 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrating Model-based Control and RL for Sim2Real Transfer of Tight Insertion Policies
May 17, 2025Object insertion under tight tolerances ($< \hspace{-.02in} 1mm$) is an important but challenging assembly task as even small errors can result in undesirable contacts. Recent efforts focused on Reinforcement Learning (RL), which often depends on careful definition of dense reward functions. This work proposes an effective strategy for such tasks that integrates traditional model-based control with RL to achieve improved insertion accuracy. The policy is trained exclusively in simulation and is zero-shot transferred to the real system. It employs a potential field-based controller to acquire a model-based policy for inserting a plug into a socket given full observability in simulation. This policy is then integrated with residual RL, which is trained in simulation given only a sparse, goal-reaching reward. A curriculum scheme over observation noise and action magnitude is used for training the residual RL policy. Both policy components use as input the SE(3) poses of both the plug and the socket and return the plug's SE(3) pose transform, which is executed by a robotic arm using a controller. The integrated policy is deployed on the real system without further training or fine-tuning, given a visual SE(3) object tracker. The proposed solution and alternatives are evaluated across a variety of objects and conditions in simulation and reality. The proposed approach outperforms recent RL-based methods in this domain and prior efforts with hybrid policies. Ablations highlight the impact of each component of the approach.
ChatGPT is all you need to decolonize sub-Saharan Vocational Education
Apr 11, 2023The advances of Generative AI models with interactive capabilities over the past few years offer unique opportunities for socioeconomic mobility. Their potential for scalability, accessibility, affordability, personalizing and convenience sets a first-class opportunity for poverty-stricken countries to adapt and modernize their educational order. As a result, this position paper makes the case for an educational policy framework that would succeed in this transformation by prioritizing vocational and technical training over academic education in sub-Saharan African countries. We highlight substantial applications of Large Language Models, tailor-made to their respective cultural background(s) and needs, that would reinforce their systemic decolonization. Lastly, we provide specific historical examples of diverse states successfully implementing such policies in the elementary steps of their socioeconomic transformation, in order to corroborate our proposal to sub-Saharan African countries to follow their lead.
How to track your dragon: A Multi-Attentional Framework for real-time RGB-D 6-DOF Object Pose Tracking
Apr 21, 2020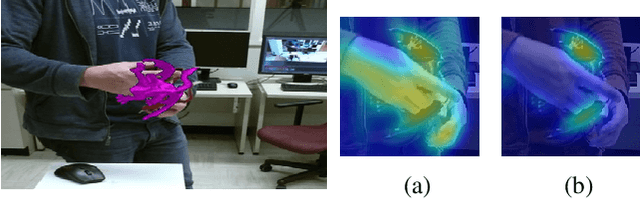
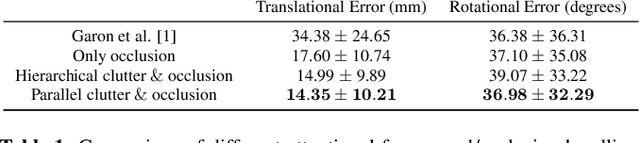
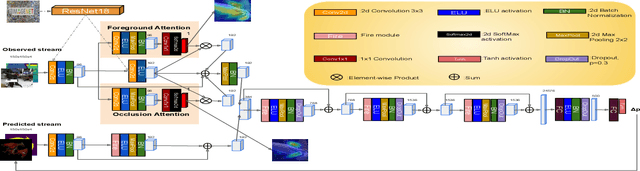
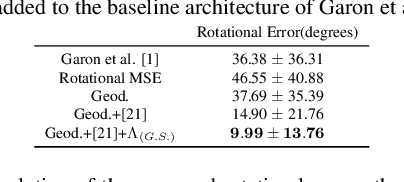
We present a novel multi-attentional convolutional architecture to tackle the problem of real-time RGB-D 6D object pose tracking of single, known objects. Such a problem poses multiple challenges originating both from the objects' nature and their interaction with their environment, which previous approaches have failed to fully address. The proposed framework encapsulates methods for background clutter and occlusion handling by integrating multiple parallel soft spatial attention modules into a multitask Convolutional Neural Network (CNN) architecture. Moreover, we consider the special geometrical properties of both the object's 3D model and the pose space, and we use a more sophisticated approach for data augmentation for training. The provided experimental results confirm the effectiveness of the proposed multi-attentional architecture, as it improves the State-of-the-Art (SoA) tracking performance by an average score of 40.5% for translation and 57.5% for rotation, when testing on the dataset presented in [1], the most complete dataset designed, up to date, for the problem of RGB-D object tracking.