 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Constraint-Driven Approach to Line Flocking: The V Formation as an Energy-Saving Strategy
Sep 23, 2022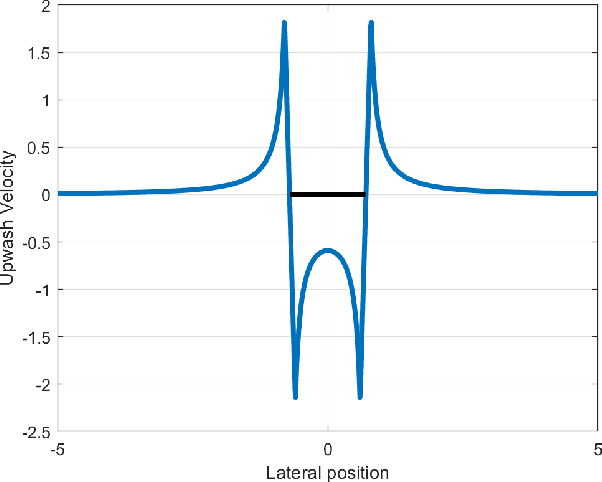
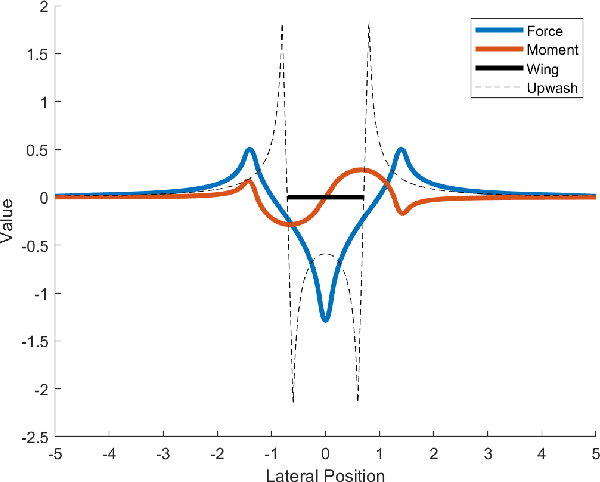
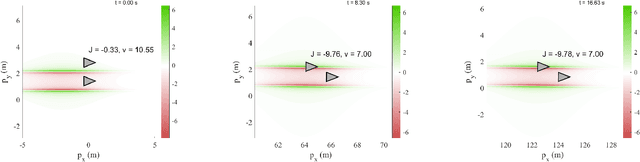
The study of robotic flocking has received significant attention in the past twenty years. In this article, we present a constraint-driven control algorithm that minimizes the energy consumption of individual agents and yields an emergent V formation. As the formation emerges from the decentralized interaction between agents, our approach is robust to the spontaneous addition or removal of agents to the system. First, we present an analytical model for the trailing upwash behind a fixed-wing UAV, and we derive the optimal air speed for trailing UAVs to maximize their travel endurance. Next, we prove that simply flying at the optimal airspeed will never lead to emergent flocking behavior, and we propose a new decentralized "anseroid" behavior that yields emergent V formations. We encode these behaviors in a constraint-driven control algorithm that minimizes the locomotive power of each UAV. Finally, we prove that UAVs initialized in an approximate V or echelon formation will converge under our proposed control law, and we demonstrate this emergence occurs in real-time in simulation and in physical experiments with a fleet of Crazyflie quadrotors.
Robust Active Visual Perching with Quadrotors on Inclined Surfaces
Apr 05, 2022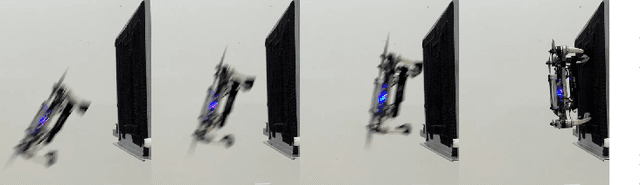
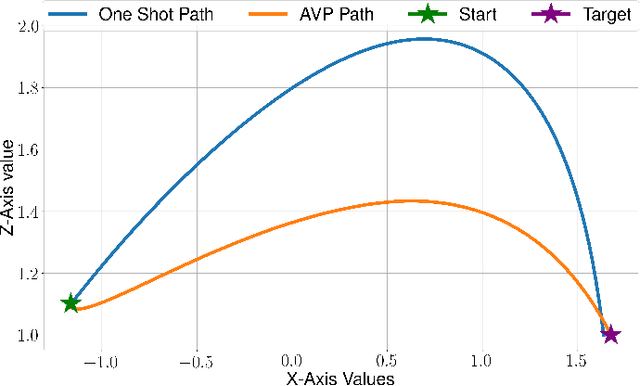
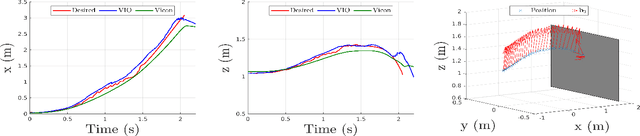
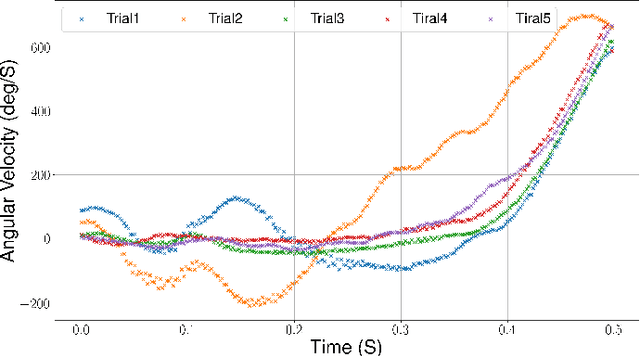
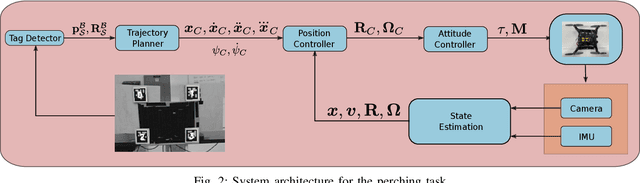
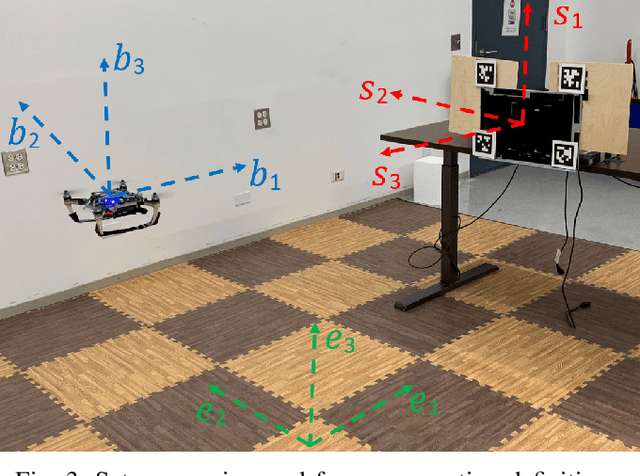
Autonomous Micro Aerial Vehicles are deployed for a variety tasks including surveillance and monitoring. Perching and staring allow the vehicle to monitor targets without flying, saving battery power and increasing the overall mission time without the need to frequently replace batteries. This paper addresses the Active Visual Perching (AVP) control problem to autonomously perch on inclined surfaces up to $90^\circ$. Our approach generates dynamically feasible trajectories to navigate and perch on a desired target location, while taking into account actuator and Field of View (FoV) constraints. By replanning in mid-flight, we take advantage of more accurate target localization increasing the perching maneuver's robustness to target localization or control errors. We leverage the Karush-Kuhn-Tucker (KKT) conditions to identify the compatibility between planning objectives and the visual sensing constraint during the planned maneuver. Furthermore, we experimentally identify the corresponding boundary conditions that maximizes the spatio-temporal target visibility during the perching maneuver. The proposed approach works on-board in real-time with significant computational constraints relying exclusively on cameras and an Inertial Measurement Unit (IMU). Experimental results validate the proposed approach and shows the higher success rate as well as increased target interception precision and accuracy with respect to a one-shot planning approach, while still retaining aggressive capabilities with flight envelopes that include large excursions from the hover position on inclined surfaces up to 90$^\circ$, angular speeds up to 750~deg/s, and accelerations up to 10~m/s$^2$.
Aggressive Visual Perching with Quadrotors on Inclined Surfaces
Jul 23, 2021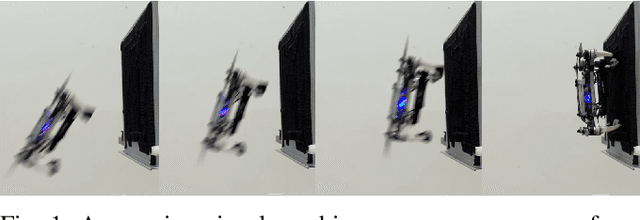
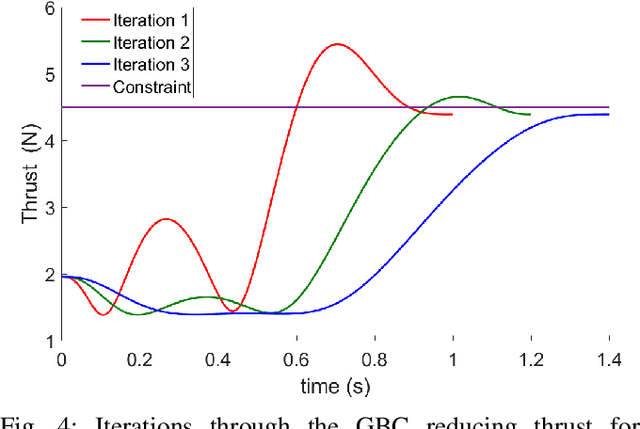
Autonomous Micro Aerial Vehicles (MAVs) have the potential to be employed for surveillance and monitoring tasks. By perching and staring on one or multiple locations aerial robots can save energy while concurrently increasing their overall mission time without actively flying. In this paper, we address the estimation, planning, and control problems for autonomous perching on inclined surfaces with small quadrotors using visual and inertial sensing. We focus on planning and executing of dynamically feasible trajectories to navigate and perch to a desired target location with on board sensing and computation. Our planner also supports certain classes of nonlinear global constraints by leveraging an efficient algorithm that we have mathematically verified. The on board cameras and IMU are concurrently used for state estimation and to infer the relative robot/target localization. The proposed solution runs in real-time on board a limited computational unit. Experimental results validate the proposed approach by tackling aggressive perching maneuvers with flight envelopes that include large excursions from the hover position on inclined surfaces up to 90$^\circ$, angular rates up to 600~deg/s, and accelerations up to 10m/s^2.
A Resilient and Energy-Aware Task Allocation Framework for Heterogeneous Multi-Robot Systems
May 12, 2021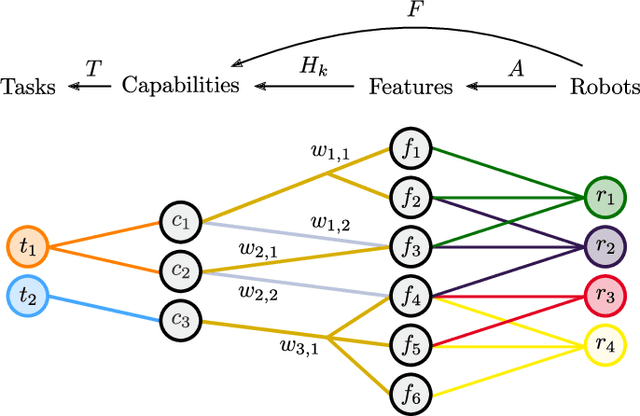
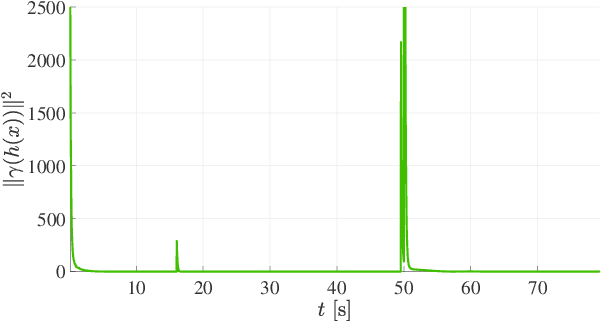
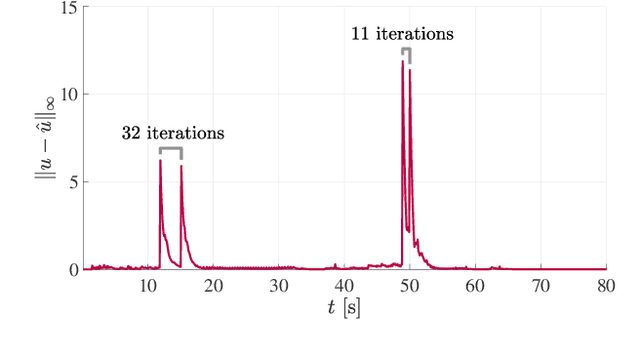
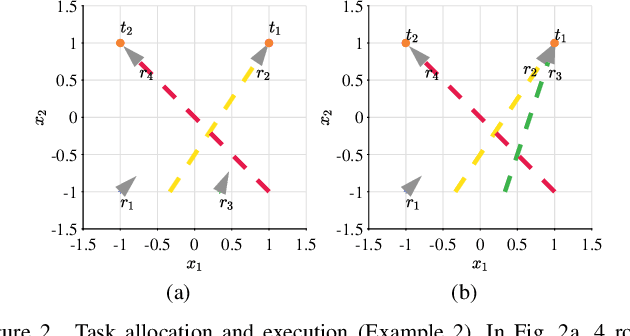
In the context of heterogeneous multi-robot teams deployed for executing multiple tasks, this paper develops an energy-aware framework for allocating tasks to robots in an online fashion. With a primary focus on long-duration autonomy applications, we opt for a survivability-focused approach. Towards this end, the task prioritization and execution -- through which the allocation of tasks to robots is effectively realized -- are encoded as constraints within an optimization problem aimed at minimizing the energy consumed by the robots at each point in time. In this context, an allocation is interpreted as a prioritization of a task over all others by each of the robots. Furthermore, we present a novel framework to represent the heterogeneous capabilities of the robots, by distinguishing between the features available on the robots, and the capabilities enabled by these features. By embedding these descriptions within the optimization problem, we make the framework resilient to situations where environmental conditions make certain features unsuitable to support a capability and when component failures on the robots occur. We demonstrate the efficacy and resilience of the proposed approach in a variety of use-case scenarios, consisting of simulations and real robot experiments.
Differential Flatness as a Sufficient Condition to Generate Optimal Trajectories in Real Time
Mar 04, 2021
As robotic systems increase in autonomy, there is a strong need to plan efficient trajectories in real-time. In this paper, we propose an approach to significantly reduce the complexity of solving optimal control problems both numerically and analytically. We exploit the property of differential flatness to show that it is always possible to decouple the forward dynamics of the system's state from the backward dynamics that emerge from the Euler-Lagrange equations. This coupling generally leads to instabilities in numerical approaches; thus, we expect our method to make traditional "shooting" methods a viable choice for optimal trajectory planning in differentially flat systems. To provide intuition for our approach, we also present an illustrative example of generating minimum-thrust trajectories for a quadrotor. Furthermore, we employ quaternions to track the quadrotor's orientation, which, unlike the Euler-angle representation, do not introduce additional singularities into the model.