 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRADA: Robust Adversarial Data Augmentation for Camera Localization in Challenging Weather
Dec 05, 2021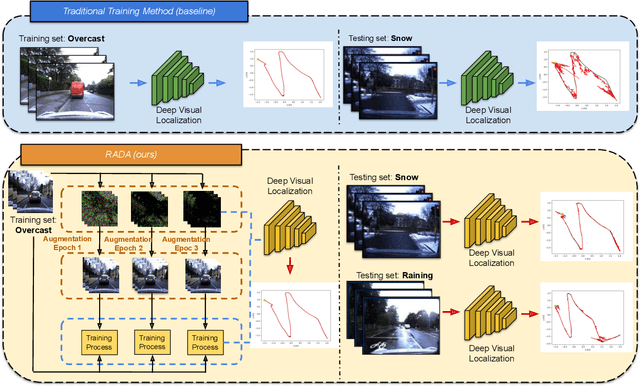
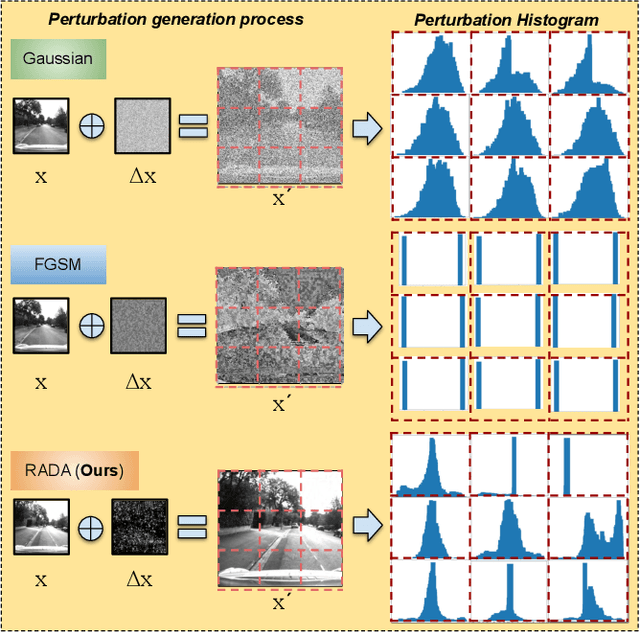
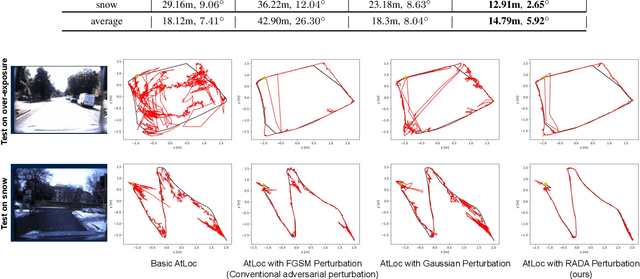
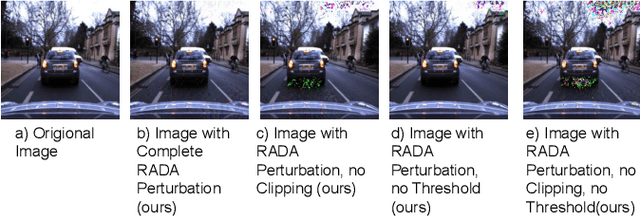
Camera localization is a fundamental and crucial problem for many robotic applications. In recent years, using deep-learning for camera-based localization has become a popular research direction. However, they lack robustness to large domain shifts, which can be caused by seasonal or illumination changes between training and testing data sets. Data augmentation is an attractive approach to tackle this problem, as it does not require additional data to be provided. However, existing augmentation methods blindly perturb all pixels and therefore cannot achieve satisfactory performance. To overcome this issue, we proposed RADA, a system whose aim is to concentrate on perturbing the geometrically informative parts of the image. As a result, it learns to generate minimal image perturbations that are still capable of perplexing the network. We show that when these examples are utilized as augmentation, it greatly improves robustness. We show that our method outperforms previous augmentation techniques and achieves up to two times higher accuracy than the SOTA localization models (e.g., AtLoc and MapNet) when tested on `unseen' challenging weather conditions.
CubeLearn: End-to-end Learning for Human Motion Recognition from Raw mmWave Radar Signals
Nov 07, 2021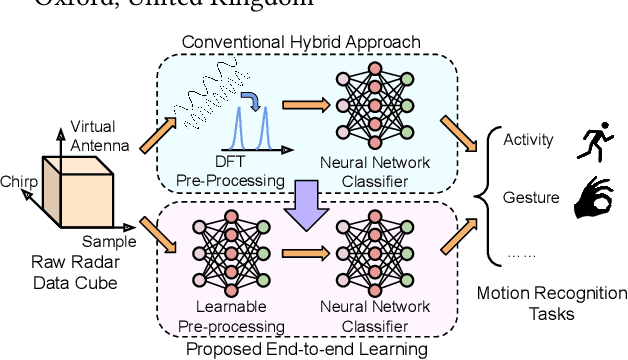
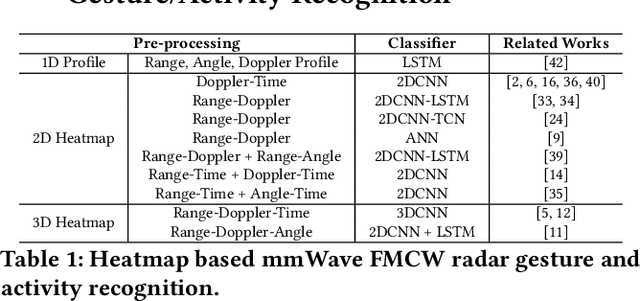
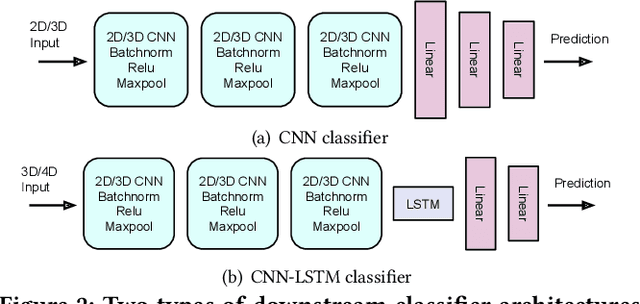
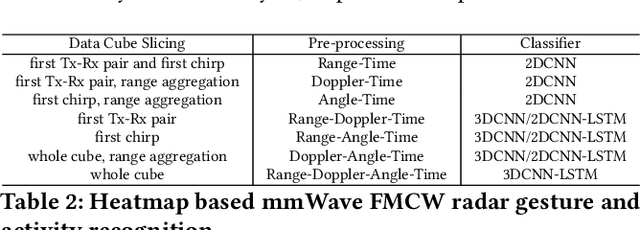
mmWave FMCW radar has attracted huge amount of research interest for human-centered applications in recent years, such as human gesture/activity recognition. Most existing pipelines are built upon conventional Discrete Fourier Transform (DFT) pre-processing and deep neural network classifier hybrid methods, with a majority of previous works focusing on designing the downstream classifier to improve overall accuracy. In this work, we take a step back and look at the pre-processing module. To avoid the drawbacks of conventional DFT pre-processing, we propose a learnable pre-processing module, named CubeLearn, to directly extract features from raw radar signal and build an end-to-end deep neural network for mmWave FMCW radar motion recognition applications. Extensive experiments show that our CubeLearn module consistently improves the classification accuracies of different pipelines, especially benefiting those previously weaker models. We provide ablation studies on initialization methods and structure of the proposed module, as well as an evaluation of the running time on PC and edge devices. This work also serves as a comparison of different approaches towards data cube slicing. Through our task agnostic design, we propose a first step towards a generic end-to-end solution for radar recognition problems.
AutoPlace: Robust Place Recognition with Low-cost Single-chip Automotive Radar
Sep 17, 2021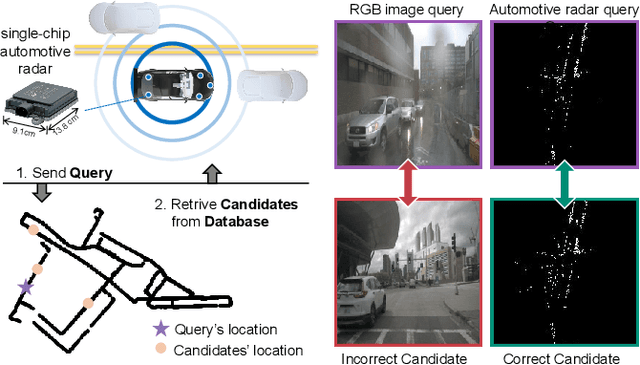
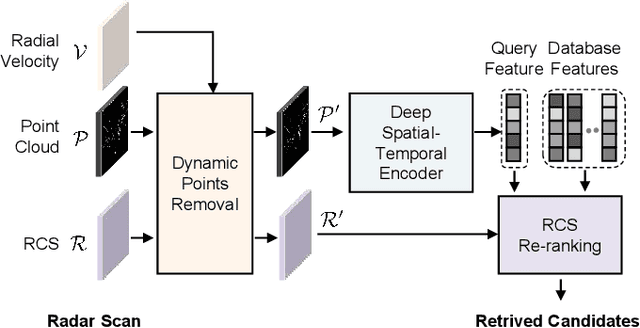
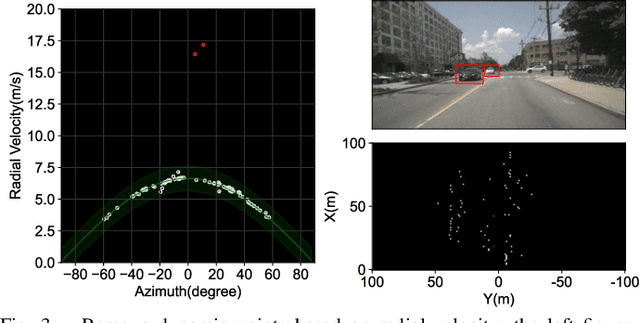
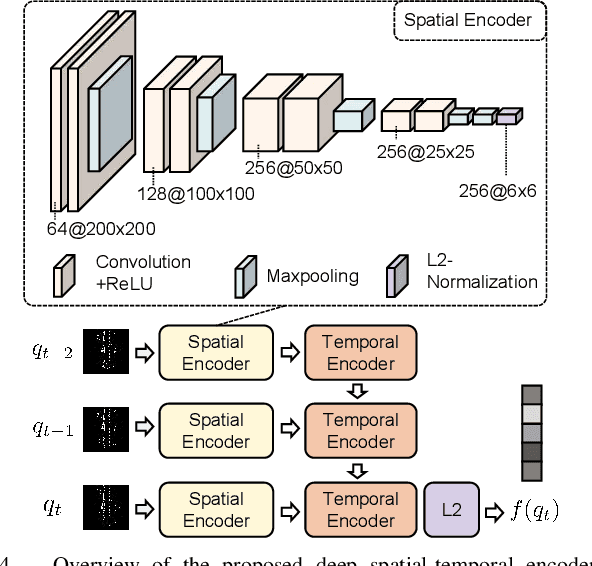
This paper presents a novel place recognition approach to autonomous vehicles by using low-cost, single-chip automotive radar. Aimed at improving recognition robustness and fully exploiting the rich information provided by this emerging automotive radar, our approach follows a principled pipeline that comprises (1) dynamic points removal from instant Doppler measurement, (2) spatial-temporal feature embedding on radar point clouds, and (3) retrieved candidates refinement from Radar Cross Section measurement. Extensive experimental results on the public nuScenes dataset demonstrate that existing visual/LiDAR/spinning radar place recognition approaches are less suitable for single-chip automotive radar. In contrast, our purpose-built approach for automotive radar consistently outperforms a variety of baseline methods via a comprehensive set of metrics, providing insights into the efficacy when used in a realistic system.
Graph-based Thermal-Inertial SLAM with Probabilistic Neural Networks
Apr 18, 2021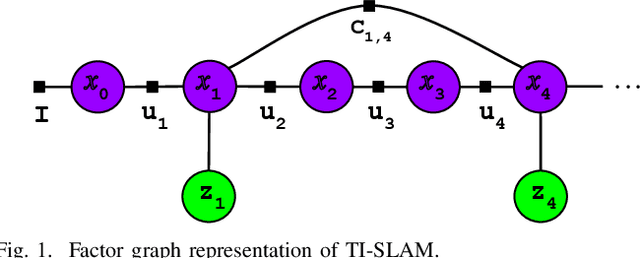
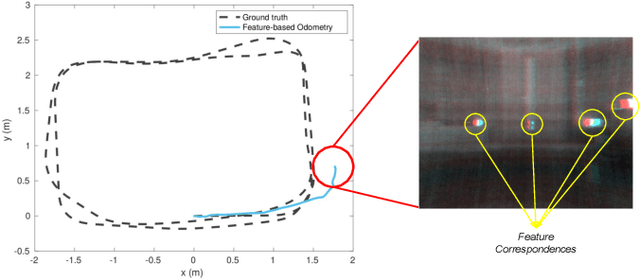
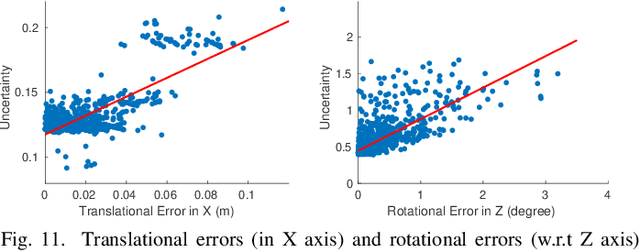
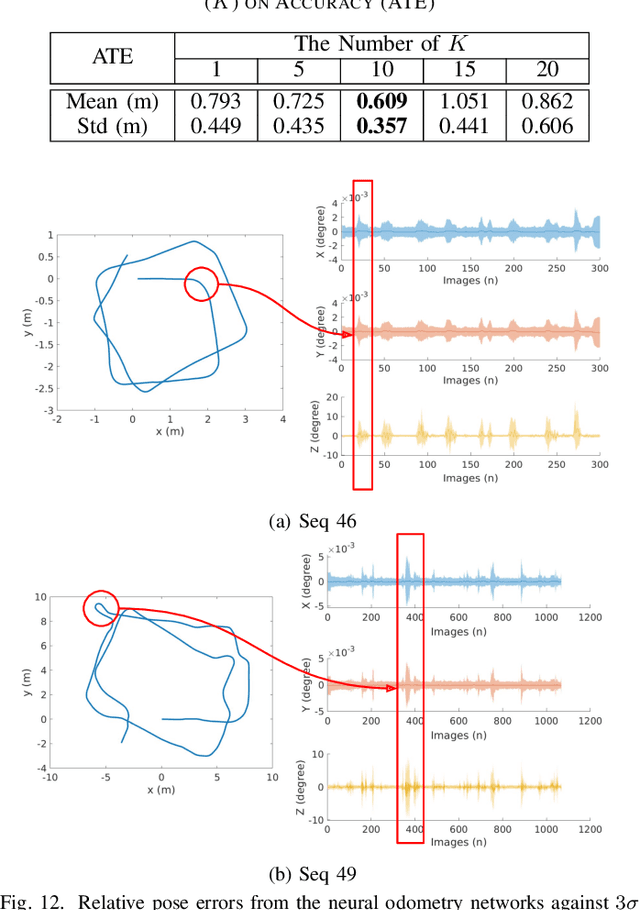
Simultaneous Localization and Mapping (SLAM) system typically employ vision-based sensors to observe the surrounding environment. However, the performance of such systems highly depends on the ambient illumination conditions. In scenarios with adverse visibility or in the presence of airborne particulates (e.g. smoke, dust, etc.), alternative modalities such as those based on thermal imaging and inertial sensors are more promising. In this paper, we propose the first complete thermal-inertial SLAM system which combines neural abstraction in the SLAM front end with robust pose graph optimization in the SLAM back end. We model the sensor abstraction in the front end by employing probabilistic deep learning parameterized by Mixture Density Networks (MDN). Our key strategies to successfully model this encoding from thermal imagery are the usage of normalized 14-bit radiometric data, the incorporation of hallucinated visual (RGB) features, and the inclusion of feature selection to estimate the MDN parameters. To enable a full SLAM system, we also design an efficient global image descriptor which is able to detect loop closures from thermal embedding vectors. We performed extensive experiments and analysis using three datasets, namely self-collected ground robot and handheld data taken in indoor environment, and one public dataset (SubT-tunnel) collected in underground tunnel. Finally, we demonstrate that an accurate thermal-inertial SLAM system can be realized in conditions of both benign and adverse visibility.
P2-Net: Joint Description and Detection of Local Features for Pixel and Point Matching
Mar 01, 2021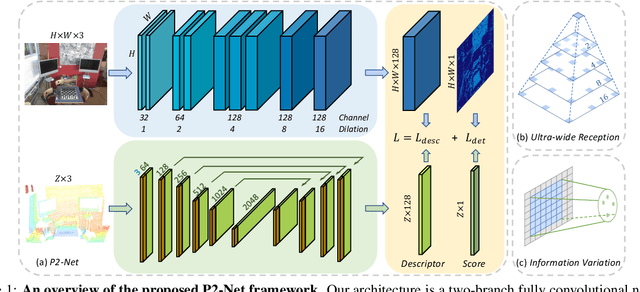
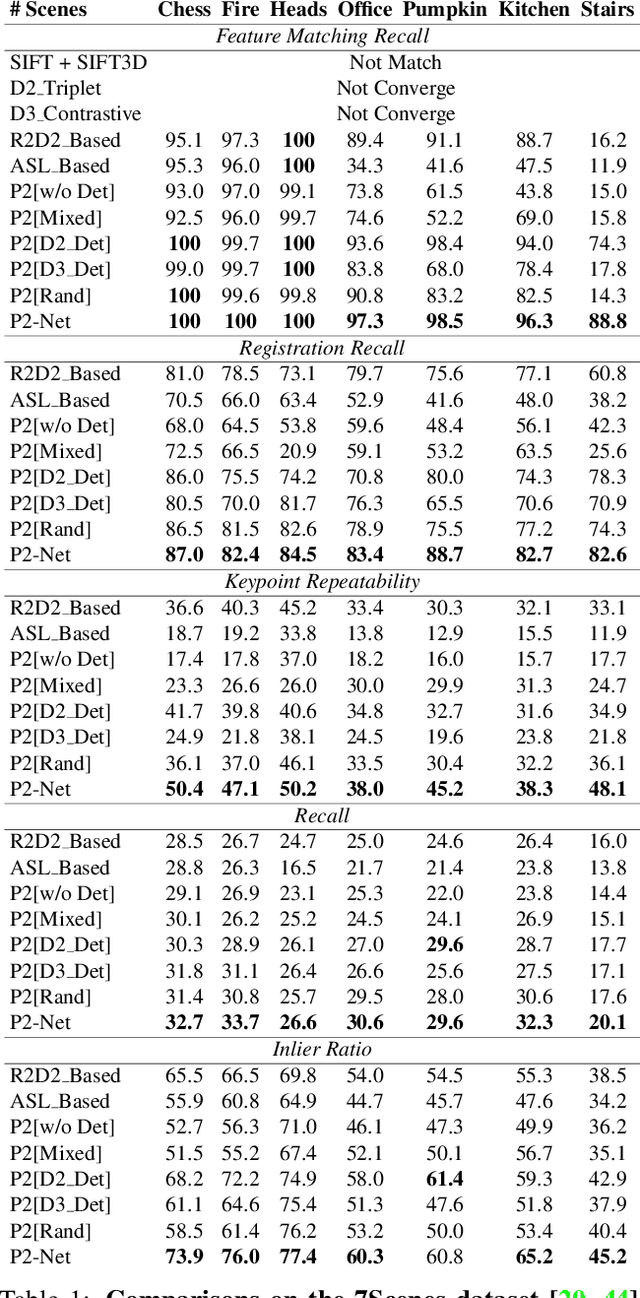
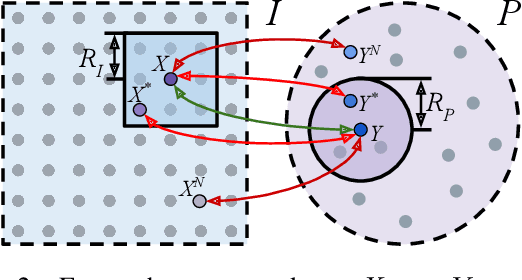
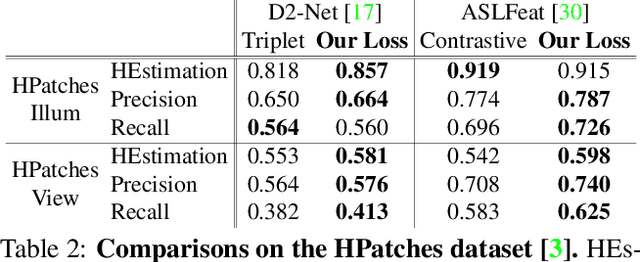
Accurately describing and detecting 2D and 3D keypoints is crucial to establishing correspondences across images and point clouds. Despite a plethora of learning-based 2D or 3D local feature descriptors and detectors having been proposed, the derivation of a shared descriptor and joint keypoint detector that directly matches pixels and points remains under-explored by the community. This work takes the initiative to establish fine-grained correspondences between 2D images and 3D point clouds. In order to directly match pixels and points, a dual fully convolutional framework is presented that maps 2D and 3D inputs into a shared latent representation space to simultaneously describe and detect keypoints. Furthermore, an ultra-wide reception mechanism in combination with a novel loss function are designed to mitigate the intrinsic information variations between pixel and point local regions. Extensive experimental results demonstrate that our framework shows competitive performance in fine-grained matching between images and point clouds and achieves state-of-the-art results for the task of indoor visual localization. Our source code will be available at [no-name-for-blind-review].
Deep Inertial Odometry with Accurate IMU Preintegration
Jan 18, 2021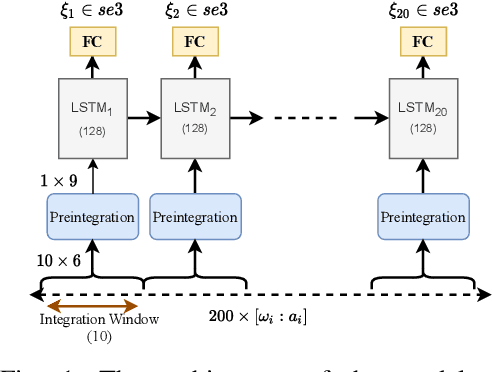
Inertial Measurement Units (IMUs) are interceptive modalities that provide ego-motion measurements independent of the environmental factors. They are widely adopted in various autonomous systems. Motivated by the limitations in processing the noisy measurements from these sensors using their mathematical models, researchers have recently proposed various deep learning architectures to estimate inertial odometry in an end-to-end manner. Nevertheless, the high-frequency and redundant measurements from IMUs lead to long raw sequences to be processed. In this study, we aim to investigate the efficacy of accurate preintegration as a more realistic solution to the IMU motion model for deep inertial odometry (DIO) and the resultant DIO is a fusion of model-driven and data-driven approaches. The accurate IMU preintegration has the potential to outperform numerical approximation of the continuous IMU model used in the existing DIOs. Experimental results validate the proposed DIO.
3-D Motion Capture of an Unmodified Drone with Single-chip Millimeter Wave Radar
Nov 13, 2020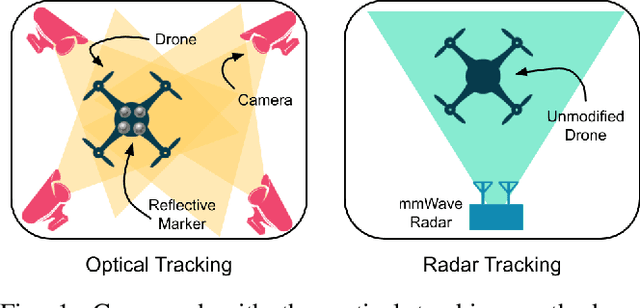
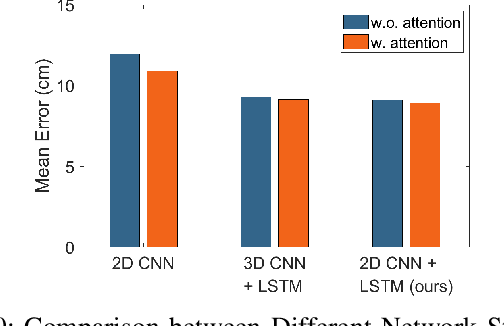
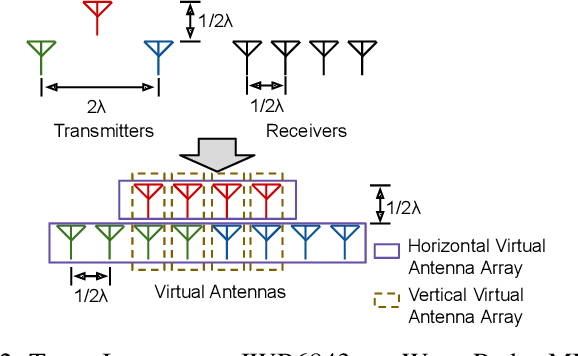
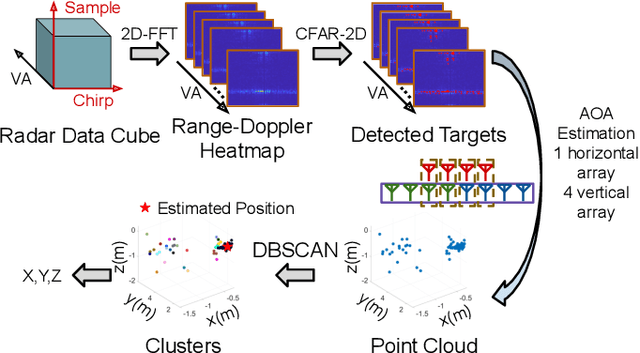
Accurate motion capture of aerial robots in 3-D is a key enabler for autonomous operation in indoor environments such as warehouses or factories, as well as driving forward research in these areas. The most commonly used solutions at present are optical motion capture (e.g. VICON) and Ultrawideband (UWB), but these are costly and cumbersome to deploy, due to their requirement of multiple cameras/sensors spaced around the tracking area. They also require the drone to be modified to carry an active or passive marker. In this work, we present an inexpensive system that can be rapidly installed, based on single-chip millimeter wave (mmWave) radar. Importantly, the drone does not need to be modified or equipped with any markers, as we exploit the Doppler signals from the rotating propellers. Furthermore, 3-D tracking is possible from a single point, greatly simplifying deployment. We develop a novel deep neural network and demonstrate decimeter level 3-D tracking at 10Hz, achieving better performance than classical baselines. Our hope is that this low-cost system will act to catalyse inexpensive drone research and increased autonomy.
Demo Abstract: Indoor Positioning System in Visually-Degraded Environments with Millimetre-Wave Radar and Inertial Sensors
Oct 26, 2020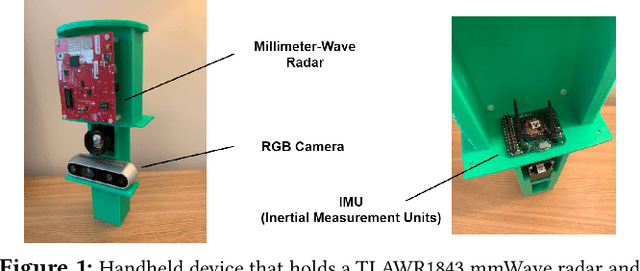
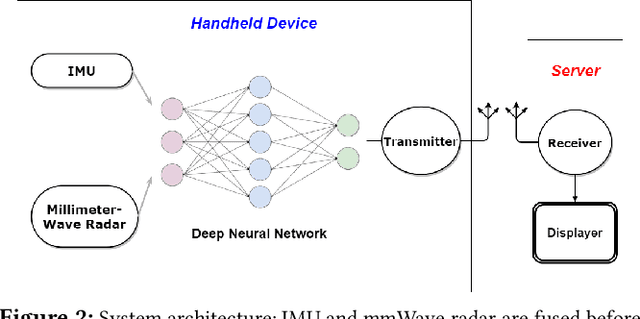
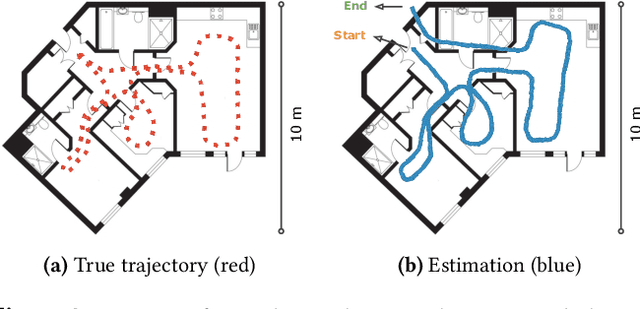
Positional estimation is of great importance in the public safety sector. Emergency responders such as fire fighters, medical rescue teams, and the police will all benefit from a resilient positioning system to deliver safe and effective emergency services. Unfortunately, satellite navigation (e.g., GPS) offers limited coverage in indoor environments. It is also not possible to rely on infrastructure based solutions. To this end, wearable sensor-aided navigation techniques, such as those based on camera and Inertial Measurement Units (IMU), have recently emerged recently as an accurate, infrastructure-free solution. Together with an increase in the computational capabilities of mobile devices, motion estimation can be performed in real-time. In this demonstration, we present a real-time indoor positioning system which fuses millimetre-wave (mmWave) radar and IMU data via deep sensor fusion. We employ mmWave radar rather than an RGB camera as it provides better robustness to visual degradation (e.g., smoke, darkness, etc.) while at the same time requiring lower computational resources to enable runtime computation. We implemented the sensor system on a handheld device and a mobile computer running at 10 FPS to track a user inside an apartment. Good accuracy and resilience were exhibited even in poorly illuminated scenes.
A Survey on Deep Learning for Localization and Mapping: Towards the Age of Spatial Machine Intelligence
Jun 29, 2020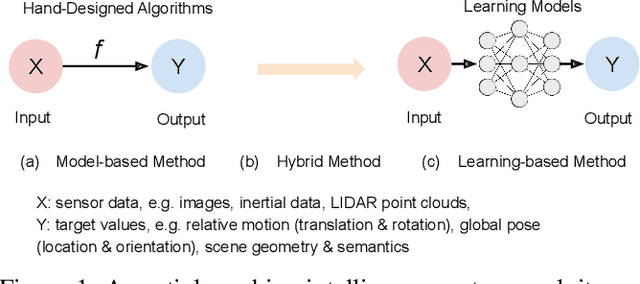
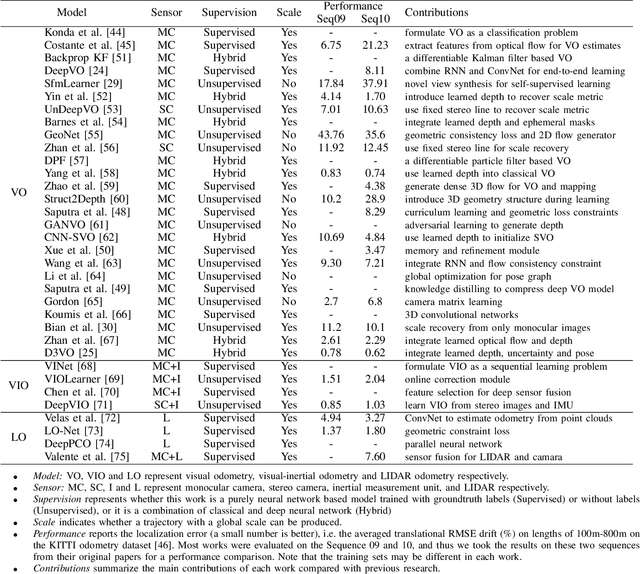
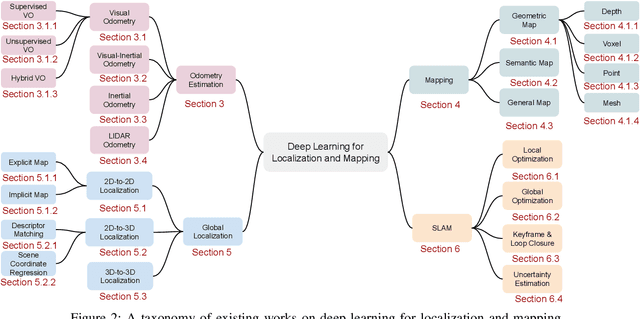
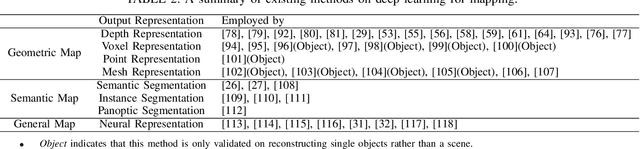
Deep learning based localization and mapping has recently attracted significant attention. Instead of creating hand-designed algorithms through exploitation of physical models or geometric theories, deep learning based solutions provide an alternative to solve the problem in a data-driven way. Benefiting from ever-increasing volumes of data and computational power, these methods are fast evolving into a new area that offers accurate and robust systems to track motion and estimate scenes and their structure for real-world applications. In this work, we provide a comprehensive survey, and propose a new taxonomy for localization and mapping using deep learning. We also discuss the limitations of current models, and indicate possible future directions. A wide range of topics are covered, from learning odometry estimation, mapping, to global localization and simultaneous localization and mapping (SLAM). We revisit the problem of perceiving self-motion and scene understanding with on-board sensors, and show how to solve it by integrating these modules into a prospective spatial machine intelligence system (SMIS). It is our hope that this work can connect emerging works from robotics, computer vision and machine learning communities, and serve as a guide for future researchers to apply deep learning to tackle localization and mapping problems.
milliEgo: mmWave Aided Egomotion Estimation with Deep Sensor Fusion
Jun 03, 2020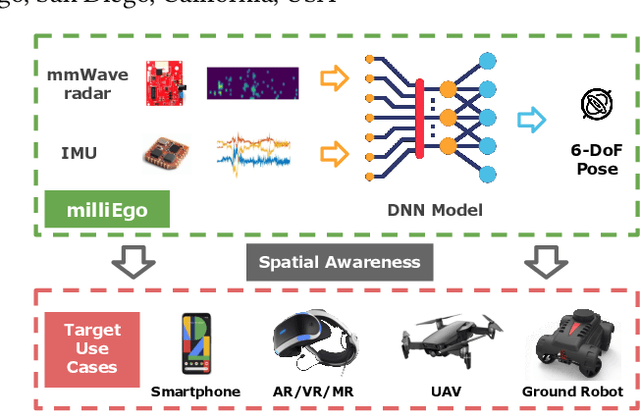
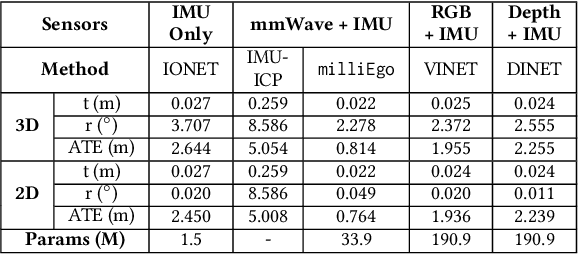
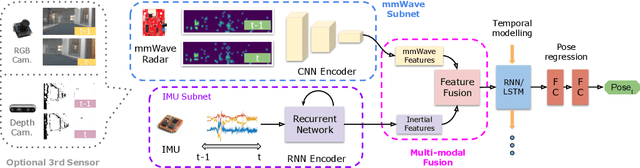
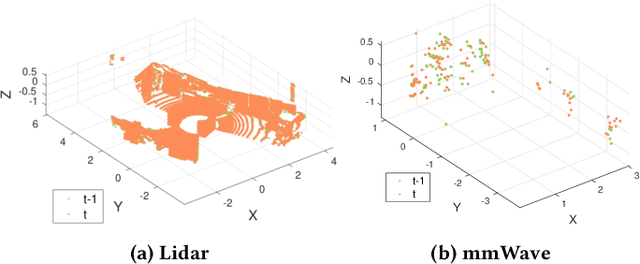
Robust and accurate trajectory estimation of mobile agents such as people and robots is a key requirement for providing spatial awareness to emerging capabilities such as augmented reality or autonomous interaction. Although currently dominated by vision based techniques e.g., visual-inertial odometry, these suffer from challenges with scene illumination or featureless surfaces. As an alternative, we propose \sysname, a novel deep-learning approach to robust egomotion estimation which exploits the capabilities of low-cost mmWave radar. Although mmWave radar has a fundamental advantage over monocular cameras of being metric i.e., providing absolute scale or depth, current single chip solutions have limited and sparse imaging resolution, making existing point-cloud registration techniques brittle. We propose a new architecture that is optimized for solving this underdetermined pose transformation problem. Secondly, to robustly fuse mmWave pose estimates with additional sensors, e.g. inertial or visual sensor we introduce a mixed attention approach to deep fusion. Through extensive experiments, we demonstrate how mmWave radar outperforms existing state-of-the-art odometry techniques. We also show that the neural architecture can be made highly efficient and suitable for real-time embedded applications.