 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOcclusion Handling by Pushing for Enhanced Fruit Detection
Apr 07, 2026In agricultural robotics, effective observation and localization of fruits present challenges due to occlusions caused by other parts of the tree, such as branches and leaves. These occlusions can result in false fruit localization or impede the robot from picking the fruit. The objective of this work is to push away branches that block the fruit's view to increase their visibility. Our setup consists of an RGB-D camera and a robot arm. First, we detect the occluded fruit in the RGB image and estimate its occluded part via a deep learning generative model in the depth space. The direction to push to clear the occlusions is determined using classic image processing techniques. We then introduce a 3D extension of the 2D Hough transform to detect straight line segments in the point cloud. This extension helps detect tree branches and identify the one mainly responsible for the occlusion. Finally, we clear the occlusion by pushing the branch with the robot arm. Our method uses a combination of deep learning for fruit appearance estimation, classic image processing for push direction determination, and 3D Hough transform for branch detection. We validate our perception methods through real data under different lighting conditions and various types of fruits (i.e. apple, lemon, orange), achieving improved visibility and successful occlusion clearance. We demonstrate the practical application of our approach through a real robot branch pushing demonstration.
Temporally-Aware Supervised Contrastive Learning for Polyp Counting in Colonoscopy
Jul 03, 2025



Automated polyp counting in colonoscopy is a crucial step toward automated procedure reporting and quality control, aiming to enhance the cost-effectiveness of colonoscopy screening. Counting polyps in a procedure involves detecting and tracking polyps, and then clustering tracklets that belong to the same polyp entity. Existing methods for polyp counting rely on self-supervised learning and primarily leverage visual appearance, neglecting temporal relationships in both tracklet feature learning and clustering stages. In this work, we introduce a paradigm shift by proposing a supervised contrastive loss that incorporates temporally-aware soft targets. Our approach captures intra-polyp variability while preserving inter-polyp discriminability, leading to more robust clustering. Additionally, we improve tracklet clustering by integrating a temporal adjacency constraint, reducing false positive re-associations between visually similar but temporally distant tracklets. We train and validate our method on publicly available datasets and evaluate its performance with a leave-one-out cross-validation strategy. Results demonstrate a 2.2x reduction in fragmentation rate compared to prior approaches. Our results highlight the importance of temporal awareness in polyp counting, establishing a new state-of-the-art. Code is available at https://github.com/lparolari/temporally-aware-polyp-counting.
Interaction force estimation for tactile sensor arrays: Toward tactile-based interaction control for robotic fingers
Nov 20, 2024Accurate estimation of interaction forces is crucial for achieving fine, dexterous control in robotic systems. Although tactile sensor arrays offer rich sensing capabilities, their effective use has been limited by challenges such as calibration complexities, nonlinearities, and deformation. In this paper, we tackle these issues by presenting a novel method for obtaining 3D force estimation using tactile sensor arrays. Unlike existing approaches that focus on specific or decoupled force components, our method estimates full 3D interaction forces across an array of distributed sensors, providing comprehensive real-time feedback. Through systematic data collection and model training, our approach overcomes the limitations of prior methods, achieving accurate and reliable tactile-based force estimation. Besides, we integrate this estimation in a real-time control loop, enabling implicit, stable force regulation that is critical for precise robotic manipulation. Experimental validation on the Allegro robot hand with uSkin sensors demonstrates the effectiveness of our approach in real-time control, and its ability to enhance the robot's adaptability and dexterity.
Hard-Attention Gates with Gradient Routing for Endoscopic Image Computing
Jul 05, 2024



To address overfitting and enhance model generalization in gastroenterological polyp size assessment, our study introduces Feature-Selection Gates (FSG) or Hard-Attention Gates (HAG) alongside Gradient Routing (GR) for dynamic feature selection. This technique aims to boost Convolutional Neural Networks (CNNs) and Vision Transformers (ViTs) by promoting sparse connectivity, thereby reducing overfitting and enhancing generalization. HAG achieves this through sparsification with learnable weights, serving as a regularization strategy. GR further refines this process by optimizing HAG parameters via dual forward passes, independently from the main model, to improve feature re-weighting. Our evaluation spanned multiple datasets, including CIFAR-100 for a broad impact assessment and specialized endoscopic datasets (REAL-Colon, Misawa, and SUN) focusing on polyp size estimation, covering over 200 polyps in more than 370,000 frames. The findings indicate that our HAG-enhanced networks substantially enhance performance in both binary and triclass classification tasks related to polyp sizing. Specifically, CNNs experienced an F1 Score improvement to 87.8% in binary classification, while in triclass classification, the ViT-T model reached an F1 Score of 76.5%, outperforming traditional CNNs and ViT-T models. To facilitate further research, we are releasing our codebase, which includes implementations for CNNs, multistream CNNs, ViT, and HAG-augmented variants. This resource aims to standardize the use of endoscopic datasets, providing public training-validation-testing splits for reliable and comparable research in gastroenterological polyp size estimation. The codebase is available at github.com/cosmoimd/feature-selection-gates.
* Attention Gates, Hard-Attention Gates, Gradient Routing, Feature Selection Gates, Endoscopy, Medical Image Processing, Computer Vision
REAL-Colon: A dataset for developing real-world AI applications in colonoscopy
Mar 04, 2024Detection and diagnosis of colon polyps are key to preventing colorectal cancer. Recent evidence suggests that AI-based computer-aided detection (CADe) and computer-aided diagnosis (CADx) systems can enhance endoscopists' performance and boost colonoscopy effectiveness. However, most available public datasets primarily consist of still images or video clips, often at a down-sampled resolution, and do not accurately represent real-world colonoscopy procedures. We introduce the REAL-Colon (Real-world multi-center Endoscopy Annotated video Library) dataset: a compilation of 2.7M native video frames from sixty full-resolution, real-world colonoscopy recordings across multiple centers. The dataset contains 350k bounding-box annotations, each created under the supervision of expert gastroenterologists. Comprehensive patient clinical data, colonoscopy acquisition information, and polyp histopathological information are also included in each video. With its unprecedented size, quality, and heterogeneity, the REAL-Colon dataset is a unique resource for researchers and developers aiming to advance AI research in colonoscopy. Its openness and transparency facilitate rigorous and reproducible research, fostering the development and benchmarking of more accurate and reliable colonoscopy-related algorithms and models.
Towards vision-based dual arm robotic fruit harvesting
Jun 16, 2023Interest in agricultural robotics has increased considerably in recent years due to benefits such as improvement in productivity and labor reduction. However, current problems associated with unstructured environments make the development of robotic harvesters challenging. Most research in agricultural robotics focuses on single arm manipulation. Here, we propose a dual-arm approach. We present a dual-arm fruit harvesting robot equipped with a RGB-D camera, cutting and collecting tools. We exploit the cooperative task description to maximize the capabilities of the dual-arm robot. We designed a Hierarchical Quadratic Programming based control strategy to fulfill the set of hard constrains related to the robot and environment: robot joint limits, robot self-collisions, robot-fruit and robot-tree collisions. We combine deep learning and standard image processing algorithms to detect and track fruits as well as the tree trunk in the scene. We validate our perception methods on real-world RGB-D images and our control method on simulated experiments.
Can robots mold soft plastic materials by shaping depth images?
Jun 16, 2023Can robots mold soft plastic materials by shaping depth images? The short answer is no: current day robots can't. In this article, we address the problem of shaping plastic material with an anthropomorphic arm/hand robot, which observes the material with a fixed depth camera. Robots capable of molding could assist humans in many tasks, such as cooking, scooping or gardening. Yet, the problem is complex, due to its high-dimensionality at both perception and control levels. To address it, we design three alternative data-based methods for predicting the effect of robot actions on the material. Then, the robot can plan the sequence of actions and their positions, to mold the material into a desired shape. To make the prediction problem tractable, we rely on two original ideas. First, we prove that under reasonable assumptions, the shaping problem can be mapped from point cloud to depth image space, with many benefits (simpler processing, no need for registration, lower computation time and memory requirements). Second, we design a novel, simple metric for quickly measuring the distance between two depth images. The metric is based on the inherent point cloud representation of depth images, which enables direct and consistent comparison of image pairs through a non-uniform scaling approach, and therefore opens promising perspectives for designing \textit{depth image -- based} robot controllers. We assess our approach in a series of unprecedented experiments, where a robotic arm/hand molds flour from initial to final shapes, either with its own dataset, or by transfer learning from a human dataset. We conclude the article by discussing the limitations of our framework and those of current day hardware, which make human-like robot molding a challenging open research problem.
Challenges and Outlook in Robotic Manipulation of Deformable Objects
May 04, 2021
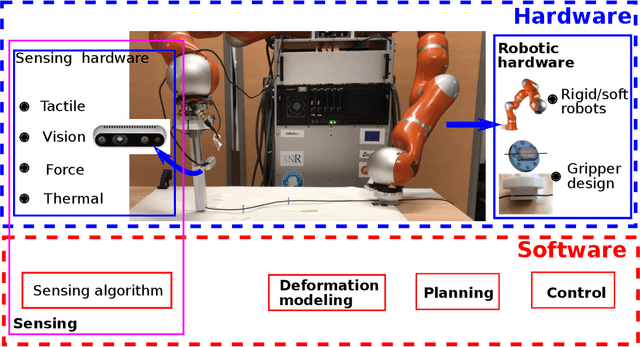
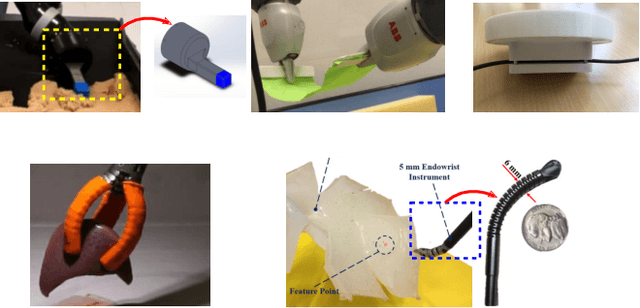
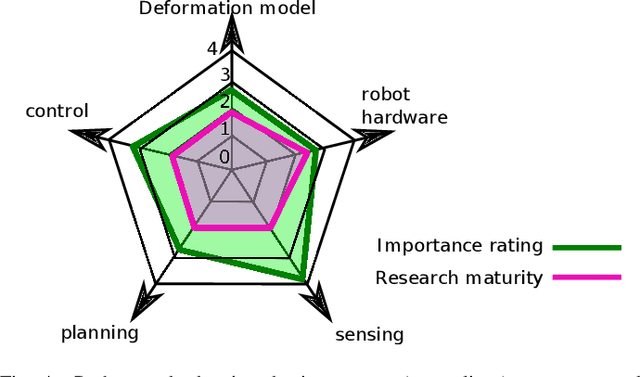
Deformable object manipulation (DOM) is an emerging research problem in robotics. The ability to manipulate deformable objects endows robots with higher autonomy and promises new applications in the industrial, services, and healthcare sectors. However, compared to rigid object manipulation, the manipulation of deformable objects is considerably more complex and is still an open research problem. Tackling the challenges in DOM demands breakthroughs in almost all aspects of robotics, namely hardware design, sensing, deformation modeling, planning, and control. In this article, we highlight the main challenges that arise by considering deformation and review recent advances in each sub-field. A particular focus of our paper lies in the discussions of these challenges and proposing promising directions of research.
On Radiation-Based Thermal Servoing: New Models, Controls and Experiments
Dec 24, 2020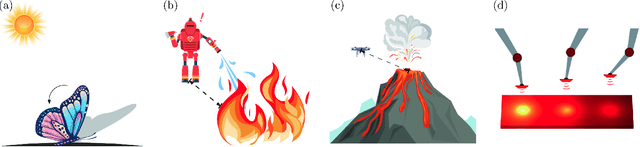
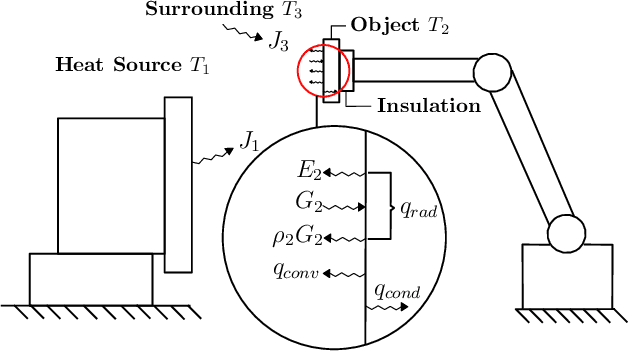
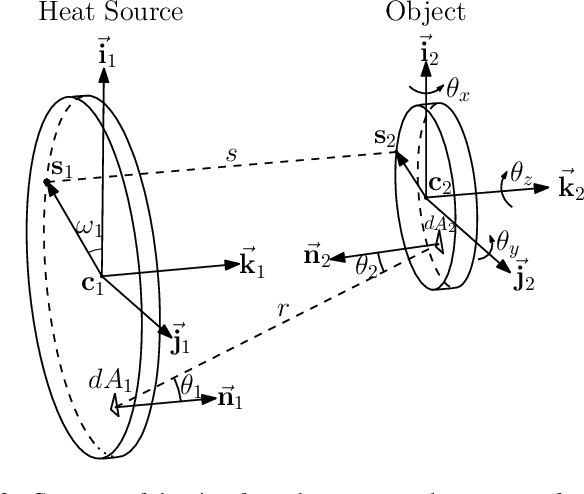
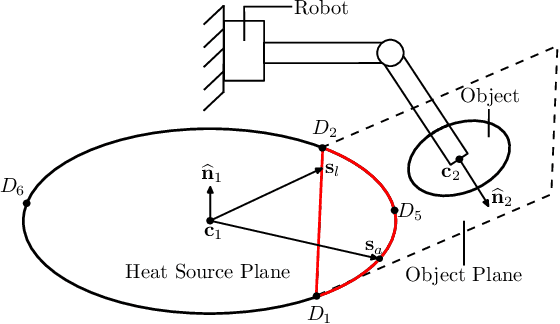
In this paper, we introduce a new sensor-based control method that regulates (by means of robot motions) the heat transfer between a radiative source and an object of interest. This valuable sensorimotor capability is needed in many industrial, dermatology and field robot applications, and it is an essential component for creating machines with advanced thermo-motor intelligence. To this end, we derive a geometric-thermal-motor model which describes the relationship between the robot's active configuration and the produced dynamic thermal response. We then use the model to guide the design of two new thermal servoing controllers (one model-based and one adaptive), and analyze their stability with Lyapunov theory. To validate our method, we report a detailed experimental study with a robotic manipulator conducting autonomous thermal servoing tasks. To the best of the authors' knowledge, this is the first time that temperature regulation has been formulated as a motion control problem for robots.
Sensor-Based Control for Collaborative Robots: Fundamentals, Challenges and Opportunities
Jul 04, 2020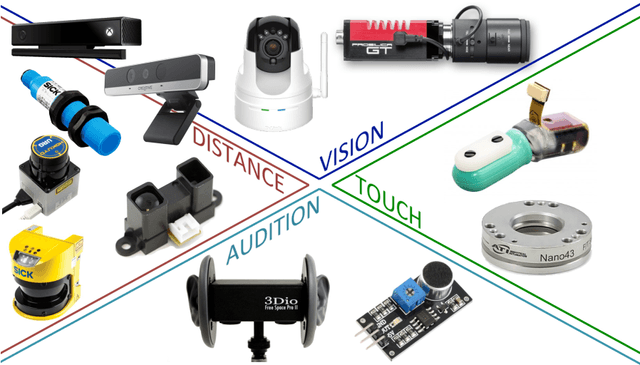
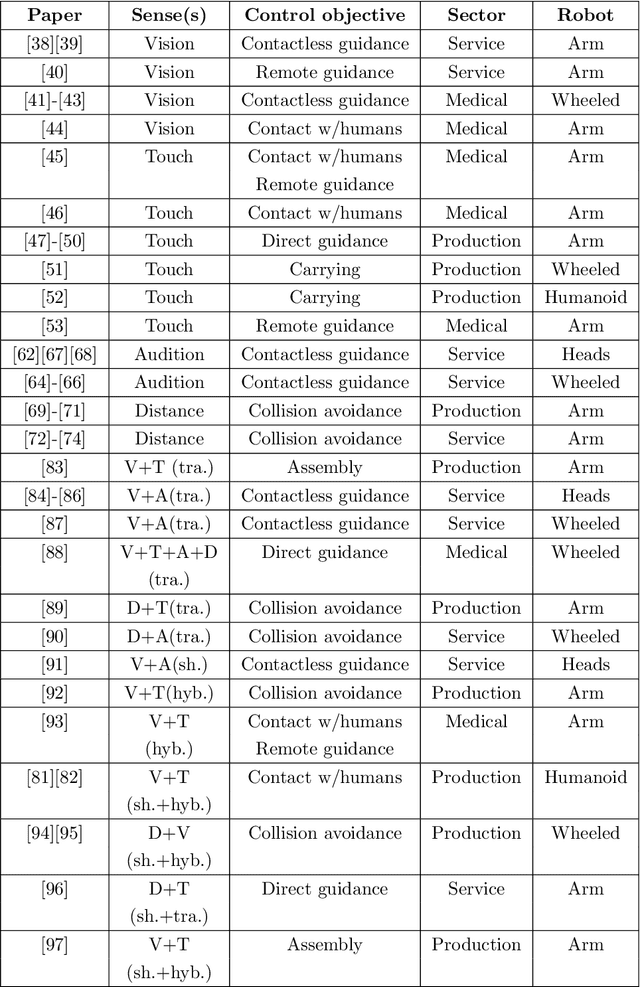
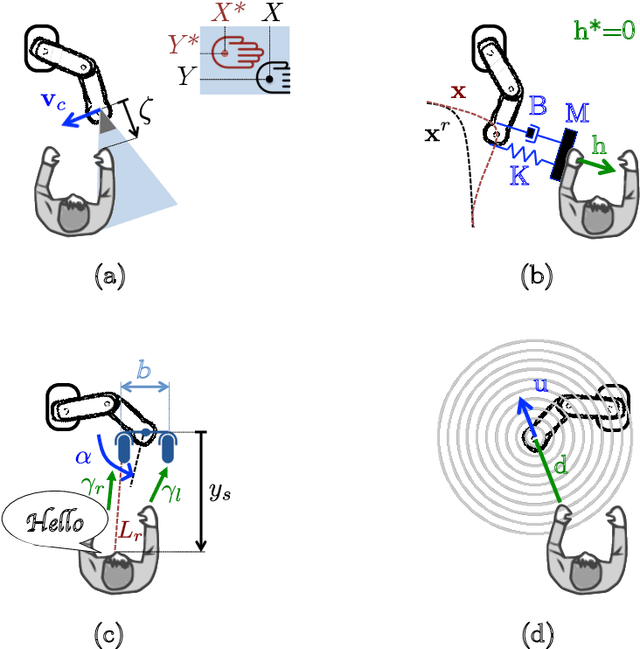
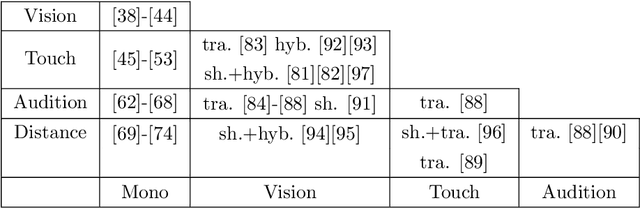
The objective of this paper is to present a systematic review of existing sensor-based control methodologies for applications that involve direct interaction between humans and robots, in the form of either physical collaboration or safe coexistence. To this end, we first introduce the basic formulation of the sensor-servo problem, then present the most common approaches: vision-based, touch-based, audio-based, and distance-based control. Afterwards, we discuss and formalize the methods that integrate heterogeneous sensors at the control level. The surveyed body of literature is classified according to the type of sensor, to the way multiple measurements are combined, and to the target objectives and applications. Finally, we discuss open problems, potential applications, and future research directions.