 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQDTraj: Exploration of Diverse Trajectory Primitives for Articulated Objects Robotic Manipulation
Apr 24, 2026Thanks to the latest advances in learning and robotics, domestic robots are beginning to enter homes, aiming to execute household chores autonomously. However, robots still struggle to perform autonomous manipulation tasks in open-ended environments. In this context, this paper presents a method that enables a robot to manipulate a wide spectrum of articulated objects. In this paper, we automatically generate different robot low-level trajectory primitives to manipulate given object articulations. A very important point when it comes to generating expert trajectories is to consider the diversity of solutions to achieve the same goal. Indeed, knowing diverse low-level primitives to accomplish the same task enables the robot to choose the optimal solution in its real-world environment, with live constraints and unexpected changes. To do so, we propose a method based on Quality-Diversity algorithms that leverages sparse reward exploration in order to generate a set of diverse and high-performing trajectory primitives for a given manipulation task. We validated our method, QDTraj, by generating diverse trajectories in simulation and deploying them in the real world. QDTraj generates at least 5 times more diverse trajectories for both hinge and slider activation tasks, outperforming the other methods we compared against. We assessed the generalization of our method over 30 articulations of the PartNetMobility articulated object dataset, with an average of 704 different trajectories by task. Code is publicly available at: https://kappel.web.isir.upmc.fr/trajectory_primitive_website
Interaction force estimation for tactile sensor arrays: Toward tactile-based interaction control for robotic fingers
Nov 20, 2024Accurate estimation of interaction forces is crucial for achieving fine, dexterous control in robotic systems. Although tactile sensor arrays offer rich sensing capabilities, their effective use has been limited by challenges such as calibration complexities, nonlinearities, and deformation. In this paper, we tackle these issues by presenting a novel method for obtaining 3D force estimation using tactile sensor arrays. Unlike existing approaches that focus on specific or decoupled force components, our method estimates full 3D interaction forces across an array of distributed sensors, providing comprehensive real-time feedback. Through systematic data collection and model training, our approach overcomes the limitations of prior methods, achieving accurate and reliable tactile-based force estimation. Besides, we integrate this estimation in a real-time control loop, enabling implicit, stable force regulation that is critical for precise robotic manipulation. Experimental validation on the Allegro robot hand with uSkin sensors demonstrates the effectiveness of our approach in real-time control, and its ability to enhance the robot's adaptability and dexterity.
Domain Randomization for Sim2real Transfer of Automatically Generated Grasping Datasets
Oct 06, 2023



Robotic grasping refers to making a robotic system pick an object by applying forces and torques on its surface. Many recent studies use data-driven approaches to address grasping, but the sparse reward nature of this task made the learning process challenging to bootstrap. To avoid constraining the operational space, an increasing number of works propose grasping datasets to learn from. But most of them are limited to simulations. The present paper investigates how automatically generated grasps can be exploited in the real world. More than 7000 reach-and-grasp trajectories have been generated with Quality-Diversity (QD) methods on 3 different arms and grippers, including parallel fingers and a dexterous hand, and tested in the real world. Conducted analysis on the collected measure shows correlations between several Domain Randomization-based quality criteria and sim-to-real transferability. Key challenges regarding the reality gap for grasping have been identified, stressing matters on which researchers on grasping should focus in the future. A QD approach has finally been proposed for making grasps more robust to domain randomization, resulting in a transfer ratio of 84% on the Franka Research 3 arm.
E2R: a Hierarchical-Learning inspired Novelty-Search method to generate diverse repertoires of grasping trajectories
Oct 14, 2022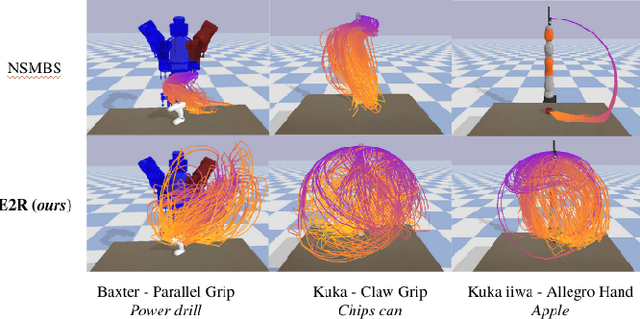
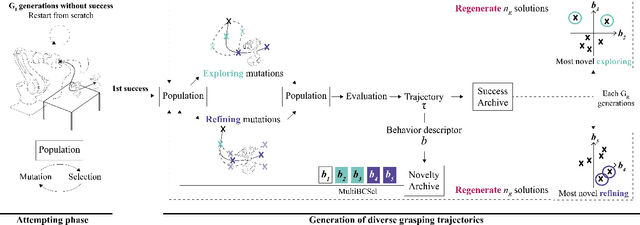
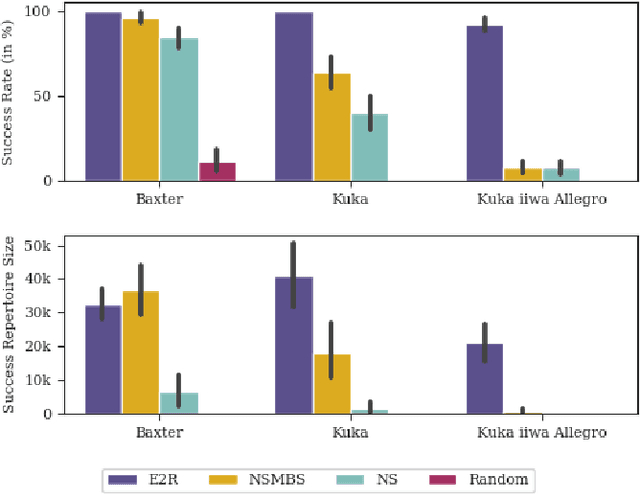
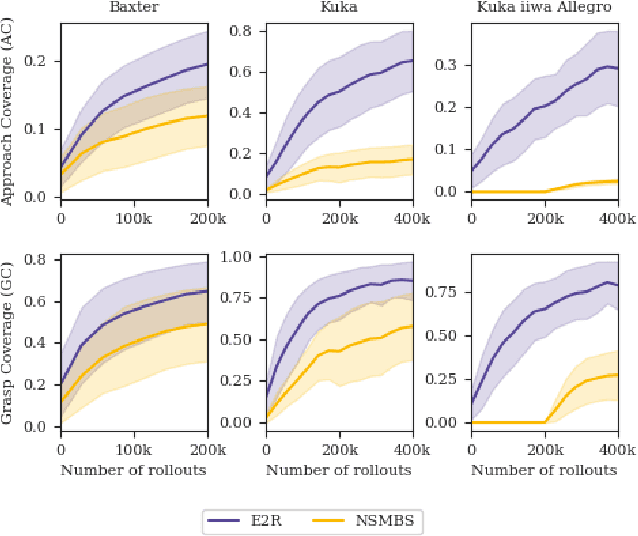
Robotics grasping refers to the task of making a robotic system pick an object by applying forces and torques on its surface. Despite the recent advances in data-driven approaches, grasping remains an unsolved problem. Most of the works on this task are relying on priors and heavy constraints to avoid the exploration problem. Novelty Search (NS) refers to evolutionary algorithms that replace selection of best performing individuals with selection of the most novel ones. Such methods have already shown promising results on hard exploration problems. In this work, we introduce a new NS-based method that can generate large datasets of grasping trajectories in a platform-agnostic manner. Inspired by the hierarchical learning paradigm, our method decouples approach and prehension to make the behavioral space smoother. Experiments conducted on 3 different robot-gripper setups and on several standard objects shows that our method outperforms state-of-the-art for generating diverse repertoire of grasping trajectories, getting a higher successful run ratio, as well as a better diversity for both approach and prehension. Some of the generated solutions have been successfully deployed on a real robot, showing the exploitability of the obtained repertoires.