 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Multi-scenario Attention-based Generative Model for Personalized Blood Pressure Time Series Forecasting
Sep 07, 2024Continuous blood pressure (BP) monitoring is essential for timely diagnosis and intervention in critical care settings. However, BP varies significantly across individuals, this inter-patient variability motivates the development of personalized models tailored to each patient's physiology. In this work, we propose a personalized BP forecasting model mainly using electrocardiogram (ECG) and photoplethysmogram (PPG) signals. This time-series model incorporates 2D representation learning to capture complex physiological relationships. Experiments are conducted on datasets collected from three diverse scenarios with BP measurements from 60 subjects total. Results demonstrate that the model achieves accurate and robust BP forecasts across scenarios within the Association for the Advancement of Medical Instrumentation (AAMI) standard criteria. This reliable early detection of abnormal fluctuations in BP is crucial for at-risk patients undergoing surgery or intensive care. The proposed model provides a valuable addition for continuous BP tracking to reduce mortality and improve prognosis.
SCREENER: A general framework for task-specific experiment design in quantitative MRI
Aug 06, 2024Quantitative magnetic resonance imaging (qMRI) is increasingly investigated for use in a variety of clinical tasks from diagnosis, through staging, to treatment monitoring. However, experiment design in qMRI, the identification of the optimal acquisition protocols, has been focused on obtaining the most precise parameter estimations, with no regard for the specific requirements of downstream tasks. Here we propose SCREENER: A general framework for task-specific experiment design in quantitative MRI. SCREENER incorporates a task-specific objective and seeks the optimal protocol with a deep-reinforcement-learning (DRL) based optimization strategy. To illustrate this framework, we employ a task of classifying the inflammation status of bone marrow using diffusion MRI data with intravoxel incoherent motion (IVIM) modelling. Results demonstrate SCREENER outperforms previous ad hoc and optimized protocols under clinical signal-to-noise ratio (SNR) conditions, achieving significant improvement, both in binary classification tasks, e.g. from 67% to 89%, and in a multi-class classification task, from 46% to 59%. Additionally, we show this improvement is robust to the SNR. Lastly, we demonstrate the advantage of DRL-based optimization strategy, enabling zero-shot discovery of near-optimal protocols for a range of SNRs not used in training. In conclusion, SCREENER has the potential to enable wider uptake of qMRI in the clinic.
InkStream: Real-time GNN Inference on Streaming Graphs via Incremental Update
Sep 20, 2023



Classic Graph Neural Network (GNN) inference approaches, designed for static graphs, are ill-suited for streaming graphs that evolve with time. The dynamism intrinsic to streaming graphs necessitates constant updates, posing unique challenges to acceleration on GPU. We address these challenges based on two key insights: (1) Inside the $k$-hop neighborhood, a significant fraction of the nodes is not impacted by the modified edges when the model uses min or max as aggregation function; (2) When the model weights remain static while the graph structure changes, node embeddings can incrementally evolve over time by computing only the impacted part of the neighborhood. With these insights, we propose a novel method, InkStream, designed for real-time inference with minimal memory access and computation, while ensuring an identical output to conventional methods. InkStream operates on the principle of propagating and fetching data only when necessary. It uses an event-based system to control inter-layer effect propagation and intra-layer incremental updates of node embedding. InkStream is highly extensible and easily configurable by allowing users to create and process customized events. We showcase that less than 10 lines of additional user code are needed to support popular GNN models such as GCN, GraphSAGE, and GIN. Our experiments with three GNN models on four large graphs demonstrate that InkStream accelerates by 2.5-427$\times$ on a CPU cluster and 2.4-343$\times$ on two different GPU clusters while producing identical outputs as GNN model inference on the latest graph snapshot.
A Motion Assessment Method for Reference Stack Selection in Fetal Brain MRI Reconstruction Based on Tensor Rank Approximation
Jun 30, 2023



Purpose: Slice-to-volume registration and super-resolution reconstruction (SVR-SRR) is commonly used to generate 3D volumes of the fetal brain from 2D stacks of slices acquired in multiple orientations. A critical initial step in this pipeline is to select one stack with the minimum motion as a reference for registration. An accurate and unbiased motion assessment (MA) is thus crucial for successful selection. Methods: We presented a MA method that determines the minimum motion stack based on 3D low-rank approximation using CANDECOMP/PARAFAC (CP) decomposition. Compared to the current 2D singular value decomposition (SVD) based method that requires flattening stacks into matrices to obtain ranks, in which the spatial information is lost, the CP-based method can factorize 3D stack into low-rank and sparse components in a computationally efficient manner. The difference between the original stack and its low-rank approximation was proposed as the motion indicator. Results: Compared to SVD-based methods, our proposed CP-based MA demonstrated higher sensitivity in detecting small motion with a lower baseline bias. Experiments on randomly simulated motion illustrated that the proposed CP method achieved a higher success rate of 95.45% in identifying the minimum motion stack, compared to SVD-based method with a success rate of 58.18%. We further demonstrated that combining CP-based MA with existing SRR-SVR pipeline significantly improved 3D volume reconstruction. Conclusion: The proposed CP-based MA method showed superior performance compared to SVD-based methods with higher sensitivity to motion, success rate, and lower baseline bias, and can be used as a prior step to improve fetal brain reconstruction.
Quantum Power Flows: From Theory to Practice
Nov 10, 2022Climate change is becoming one of the greatest challenges to the sustainable development of modern society. Renewable energies with low density greatly complicate the online optimization and control processes, where modern advanced computational technologies, specifically quantum computing, have significant potential to help. In this paper, we discuss applications of quantum computing algorithms toward state-of-the-art smart grid problems. We suggest potential, exponential quantum speedup by the use of the Harrow-Hassidim-Lloyd (HHL) algorithms for sparse matrix inversions in power-flow problems. However, practical implementations of the algorithm are limited by the noise of quantum circuits, the hardness of realizations of quantum random access memories (QRAM), and the depth of the required quantum circuits. We benchmark the hardware and software requirements from the state-of-the-art power-flow algorithms, including QRAM requirements from hybrid phonon-transmon systems, and explicit gate counting used in HHL for explicit realizations. We also develop near-term algorithms of power flow by variational quantum circuits and implement real experiments for 6 qubits with a truncated version of power flows.
Robotic Assembly Control Reconfiguration Based on Transfer Reinforcement Learning for Objects with Different Geometric Features
Nov 04, 2022



Robotic force-based compliance control is a preferred approach to achieve high-precision assembly tasks. When the geometric features of assembly objects are asymmetric or irregular, reinforcement learning (RL) agents are gradually incorporated into the compliance controller to adapt to complex force-pose mapping which is hard to model analytically. Since force-pose mapping is strongly dependent on geometric features, a compliance controller is only optimal for current geometric features. To reduce the learning cost of assembly objects with different geometric features, this paper is devoted to answering how to reconfigure existing controllers for new assembly objects with different geometric features. In this paper, model-based parameters are first reconfigured based on the proposed Equivalent Theory of Compliance Law (ETCL). Then the RL agent is transferred based on the proposed Weighted Dimensional Policy Distillation (WDPD) method. The experiment results demonstrate that the control reconfiguration method costs less time and achieves better control performance, which confirms the validity of proposed methods.
Local Connection Reinforcement Learning Method for Efficient Control of Robotic Peg-in-Hole Assembly
Oct 24, 2022



Traditional control methods of robotic peg-in-hole assembly rely on complex contact state analysis. Reinforcement learning (RL) is gradually becoming a preferred method of controlling robotic peg-in-hole assembly tasks. However, the training process of RL is quite time-consuming because RL methods are always globally connected, which means all state components are assumed to be the input of policies for all action components, thus increasing action space and state space to be explored. In this paper, we first define continuous space serialized Shapley value (CS3) and construct a connection graph to clarify the correlativity of action components on state components. Then we propose a local connection reinforcement learning (LCRL) method based on the connection graph, which eliminates the influence of irrelevant state components on the selection of action components. The simulation and experiment results demonstrate that the control strategy obtained through LCRL method improves the stability and rapidity of the control process. LCRL method will enhance the data-efficiency and increase the final reward of the training process.
System-level Simulation of Reconfigurable Intelligent Surface assisted Wireless Communications System
Jun 29, 2022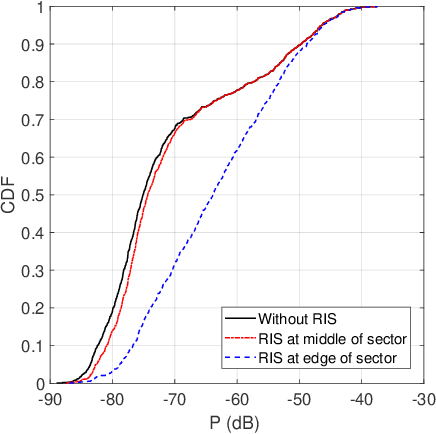
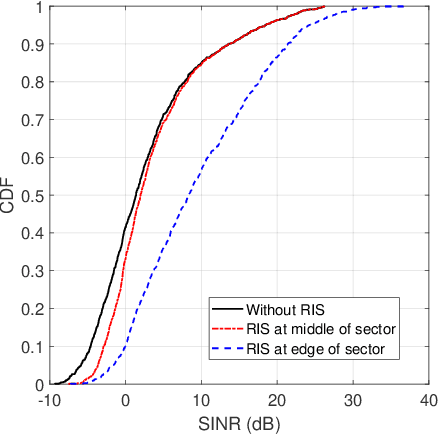
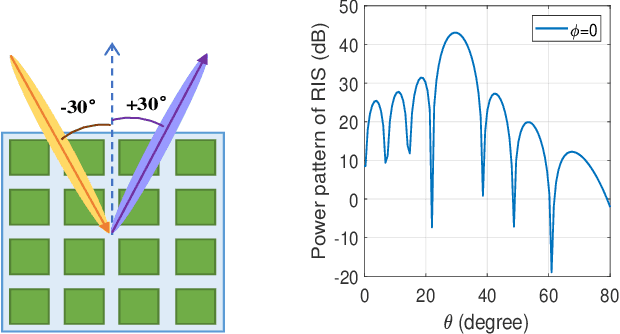
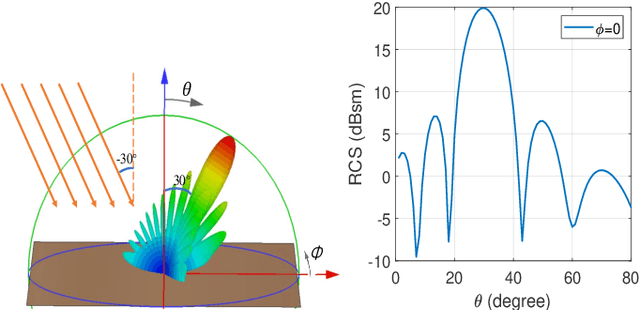
Reconfigurable intelligent surface (RIS) is an emerging technique employing metasurface to reflect the signal from the source node to the destination node. By smartly reconfiguring the electromagnetic (EM) properties of the metasurface and adjusting the EM parameters of the reflected radio waves, RIS can turn the uncontrollable propagation environment into an artificially reconfigurable space, and thus, can significantly increase the communications capacity and improve the coverage of the system. In this paper, we investigate the far field channel in which the line-of-sight (LOS) propagation is dominant. We propose an antenna model that can characterize the radiation patterns of realistic RIS elements, and consider the signal power received from the two-hop path through RIS. System-level simulations of network performance under various scenarios and parameter.
A microstructure estimation Transformer inspired by sparse representation for diffusion MRI
May 13, 2022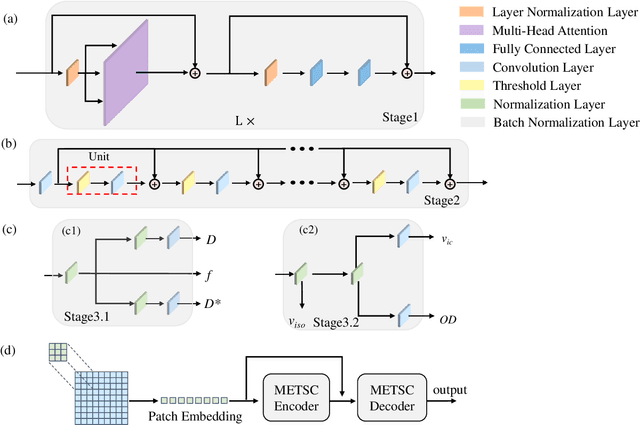
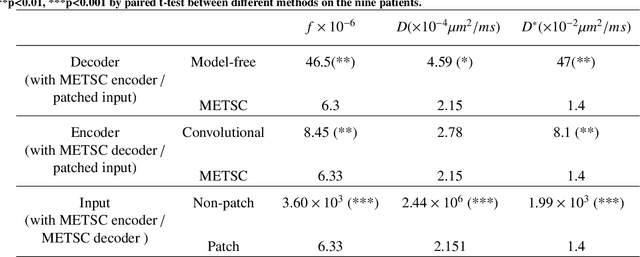
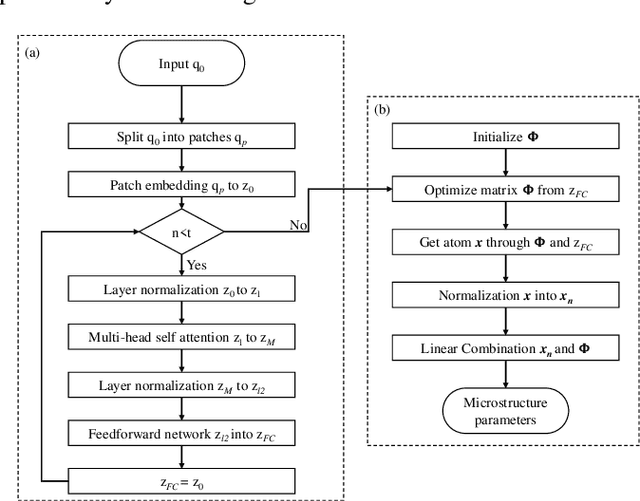
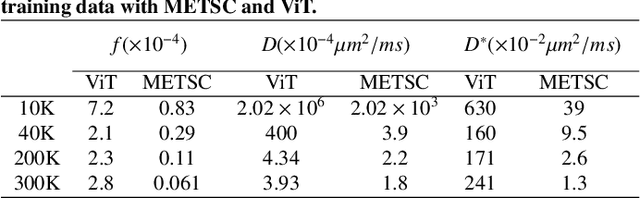
Diffusion magnetic resonance imaging (dMRI) is an important tool in characterizing tissue microstructure based on biophysical models, which are complex and highly non-linear. Resolving microstructures with optimization techniques is prone to estimation errors and requires dense sampling in the q-space. Deep learning based approaches have been proposed to overcome these limitations. Motivated by the superior performance of the Transformer, in this work, we present a learning-based framework based on Transformer, namely, a Microstructure Estimation Transformer with Sparse Coding (METSC) for dMRI-based microstructure estimation with downsampled q-space data. To take advantage of the Transformer while addressing its limitation in large training data requirements, we explicitly introduce an inductive bias - model bias into the Transformer using a sparse coding technique to facilitate the training process. Thus, the METSC is composed with three stages, an embedding stage, a sparse representation stage, and a mapping stage. The embedding stage is a Transformer-based structure that encodes the signal to ensure the voxel is represented effectively. In the sparse representation stage, a dictionary is constructed by solving a sparse reconstruction problem that unfolds the Iterative Hard Thresholding (IHT) process. The mapping stage is essentially a decoder that computes the microstructural parameters from the output of the second stage, based on the weighted sum of normalized dictionary coefficients where the weights are also learned. We tested our framework on two dMRI models with downsampled q-space data, including the intravoxel incoherent motion (IVIM) model and the neurite orientation dispersion and density imaging (NODDI) model. The proposed method achieved up to 11.25 folds of acceleration in scan time and outperformed the other state-of-the-art learning-based methods.
AFFIRM: Affinity Fusion-based Framework for Iteratively Random Motion correction of multi-slice fetal brain MRI
May 12, 2022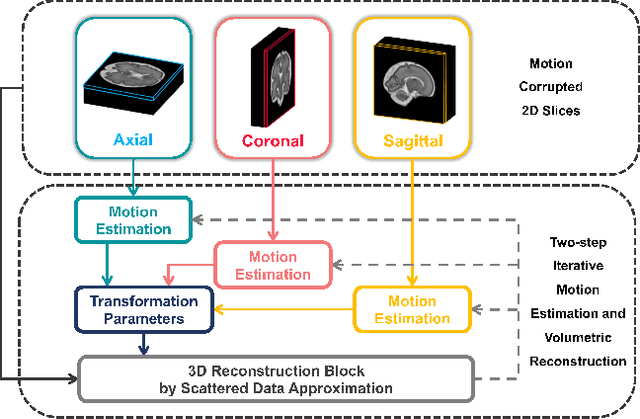
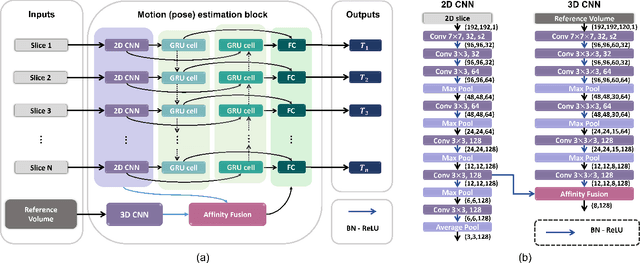
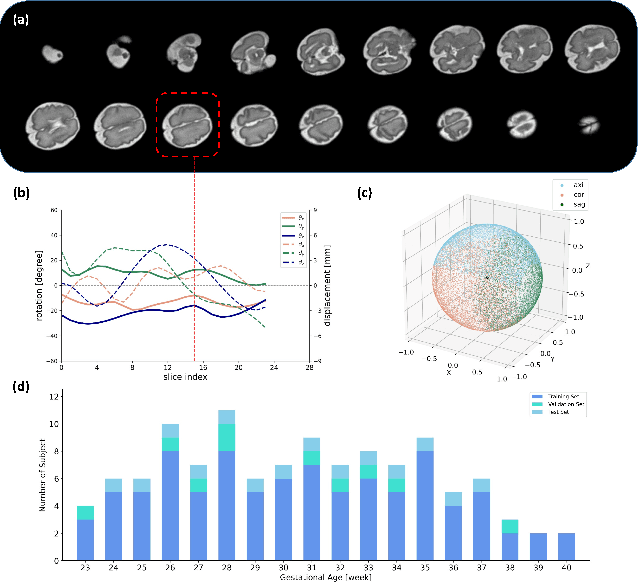
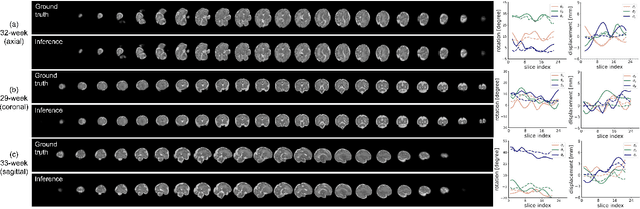
Multi-slice magnetic resonance images of the fetal brain are usually contaminated by severe and arbitrary fetal and maternal motion. Hence, stable and robust motion correction is necessary to reconstruct high-resolution 3D fetal brain volume for clinical diagnosis and quantitative analysis. However, the conventional registration-based correction has a limited capture range and is insufficient for detecting relatively large motions. Here, we present a novel Affinity Fusion-based Framework for Iteratively Random Motion (AFFIRM) correction of the multi-slice fetal brain MRI. It learns the sequential motion from multiple stacks of slices and integrates the features between 2D slices and reconstructed 3D volume using affinity fusion, which resembles the iterations between slice-to-volume registration and volumetric reconstruction in the regular pipeline. The method accurately estimates the motion regardless of brain orientations and outperforms other state-of-the-art learning-based methods on the simulated motion-corrupted data, with a 48.4% reduction of mean absolute error for rotation and 61.3% for displacement. We then incorporated AFFIRM into the multi-resolution slice-to-volume registration and tested it on the real-world fetal MRI scans at different gestation stages. The results indicated that adding AFFIRM to the conventional pipeline improved the success rate of fetal brain super-resolution reconstruction from 77.2% to 91.9%.