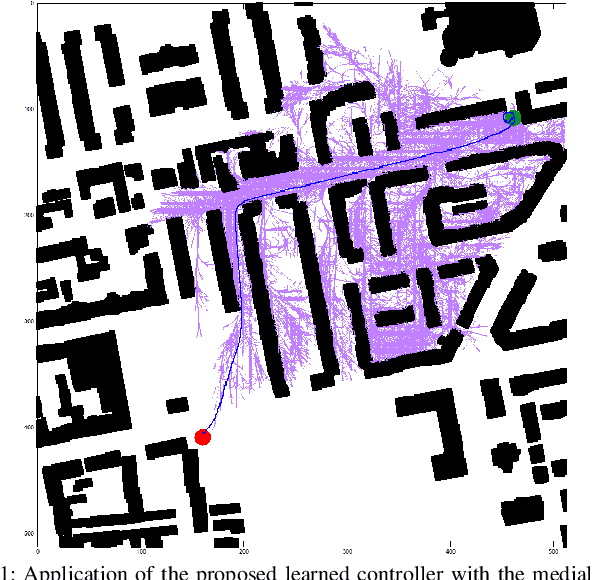
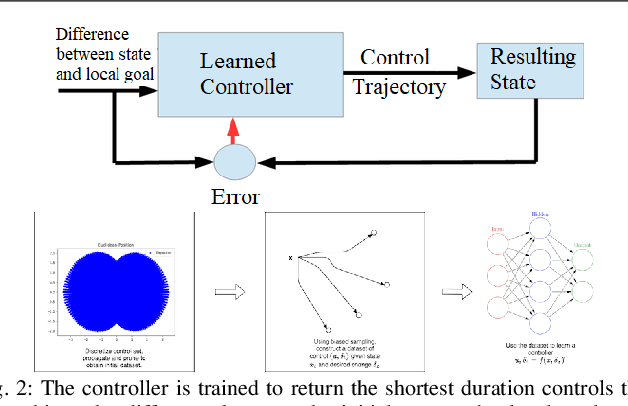
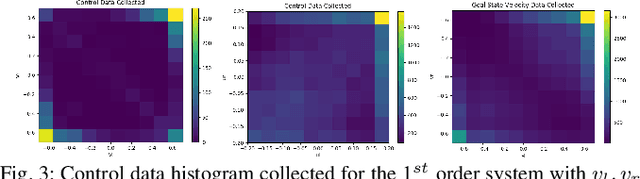
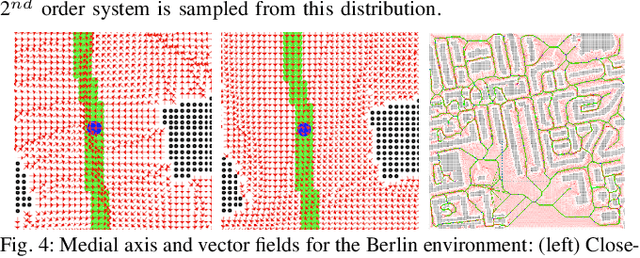
This paper aims to improve the path quality and computational efficiency of kinodynamic planners used for vehicular systems. It proposes a learning framework for identifying promising controls during the expansion process of sampling-based motion planners for systems with dynamics. Offline, the learning process is trained to return the highest-quality control that reaches a local goal state (i.e., a waypoint) in the absence of obstacles from an input difference vector between its current state and a local goal state. The data generation scheme provides bounds on the target dispersion and uses state space pruning to ensure high-quality controls. By focusing on the system's dynamics, this process is data efficient and takes place once for a dynamical system, so that it can be used for different environments with modular expansion functions. This work integrates the proposed learning process with a) an exploratory expansion function that generates waypoints with biased coverage over the reachable space, and b) proposes an exploitative expansion function for mobile robots, which generates waypoints using medial axis information. This paper evaluates the learning process and the corresponding planners for a first and second-order differential drive systems. The results show that the proposed integration of learning and planning can produce better quality paths than kinodynamic planning with random controls in fewer iterations and computation time.
* Presented at the Machine Learning for Motion Planning (MLMP) Workshop at ICRA 2021, Xi'an, China