 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeState and Trajectory Estimation of Tensegrity Robots via Factor Graphs and Chebyshev Polynomials
Apr 09, 2026Tensegrity robots offer compliance and adaptability, but their nonlinear, and underconstrained dynamics make state estimation challenging. Reliable continuous-time estimation of all rigid links is crucial for closed-loop control, system identification, and machine learning; however, conventional methods often fall short. This paper proposes a two-stage approach for robust state or trajectory estimation (i.e., filtering or smoothing) of a cable-driven tensegrity robot. For online state estimation, this work introduces a factor-graph-based method, which fuses measurements from an RGB-D camera with on-board cable length sensors. To the best of the authors' knowledge, this is the first application of factor graphs in this domain. Factor graphs are a natural choice, as they exploit the robot's structural properties and provide effective sensor fusion solutions capable of handling nonlinearities in practice. Both the Mahalanobis distance-based clustering algorithm, used to handle noise, and the Chebyshev polynomial method, used to estimate the most probable velocities and intermediate states, are shown to perform well on simulated and real-world data, compared to an ICP-based algorithm. Results show that the approach provides high fidelity, continuous-time state and trajectory estimates for complex tensegrity robot motions.
CableRobotGraphSim: A Graph Neural Network for Modeling Partially Observable Cable-Driven Robot Dynamics
Feb 24, 2026General-purpose simulators have accelerated the development of robots. Traditional simulators based on first-principles, however, typically require full-state observability or depend on parameter search for system identification. This work presents \texttt{CableRobotGraphSim}, a novel Graph Neural Network (GNN) model for cable-driven robots that aims to address shortcomings of prior simulation solutions. By representing cable-driven robots as graphs, with the rigid-bodies as nodes and the cables and contacts as edges, this model can quickly and accurately match the properties of other simulation models and real robots, while ingesting only partially observable inputs. Accompanying the GNN model is a sim-and-real co-training procedure that promotes generalization and robustness to noisy real data. This model is further integrated with a Model Predictive Path Integral (MPPI) controller for closed-loop navigation, which showcases the model's speed and accuracy.
An Open-Source, Reproducible Tensegrity Robot that can Navigate Among Obstacles
Nov 08, 2025Tensegrity robots, composed of rigid struts and elastic tendons, provide impact resistance, low mass, and adaptability to unstructured terrain. Their compliance and complex, coupled dynamics, however, present modeling and control challenges, hindering path planning and obstacle avoidance. This paper presents a complete, open-source, and reproducible system that enables navigation for a 3-bar tensegrity robot. The system comprises: (i) an inexpensive, open-source hardware design, and (ii) an integrated, open-source software stack for physics-based modeling, system identification, state estimation, path planning, and control. All hardware and software are publicly available at https://sites.google.com/view/tensegrity-navigation/. The proposed system tracks the robot's pose and executes collision-free paths to a specified goal among known obstacle locations. System robustness is demonstrated through experiments involving unmodeled environmental challenges, including a vertical drop, an incline, and granular media, culminating in an outdoor field demonstration. To validate reproducibility, experiments were conducted using robot instances at two different laboratories. This work provides the robotics community with a complete navigation system for a compliant, impact-resistant, and shape-morphing robot. This system is intended to serve as a springboard for advancing the navigation capabilities of other unconventional robotic platforms.
Multidimensional ground reaction forces and moments from wearable sensor accelerations via deep learning
Apr 01, 2019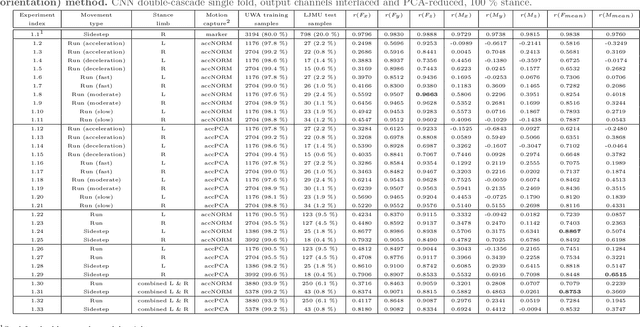
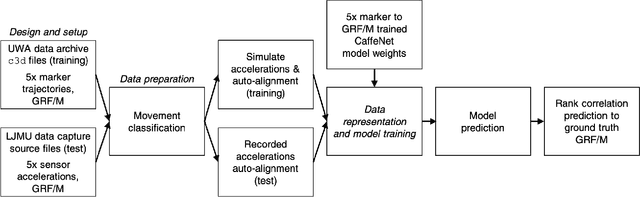
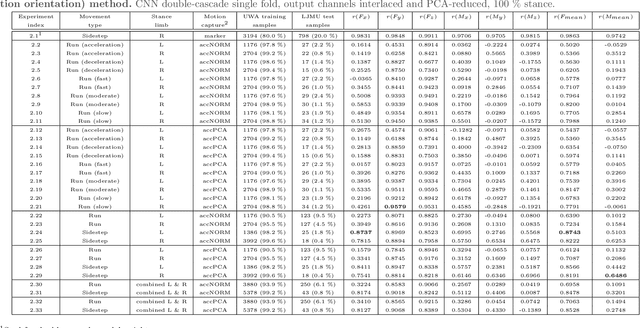
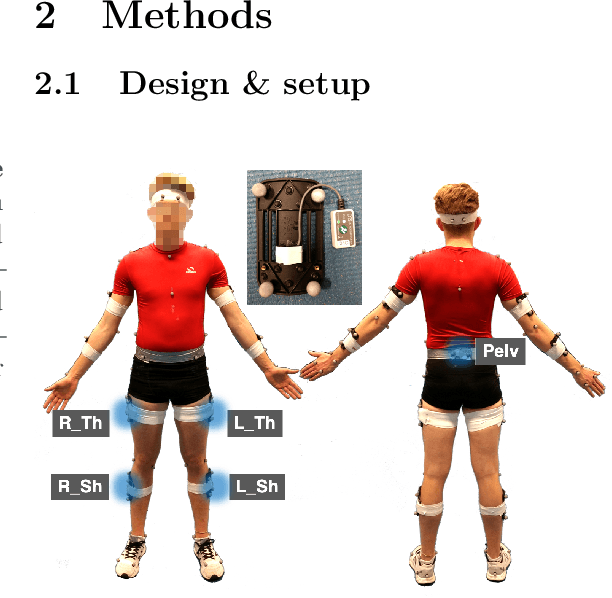
Objective: Monitoring athlete internal workload exposure, including prevention of catastrophic non-contact knee injuries, relies on the existence of a custom early-warning detection system. This system must be able to estimate accurate, reliable, and valid musculoskeletal joint loads, for sporting maneuvers in near real-time and during match play. However, current methods are constrained to laboratory instrumentation, are labor and cost intensive, and require highly trained specialist knowledge, thereby limiting their ecological validity and volume deployment. Methods: Here we show that kinematic data obtained from wearable sensor accelerometers, in lieu of embedded force platforms, can leverage recent supervised learning techniques to predict in-game near real-time multidimensional ground reaction forces and moments (GRF/M). Competing convolutional neural network (CNN) deep learning models were trained using laboratory-derived stance phase GRF/M data and simulated sensor accelerations for running and sidestepping maneuvers derived from nearly half a million legacy motion trials. Then, predictions were made from each model driven by five sensor accelerations recorded during independent inter-laboratory data capture sessions. Results: Despite adversarial conditions, the proposed deep learning workbench achieved correlations to ground truth, by GRF component, of vertical 0.9663, anterior 0.9579 (both running), and lateral 0.8737 (sidestepping). Conclusion: The lessons learned from this study will facilitate the use of wearable sensors in conjunction with deep learning to accurately estimate near real-time on-field GRF/M. Significance: Coaching, medical, and allied health staff can use this technology to monitor a range of joint loading indicators during game play, with the ultimate aim to minimize the occurrence of non-contact injuries in elite and community-level sports.
On-field player workload exposure and knee injury risk monitoring via deep learning
Sep 21, 2018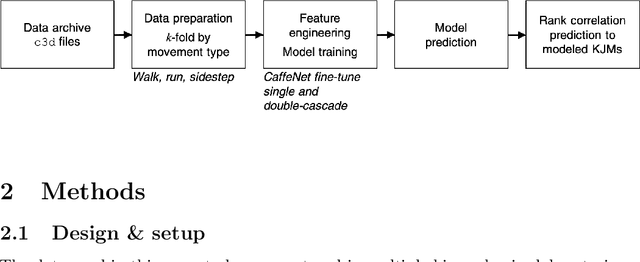
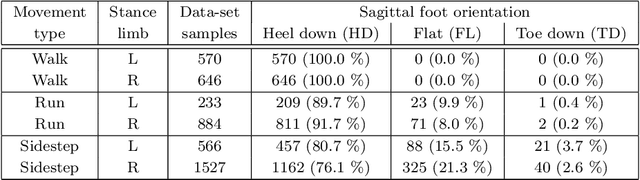
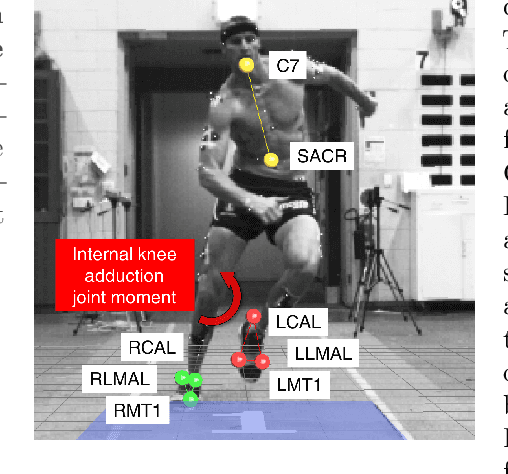
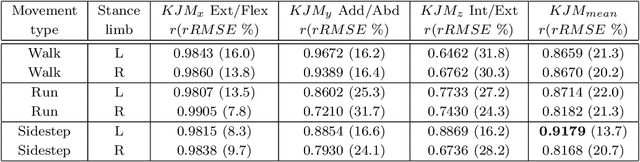
In sports analytics, an understanding of accurate on-field 3D knee joint moments (KJM) could provide an early warning system for athlete workload exposure and knee injury risk. Traditionally, this analysis has relied on captive laboratory force plates and associated downstream biomechanical modeling, and many researchers have approached the problem of portability by extrapolating models built on linear statistics. An alternative approach would be to capitalize on recent advances in deep learning. In this study, using the pre-trained CaffeNet convolutional neural network (CNN) model, multivariate regression of marker-based motion capture to 3D KJM for three sports-related movement types were compared. The strongest overall mean correlation to source modeling of 0.8895 was achieved over the initial 33 % of stance phase for sidestepping. The accuracy of these mean predictions of the three critical KJM associated with anterior cruciate ligament (ACL) injury demonstrate the feasibility of on-field knee injury assessment using deep learning in lieu of laboratory embedded force plates. This multidisciplinary research approach significantly advances machine representation of real-world physical models with practical application for both community and professional level athletes.