 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-Guided Multi-Arm Motion Planning
Sep 09, 2025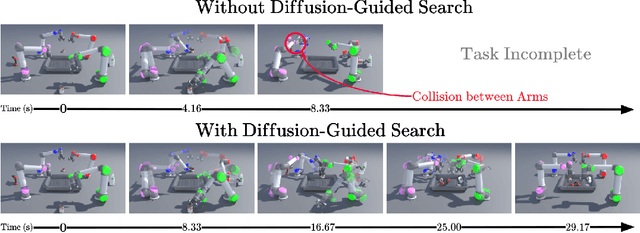
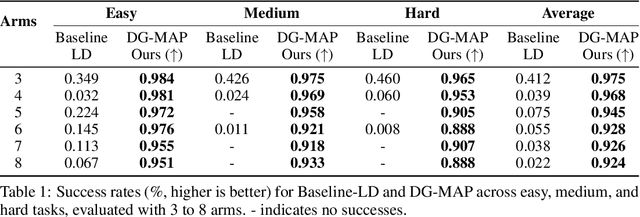
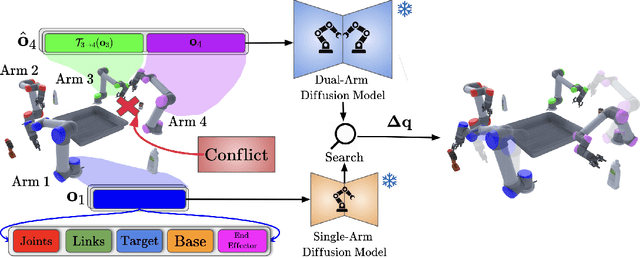
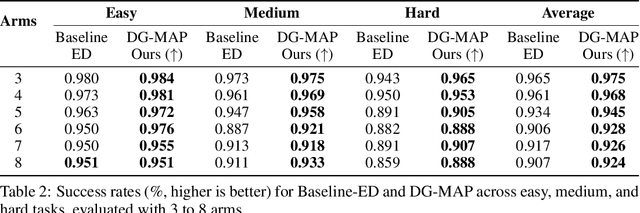
Multi-arm motion planning is fundamental for enabling arms to complete complex long-horizon tasks in shared spaces efficiently but current methods struggle with scalability due to exponential state-space growth and reliance on large training datasets for learned models. Inspired by Multi-Agent Path Finding (MAPF), which decomposes planning into single-agent problems coupled with collision resolution, we propose a novel diffusion-guided multi-arm planner (DG-MAP) that enhances scalability of learning-based models while reducing their reliance on massive multi-arm datasets. Recognizing that collisions are primarily pairwise, we train two conditional diffusion models, one to generate feasible single-arm trajectories, and a second, to model the dual-arm dynamics required for effective pairwise collision resolution. By integrating these specialized generative models within a MAPF-inspired structured decomposition, our planner efficiently scales to larger number of arms. Evaluations against alternative learning-based methods across various team sizes demonstrate our method's effectiveness and practical applicability. Project website can be found at https://diff-mapf-mers.csail.mit.edu
Risk-Bounded Multi-Agent Visual Navigation via Dynamic Budget Allocation
Sep 09, 2025Safe navigation is essential for autonomous systems operating in hazardous environments, especially when multiple agents must coordinate using just visual inputs over extended time horizons. Traditional planning methods excel at solving long-horizon tasks but rely on predefined distance metrics, while safe Reinforcement Learning (RL) can learn complex behaviors using high-dimensional inputs yet struggles with multi-agent, goal-conditioned scenarios. Recent work combined these paradigms by leveraging goal-conditioned RL (GCRL) to build an intermediate graph from replay buffer states, pruning unsafe edges, and using Conflict-Based Search (CBS) for multi-agent path planning. Although effective, this graph-pruning approach can be overly conservative, limiting mission efficiency by precluding missions that must traverse high-risk regions. To address this limitation, we propose RB-CBS, a novel extension to CBS that dynamically allocates and adjusts user-specified risk bound ($\Delta$) across agents to flexibly trade off safety and speed. Our improved planner ensures that each agent receives a local risk budget ($\delta$) enabling more efficient navigation while still respecting overall safety constraints. Experimental results demonstrate that this iterative risk-allocation framework yields superior performance in complex environments, allowing multiple agents to find collision-free paths within the user-specified $\Delta$.
LaPlaSS: Latent Space Planning for Stochastic Systems
Apr 10, 2024



Autonomous mobile agents often operate in hazardous environments, necessitating an awareness of safety. These agents can have non-linear, stochastic dynamics that must be considered during planning to guarantee bounded risk. Most state of the art methods require closed-form dynamics to verify plan correctness and safety however modern robotic systems often have dynamics that are learned from data. Thus, there is a need to perform efficient trajectory planning with guarantees on risk for agents without known dynamics models. We propose a "generate-and-test" approach to risk-bounded planning in which a planner generates a candidate trajectory using an approximate linear dynamics model and a validator assesses the risk of the trajectory, computing additional safety constraints for the planner if the candidate does not satisfy the desired risk bound. To acquire the approximate model, we use a variational autoencoder to learn a latent linear dynamics model and encode the planning problem into the latent space to generate the candidate trajectory. The VAE also serves to sample trajectories around the candidate to use in the validator. We demonstrate that our algorithm, LaPlaSS, is able to generate trajectory plans with bounded risk for a real-world agent with learned dynamics and is an order of magnitude more efficient than the state of the art.
Adaptation and Communication in Human-Robot Teaming to Handle Discrepancies in Agents' Beliefs about Plans
Jul 07, 2023



When agents collaborate on a task, it is important that they have some shared mental model of the task routines -- the set of feasible plans towards achieving the goals. However, in reality, situations often arise that such a shared mental model cannot be guaranteed, such as in ad-hoc teams where agents may follow different conventions or when contingent constraints arise that only some agents are aware of. Previous work on human-robot teaming has assumed that the team has a set of shared routines, which breaks down in these situations. In this work, we leverage epistemic logic to enable agents to understand the discrepancy in each other's beliefs about feasible plans and dynamically plan their actions to adapt or communicate to resolve the discrepancy. We propose a formalism that extends conditional doxastic logic to describe knowledge bases in order to explicitly represent agents' nested beliefs on the feasible plans and state of execution. We provide an online execution algorithm based on Monte Carlo Tree Search for the agent to plan its action, including communication actions to explain the feasibility of plans, announce intent, and ask questions. Finally, we evaluate the success rate and scalability of the algorithm and show that our agent is better equipped to work in teams without the guarantee of a shared mental model.
P4P: Conflict-Aware Motion Prediction for Planning in Autonomous Driving
Nov 03, 2022Motion prediction is crucial in enabling safe motion planning for autonomous vehicles in interactive scenarios. It allows the planner to identify potential conflicts with other traffic agents and generate safe plans. Existing motion predictors often focus on reducing prediction errors, yet it remains an open question on how well they help identify the conflicts for the planner. In this paper, we evaluate state-of-the-art predictors through novel conflict-related metrics, such as the success rate of identifying conflicts. Surprisingly, the predictors suffer from a low success rate and thus lead to a large percentage of collisions when we test the prediction-planning system in an interactive simulator. To fill the gap, we propose a simple but effective alternative that combines a physics-based trajectory generator and a learning-based relation predictor to identify conflicts and infer conflict relations. We demonstrate that our predictor, P4P, achieves superior performance over existing learning-based predictors in realistic interactive driving scenarios from Waymo Open Motion Dataset.
InterSim: Interactive Traffic Simulation via Explicit Relation Modeling
Oct 26, 2022



Interactive traffic simulation is crucial to autonomous driving systems by enabling testing for planners in a more scalable and safe way compared to real-world road testing. Existing approaches learn an agent model from large-scale driving data to simulate realistic traffic scenarios, yet it remains an open question to produce consistent and diverse multi-agent interactive behaviors in crowded scenes. In this work, we present InterSim, an interactive traffic simulator for testing autonomous driving planners. Given a test plan trajectory from the ego agent, InterSim reasons about the interaction relations between the agents in the scene and generates realistic trajectories for each environment agent that are consistent with the relations. We train and validate our model on a large-scale interactive driving dataset. Experiment results show that InterSim achieves better simulation realism and reactivity in two simulation tasks compared to a state-of-the-art learning-based traffic simulator.
Hierarchical Constrained Stochastic Shortest Path Planning via Cost Budget Allocation
May 11, 2022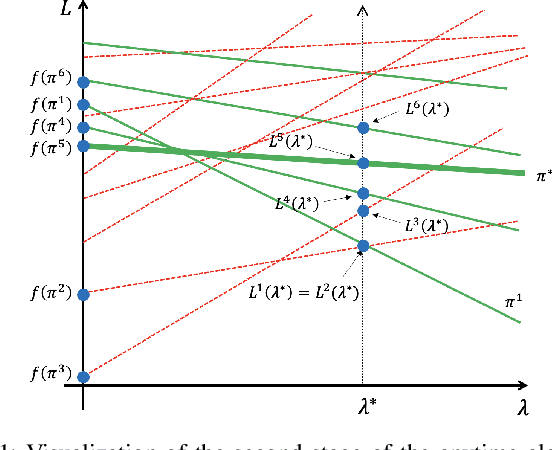
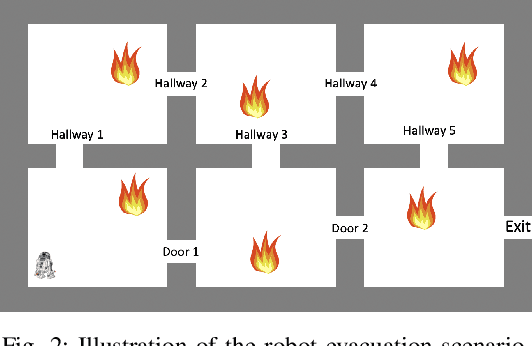
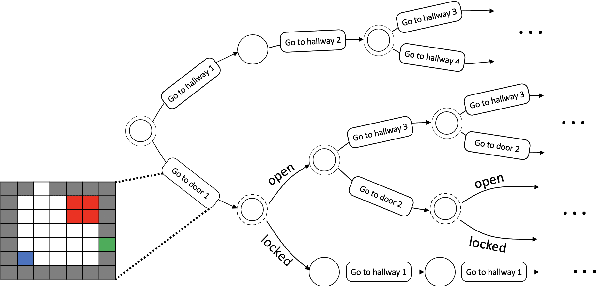
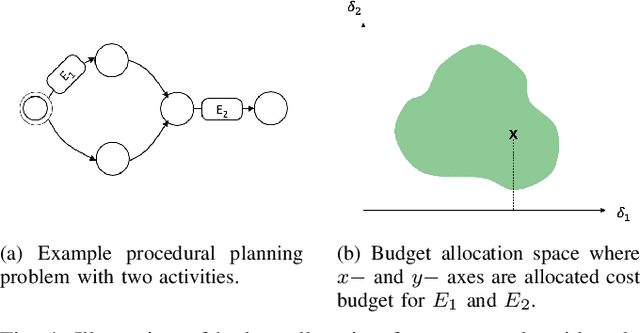
Stochastic sequential decision making often requires hierarchical structure in the problem where each high-level action should be further planned with primitive states and actions. In addition, many real-world applications require a plan that satisfies constraints on the secondary costs such as risk measure or fuel consumption. In this paper, we propose a hierarchical constrained stochastic shortest path problem (HC-SSP) that meets those two crucial requirements in a single framework. Although HC-SSP provides a useful framework to model such planning requirements in many real-world applications, the resulting problem has high complexity and makes it difficult to find an optimal solution fast which prevents user from applying it to real-time and risk-sensitive applications. To address this problem, we present an algorithm that iteratively allocates cost budget to lower level planning problems based on branch-and-bound scheme to find a feasible solution fast and incrementally update the incumbent solution. We demonstrate the proposed algorithm in an evacuation scenario and prove the advantage over a state-of-the-art mathematical programming based approach.
M2I: From Factored Marginal Trajectory Prediction to Interactive Prediction
Mar 28, 2022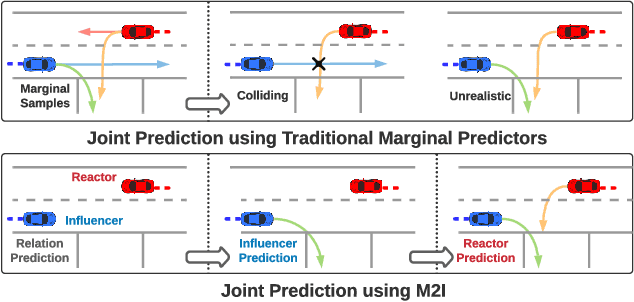
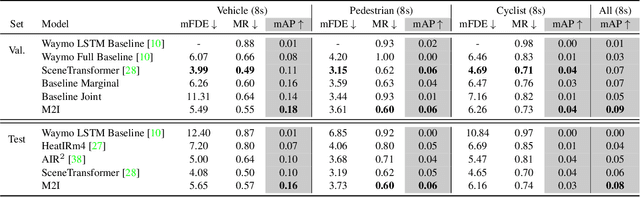
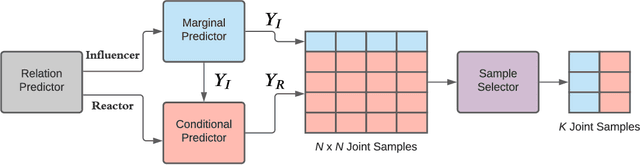
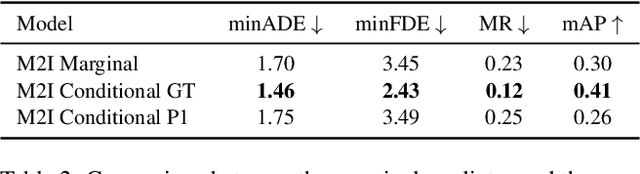
Predicting future motions of road participants is an important task for driving autonomously in urban scenes. Existing models excel at predicting marginal trajectories for single agents, yet it remains an open question to jointly predict scene compliant trajectories over multiple agents. The challenge is due to exponentially increasing prediction space as a function of the number of agents. In this work, we exploit the underlying relations between interacting agents and decouple the joint prediction problem into marginal prediction problems. Our proposed approach M2I first classifies interacting agents as pairs of influencers and reactors, and then leverages a marginal prediction model and a conditional prediction model to predict trajectories for the influencers and reactors, respectively. The predictions from interacting agents are combined and selected according to their joint likelihoods. Experiments show that our simple but effective approach achieves state-of-the-art performance on the Waymo Open Motion Dataset interactive prediction benchmark.
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems
Mar 04, 2022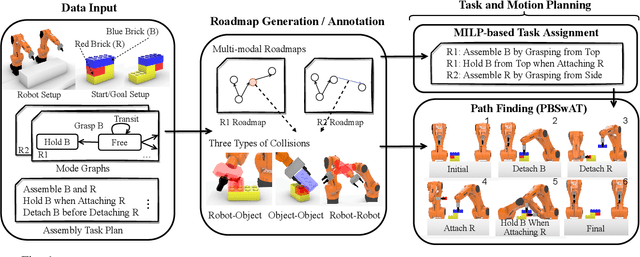
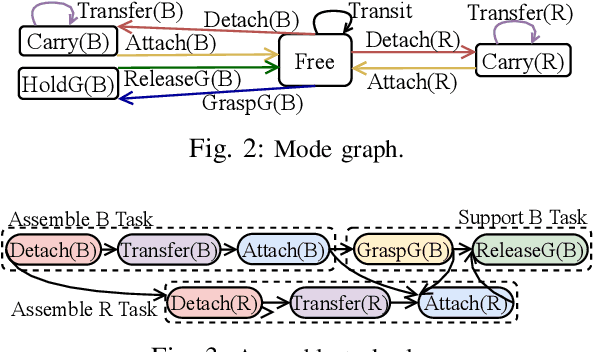
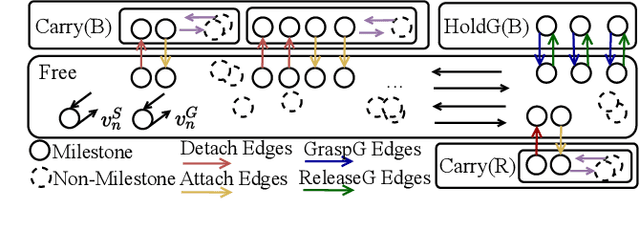
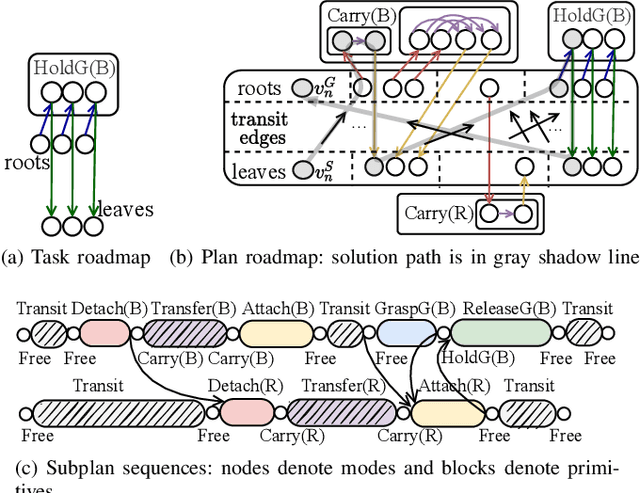
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
TIP: Task-Informed Motion Prediction for Intelligent Systems
Oct 17, 2021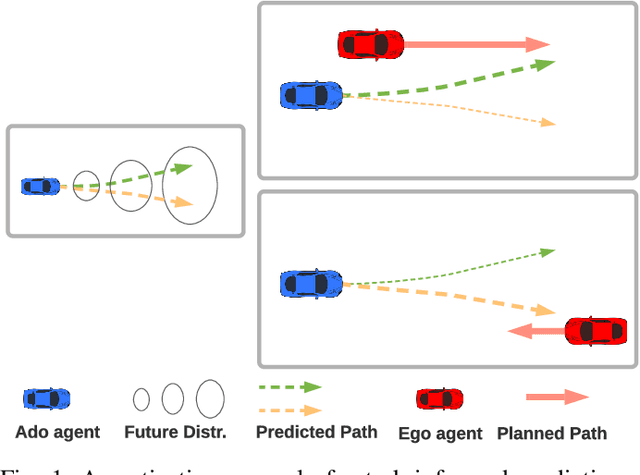
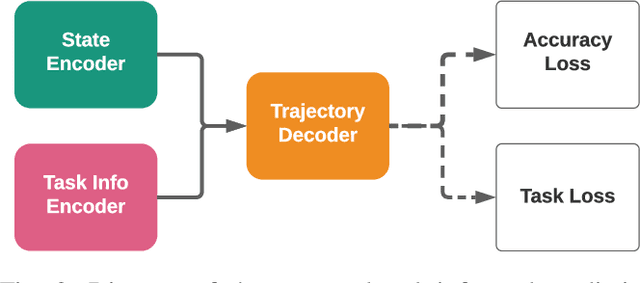
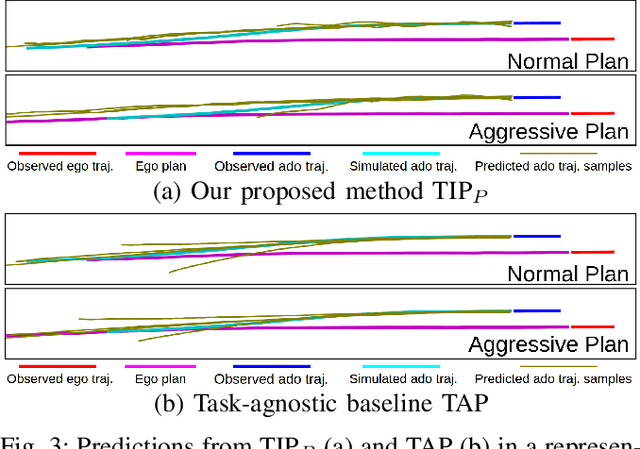
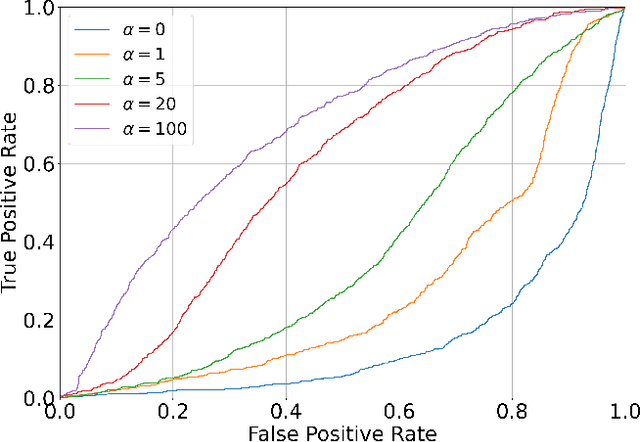
Motion prediction is important for intelligent driving systems, providing the future distributions of road agent behaviors and supporting various decision making tasks. Existing motion predictors are often optimized and evaluated via task-agnostic measures based on prediction accuracy. Such measures fail to account for the use of prediction in downstream tasks, and could result in sub-optimal task performance. We propose a task-informed motion prediction framework that jointly reasons about prediction accuracy and task utility, to better support downstream tasks through its predictions. The task utility function does not require the full task information, but rather a specification of the utility of the task, resulting in predictors that serve a wide range of downstream tasks. We demonstrate our framework on two use cases of task utilities, in the context of autonomous driving and parallel autonomy, and show the advantage of task-informed predictors over task-agnostic ones on the Waymo Open Motion dataset.